Название: Программирование контроллера приёма, задержки и выдачи информации
Вид работы: реферат
Рубрика: Коммуникации и связь
Размер файла: 196.79 Kb
Скачать файл: referat.me-167974.docx
Краткое описание работы: ОЕННАЯ АКАДЕМИЯ СВЯЗИ Курсовой проект по дисциплине “Организация ЭВМ и систем”. “Программирование контроллера приёма, задержки и выдачи информации ”.
Программирование контроллера приёма, задержки и выдачи информации
![]() ВОЕННАЯ АКАДЕМИЯ СВЯЗИ
ВОЕННАЯ АКАДЕМИЯ СВЯЗИ
Курсовой проект
по дисциплине “Организация ЭВМ и систем”.
“Программирование контроллера приёма, задержки и выдачи информации ”.
Выполнили: мл.сержант 4382 уч.гр.
Москвичёв К.С.
курсант 4382 уч.гр.
Мухамадеев Т.В.
Проверил: преподаватель каф.20
Ладис Д.И.
Санкт-Петербург 2011г.
1. Задание.
Контроллер по запросу от управляемого объекта должен вызвать подпрограмму приёма в параллельном или последовательном коде N-байтов управляющего сообщения, в котором указывается произвольный управляющий шеснадцатиричный код, и записать его в модуль оперативной памяти. Затем перейти к подпрограмме временной задержки, реализуемую таймером. После истечения заданного времени задержки контроллер должен перейти к подпрограмме выдачи N-байтов принятого и задержанного управляющего сообщения в последовательном или параллельном коде в управляемый объект. Способ приёма и выдачи управляющей информации, время задержки указываются в варианте проекта.
Вариант № 6.
Порт приёма : 1a1a2a4c4
Таймер: 2Cч 2б2б7б10т15
Порт выдачи: 3в1в9в12в13в15в19
2. Цели проекта.
1. Разработать функциональную схему контроллера на основе БИС микропроцессорного комплекса 580 серии.
2. Разработать программу работы модулей (БИС) проектируемого контроллера.
3. Блок схема алгоритма работы контроллера
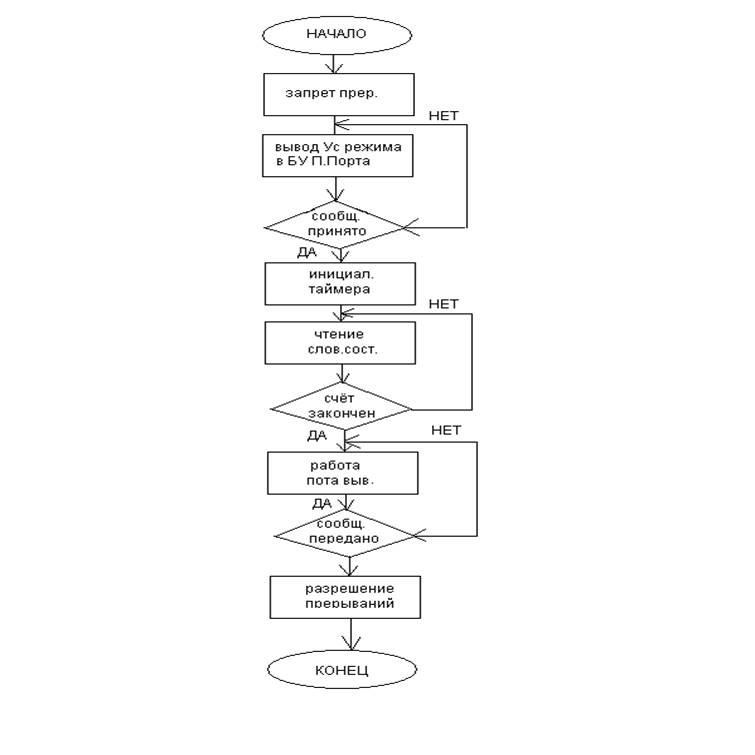
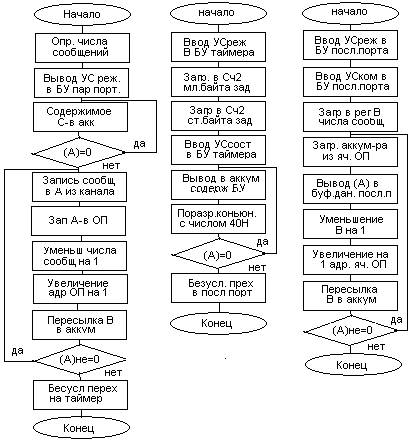
- Вычисление УС параллельного порта и слова для сравнения, время задержки для таймера, УС1
УС2
для таймера, УСреж. последовательного порта, УСком. последовательного порта.
