Название: Расчет жесткого стержня
Вид работы: курсовая работа
Рубрика: Коммуникации и связь
Размер файла: 185.65 Kb
Скачать файл: referat.me-168799.docx
Краткое описание работы: Построение математической модели и составление программы для расчета опорных реакций жесткого стержня с тремя опорными узлами. Определение внутренних усилий, поперечной силы Q и изгибающего момента М во внутренних сечениях стержня под действием нагрузки.
Расчет жесткого стержня
Содержание
1. Задание
2. Схема нагруженного стержня
3. Исходные данные
4. Построение системы линейных алгебраических
5. Вывод формул проверки, достоверности вычисления опорных реакций
6. Вывод рабочих формул определение внутренних усилий стержня
7. Численный метод решения СЛАУ - метод Гаусса
8. Обоснование применения метода Гаусса
9. Блок - схема алгоритма
10. Программа
12. Анализ результатов
Литература
1. Задание
Построить математическую модель расчета опорных реакций жесткого стержня с тремя опорными узлами и определение внутренних усилий, поперечной силы Q и изгибающего момента М, возникающих во внутренних сечениях стержня под действием нагрузки. Разработать алгоритм и составить программу вычисления опорных реакций и распределения вдоль оси стержня внутренних усилий.
Вариант - 82-4г. Схема - 2.
Численный метод решения СЛАУ - метод Гаусса.
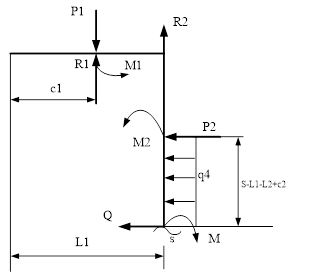
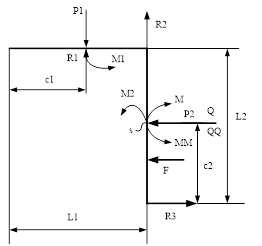
2. Схема нагруженного стержня
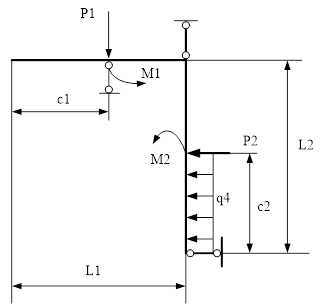
q4 - интенсивность распределенной нагрузки, H/м
C1, C2 - отрезок балки, м
L1, L2 - пролет балки, м
М1, M2 - круговой момент, H![]() м
м
3. Исходные данные
P1=15kH P2=30kHL1=6м L2=12м
M1=10kHм M2=35kHм С1=3м C2=2м
L1=6м L2=12м q4=10kH
|
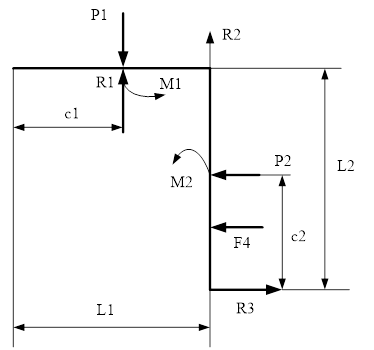
4. Построение системы линейных алгебраических
уравнений для определения опорных реакций.
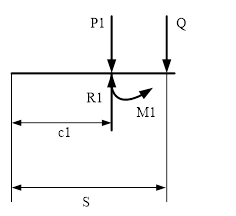
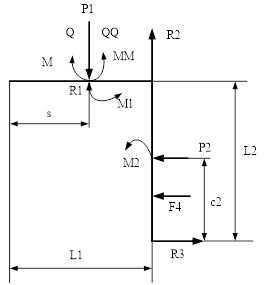
Преобразуем исходную систему:
отбросим опорные стержни и заменим их опорными
реакциями (R1; R2; R3)
интенсивность распределённой нагрузки заменим эквивалентной
силой (F4 = q4![]() c2)
c2)
зададим систему координат.
|
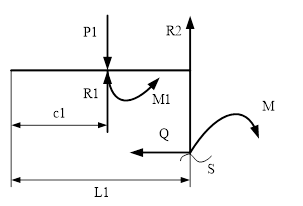
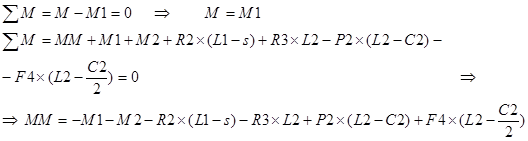
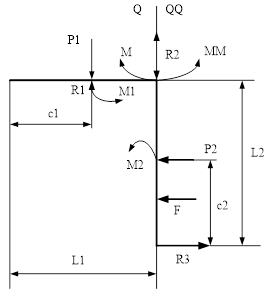
Для вывода формул вычисления опорных реакций запишем уравнение равновесия стержня: сумма моментов относительно опорной точки стержня равна нулю.