Параллельный порт производит приём байтов в режиме 0 по каналу А с единичным значением по 4-му разряду канала С.
УС 0-го режима параллельного порта
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 1 | 0 | 0 | 1 | 1 | 0 | 0 | 1 |
D7- признак УС1
D6,D5 – режим 0 канала А
D4 – ввод по каналу А
D3 – ввод старших разрядов канала С
D2 – режим 0 канала В
D1 – режим ввода по каналу В
D0 – ввод младших разрядов канала С
![]()
- Управляющее слово параллельного порта = 99H .
- Слово для сравнения = 10H .
УС режима работы таймера
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
D7,D6 – номер счётчика
D5,D4 – запись младших и старших байтов Ксч
D3,D2,D1 – режим 1
D0 - 16-тиричная система
![]()
- УС режима работы таймера = 82H
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 1 | 1 | 1 | 0 | 1 | 0 | 0 | 0 |
D7,D6 – команда READBACK
D5,D4 – считывание СС
D3,D2,D1 – по второму счётчику
D0 – безразлично(не используется)
- УС состояния таймера = Е8H
Определение Ксч = Tзадержки х Fработы.сч
15х10-3 с х 2х106 Гц=30х103 раз.
- задержка 7530H
УС режима последовательного порта
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
D7,D6 – асинхронный режим с длительностью стоп бита 2Тх
D5 – контроль по чету
D4 – наличие контроля
D3,D2 – длинна символа 8-ми разрядов
D1,D0 – скорость передачи данных 1-64
![]()
- УС режима последовательного порта = FFH
УС команды последовательного порта
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 0 | 0 | 0 | 1 | 0 | 1 | 0 | 1 |
D7 – ввод режима поиска синхросимволов отменён (ЕN )
D6 – программный сброс адаптера (IR )
![]() D5 – запрос готовности приёмника БУ принять данные (RTS)
D5 – запрос готовности приёмника БУ принять данные (RTS)
D4 – сброс ошибок в СС (ЕR )
D3 – формирование низкого уровня на входе TxD
D2 – запрет приёмника (RxEN)
D1 – нет запроса готовности БУ выдать данные в порт
D0 – передача разрешения
![]()
- УС команду последовательного порта = 15H
5.Программа работы контроллера
| АДРЕС | КО | КОММЕНТАРИЙ | ||||
| Работа порта приёма | ||||||
| 0А00 | F3 | запрет прерываний. | ||||
| 0А01 | 06 | (В2)-рег.(В) MVI B | ||||
| 0А02 | 05 | количество байт инф. принимаемых в порту. | ||||
| 0А03 | 16 | (В2)-рег.(D) MVID | рег DE содержат адрес ОП куда надо записать данные | |||
| 0А04 | OB | старший разряд адреса ячейки памяти. | ||||
| 0А05 | 1E | (В2)-рег.(Е) MVI E | ||||
| 0А06 | FF | младший разряд адреса ячейки памяти. | ||||
| 0А07 | 3E | MVIA (следующий байт в аккумулятор) | загр. В аккум УС парал.порта | |||
| 0А08 | 99 | УС реж. параллельного порта | ||||
| 0А09 | D3 | OUT (вывод УС из аккум. В БУ) | загр. УС из аккум. в БУ парал.порта | |||
| 0А0А | 9B | БУ пар.порта | ||||
| 0А0В | DB | IN (загрузка содержимого канала С в аккум) | цикл проверяющий готовность порта принимать информацию если 4-ый разряд канала С 1- готов 0-не готов. |
|||
| 0А0С | 9A | адрес канала С | ||||
| 0А0D | E6 | ANI (поразрядная конъюнкция) | ||||
| 0A0E | 10 | выделение 4-го разряда | ||||
| 0A0F | CA | JZ (A==0 ―› переход (В3 В2)) | условный переход | |||