![]() :
:
![]()
![]()
![]()
![]()
![]()
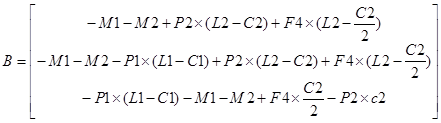
Представил уравнения равновесия балки в форме системы линейных алгебраических уравнений (СЛАУ).
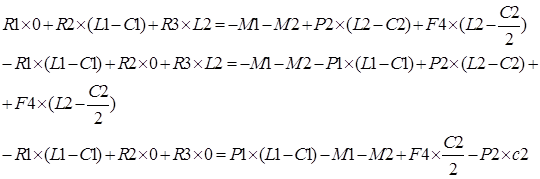
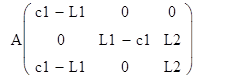
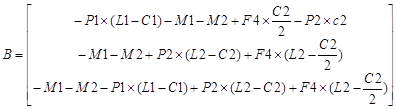
Матричная форма записи СЛАУ вычисление опорных реакций балки
A![]() R=B
R=B
А - матрица коэффициентов при неизвестных
R- матрица неизвестных
В - матрица свободных членов

5. Вывод формул проверки, достоверности вычисления опорных реакций
Для проверки правильности вычисления опорных реакций использовал уравнения равновесия балки, сумма проекций всех сил действующих на балку равна нулю.
Y=R1-P1+R2=0
X=R3-P2-F4=0
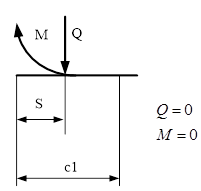
6. Вывод рабочих формул определение внутренних усилий стержня
На рассматриваемом стержне выделим четыре участка длиной S (длина отрезка от начала до точки сечения стержня), для которых составим формулы для вычисления внутренних усилий: поперечной силы Q и изгибающего момента М.
s - отрезок от начала до точки сечения балки
I cечение ![]()
II cечение ![]()
![]()
III cечение ![]()
![]()
IV cечение ![]()
![]()
![]()
В точках границ ![]() ,
, ![]() ,
,![]() организуем вычисления поперечной силы Q слева (и QQ справа), изгибающего момента М слева (и MМ справа) от рассматриваемых точек.
организуем вычисления поперечной силы Q слева (и QQ справа), изгибающего момента М слева (и MМ справа) от рассматриваемых точек.
1 точка границ: ![]()
![]()
2 точка границ: ![]()
![]()
3 точка границ: ![]()
![]()
7. Численный метод решения СЛАУ - метод Гаусса
Численный метод Гаусса относится к точным методам решения системы линейных алгебраических уравнений. Он основан на приведении матрицы коэффициентов ![]() к треугольному виду. Процесс поиска решения системы линейных алгебраических уравнений выполняется в два хода: прямой ход и обратный ход.
к треугольному виду. Процесс поиска решения системы линейных алгебраических уравнений выполняется в два хода: прямой ход и обратный ход.
Прямой ход исключения переменных выполняется путём преобразования коэффициентов СЛАУ, коэффициенты при неизвестных обращаются в нуль, начиная со второго по формулам:
![]() ;
; ![]() ;
; ![]() , где
, где
![]() ;
; ![]() ;
; ![]()
Процесс преобразования уравнений заканчивается последним уравнением. Результатом прямого хода является получение матрицы коэффициентов к треугольному виду.
Обратный ход (последовательное нахождение неизвестных
![]() ) выполняется по формулам:
) выполняется по формулам:
![]() ;
; ![]() ;
; ![]() ;
; ![]() , где
, где
![]() ;
; ![]()
В результате формируется матрица неизвестных: ![]() Метод Гаусса для решения СЛАУ применим при условии, что все диагональные элементы матрицы
Метод Гаусса для решения СЛАУ применим при условии, что все диагональные элементы матрицы ![]() отличны от нуля, т.е.
отличны от нуля, т.е. ![]() , где
, где ![]() .
.
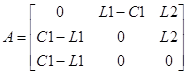
8. Обоснование применения метода Гаусса
Исходная СЛАУ имеет на главной диагонали элементы равные нулю:
![]()
![]()
![]()
следовательно, метод Гаусса применять нельзя.
Для того чтобы использовать численный метод Гаусса для решения данной СЛАУ необходимо её преобразовать. Для этого необходимо применить к исходной СЛАУ схему выбора главных элементов. В исходной СЛАУ переставим уравнения местами: первое уравнение поставим на второе место, второе уравнение поставим на третье место, третье уравнение поставим на первое место.
В результате на главной диагонали матрицы А отсутствуют члены равные нулю.
![]()
Для повышения точности получаемого решения СЛАУ матрица А должна быть диагонально преобладающей:
![]() ,
, ![]()
![]()
Преобразованная СЛАУ имеет вид:

Условия применения метода Гаусса выполняются, следовательно, метод Гаусса можно использовать для решения преобразованной СЛАУ.