| 0A10 | OB | L-младший байт перехода. | ||||
| 0A11 | OA | H-старший байт перехода. | ||||
| 0A12 | DB | IN (загрузка аккум. из В2) | загрузка содерж. рег. В2 по кан. А в аккум | |||
| 0A13 | 98 | адрес канала А | ||||
| 0A14 | 12 | STAX (A) ―›M по адр. в паре регистров (E)(D) | ||||
| 0A15 | 05 | DCRB (B)-1 | уменьшение на 1 адресов ОП рег. В Е | |||
| 0A16 | 1D | DCRE (E)-1 | ||||
| 0A17 | F8 | MOVA,B для сравнения (В) ―›(А) | сод. рег.В помещ. в аккум для послед ср. | |||
| 0A18 | C2 | JNZ (A≠0 ―› переход на В3 В2) | условный переход | |||
| 0A19 | OB | L-младший байт перехода | ||||
| 0A1A | 0A | H-старший байт перехода | ||||
| 0A1B | C3 | JMP―›B3B2 | безусловный переход на таймер | |||
| 0A1C | 00 | L-младший байт перехода | ||||
| 0A1D | 08 | H-старший байт перехода | ||||
| Работа таймера | ||||||
| 0800 | 3E | MVI A | загрузка в аккум. УС1 таймера | |||
| 0801 | 82 | УС1 таймера | ||||
| 0802 | 03 | OUT | вывод УС1 в БУ таймера | |||
| 0803 | 72 | адрес БУ таймера | ||||
| 0804 | 3E | MVIA | загрузка данных по задержке в СЧ2 | |||
| 0805 | 0C | младший байт задержки | ||||
| 0806 | D3 | OUT | ||||
| 0807 | 71 | адрес СЧ2 | ||||
| 0808 | 3E | MVI A | ||||
| 0809 | 10 | старший байт задержки | ||||
| 080А | D3 | OUT | ||||
| 080В | 71 | адрес СЧ2 | ||||
| 080C | 3E | MVI A | загрузка в таймер УС2 для считывания СС | |||
| 080D | E8 | УС2 счётчика для считыв. СС | ||||
| 080E | D3 | OUT | ||||
| 080F | 72 | адрес БУ таймера | ||||
| 0810 | DB | IN | загрузка СС из БУ в аккумулятор | |||
| 0811 | 72 | адрес БУ таймера | ||||
| 0812 | E6 | ANI (поразрядная конъюнкция) | проверка окончания счёта 1-кон. 0-не конец | |||
| 0813 | 40 | выделение 6-го разряда | ||||
| 0814 | CA | JZ (A==0 ―› переход (В3 В2)) | сравнение аккум. с 0 если 0-переход 1-дальше. | |||
| 0815 | 10 | L-адр.перехода | ||||
| 0816 | 08 | H-адр.перехода | ||||
| 0817 | C3 | JMP | безусловный переход на порт выдачи | |||
| 0818 | 00 | L-адр.задержки | ||||
| 0819 | 09 | H- адр.задержки | ||||
| Работа порта выдачи | ||||||
| 0900 | 06 | MVI B | загрузка в параллельный порт управляющего слова режима и управляющего слова команды |
|||
| 0901 | 05 | кол-во байт информации | ||||
| 0902 | 1E | MVI E | ||||
| 0903 | FF | L разряда вдреса | ||||
| 0904 | 3E | MVI A | ||||
| 0905 | FF | УСреж. П- | ||||
| 0906 | D3 | OUT | ||||
| 0907 | 81 | адресБУП- | ||||
| 0908 | 3E | MVI A | ||||
| 0909 | 15 | УСком. П- | ||||
| 090A | D3 | OUT | ||||
| 090B | 81 | адресБУП- | ||||
| 090C | 1A | LDAX D,E | вывод информации в порт | |||
| 090D | D3 | OUT | ||||
| 090E | 81 | адресбуфера данныхП- | ||||
| 090F | 05 | DCRB (код кол-ва байт) | уменьшение В-1 Е-1 | |||
| 0910 | 1D | DCRE (мл. разряд адреса в ОП) | ||||
| 0911 | 78 | MOVA,B (из В в аакум.) | згр. из В в аккум | |||
| 0912 | C2 | JNZ (A≠0) ―› перех. на В3В2 | условный переход если А≠0 переход если А=0 след. ком. |
|||
| 0913 | 0C | L (мл.адрес перехода) | ||||
| 0914 | 09 | H (ст.адрес перехода) | ||||
| 0915 | F8 | Е1 (разрешение прерываний) | ||||
| 0916 | 76 | HTL (останов) | ||||
6. Схема контроллера.
7.Вывод:
Мы практически разработали функциональную схему контроллера на основе БИС микропроцессорного комплекса 580 серии и программу работы модулей проектируемого контроллера, который должен по запросу от управляемого объекта вызвать подпрограмму приёма в параллельном или последовательном коде N-байтов управляющего сообщения, в котором указывается произвольный управляющий шеснадцатиричный код, и записать его в модуль оперативной памяти. Затем перейти к подпрограмме временной задержки, реализуемую таймером. После истечения заданного времени задержки контроллер должен перейти к подпрограмме выдачи N-байтов принятого и задержанного управляющего сообщения в последовательном или параллельном коде в управляемый объект. Способ приёма и выдачи управляющей информации, время задержки указываются в варианте проекта.
Таким образом, проделав данную работу мы практически применили наши знания о модулях микропроцессорной ЭВМ. Закрепили знание команд микропроцессора В580ВМ80. Полностью разобрались с принципами составления управляющих слов портов ввода-вывода и таймера.
Похожие работы
-
Проектирование специализированного процессора
Московский Государственный Институт Электроники и Математики (Технический университет) Курсовая работа по курсу «Организация ЭВМ и систем» Тема: «Проектирование специализированного процессора»
-
Технология приборостроения
Министерство образования Российской Федерации Казанский государственный технический университет филиал «Восток» кафедра приборостроения КУРСОВОЙ ПРОЕКТ
-
Многопроцессорный вычислительный комплекс
Разработка структуры многопроцессорного вычислительного комплекса с многовходовым оперативным запоминающим устройством. Характеристика структурной схемы МПВК: блок генерации сигналов, блок микропроцессора, блок сопряжения, памяти и контроллеров пуска.
-
Изучение аппаратуры автоматизации водоотливной установки ВАВ-1М
Изучение назначения, функциональных возможностей и конструкции взрывобезопасной аппаратуры для автоматизации водоотливных установок - ВАВ-1М. Ее теоретические исследования и экспериментальные исследования. Работа системы автоматического управления.
-
Классификация телефонных аппаратов и их основные параметры
Содержание Содержание 1 1. Классификация телефонных аппаратов и их основные параметры 2 2. Основные отличительные функции и дополнительные возможности ТА 4
-
Разработка программы управления промышленным роботом на базе контроллера SIMATIC S5 фирмы SIEMEN
Министерство образования Украины Одесский государственный политехнический университет Кафедра автоматики и управления в технических системах Курсовая работа
-
Двоичный циклический код Хэмминга
Нахождение двоичного циклического кода Хэмминга, обеспечивающего передачу сообщений в системе связи с заданной вероятностью выдачи ложного сообщения. Структурная схема алгоритма расчета кода, листинг программы. Функциональные схемы кодера и декодера.
-
Микроконтроллер системы управления (автосигнализация)
Проектирование специализированных радиоэлектронных устройств с применением микропроцессорных комплектов и цифровых микросхем среднего и малого уровней интеграции. Архитектура микроконтроллеров семейства INTEL8051. Программа устройства на Ассемблере.
-
Микроконтроллер системы управления
Проектирование микроконтроллера системы управления холодильника, разработка принципиальной электрической и общей функциональной схемы устройства. Описание работы специальной прикладной программы. Программа устройства на Ассемблере. Блок-схема программы.
-
Разработка контроллера управления робототехнической системы
Разработка контроллера управления цифровой частью системы, перечень выполняемых команд. Описание алгоритма работы устройства, его структурная организация. Синтез принципиальной электрической схемы, особенности аппаратных затрат и потребляемой мощности.