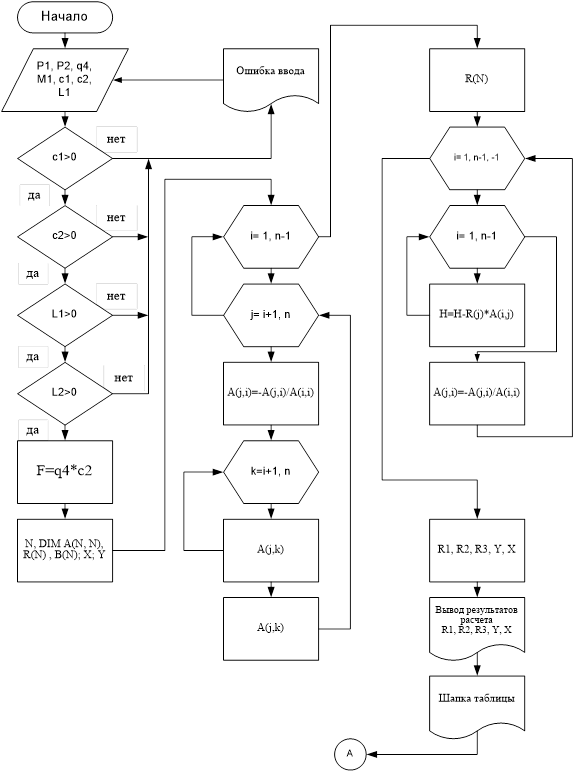
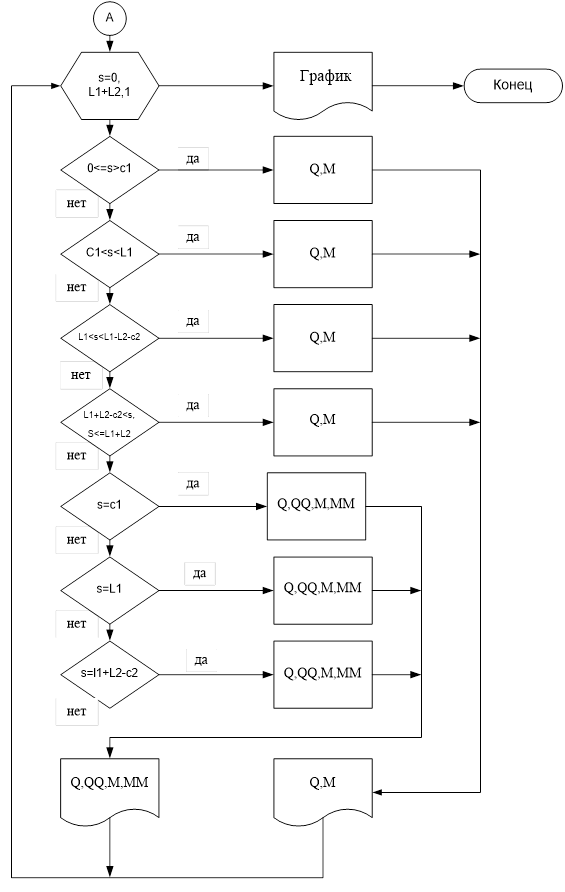
9. Блок - схема алгоритма
10. Программа
CLS
SCREEN 12
WINDOW (20, 20) - (-20, - 20)
N = 3
PRINT "Программу составил студент гр.320851 Клычников А.В."
50 PRINT " Расчет жесткого стержня "
PRINT " Исходные данные"
INPUT "Интенсивность распределения нагрузки q4 (кH/м) ="; q4
INPUT "Отрезок балки С1 (м) ="; C1
INPUT "Пролет балки L1 (м) ="; L1
INPUT "Отрезок балки C2 (м) ="; c2
INPUT "Пролет балки L2 (м) ="; L2
INPUT "Круговой момент M1 (кH*м) ="; M1
INPUT "Круговой момент M2 (кH*м) ="; M2
INPUT "Сосредоточенная сила P1 (кH) ="; P1
INPUT "Сосредоточенная сила P2 (кH) ="; P2
PRINT " "
IF C1 > 0 THEN GOTO 10 ELSE GOTO 40
10 IF c2 > 0 THEN GOTO 20 ELSE GOTO 40
20 IF L1 > C1 THEN GOTO 30 ELSE GOTO 40
30 IF L2 > c2 THEN GOTO 60 ELSE GOTO 40
40 PRINT "Ошибка ввода": GOTO 50
60 F = q4 * c2
DIM A (N, N), R (N), B (N)
A (1,1) = - (L1 - C1): A (1,2) = 0: A (1,3) = 0
A (2,1) = 0: A (2,2) = L1 - C1: A (2,3) = L2
A (3,1) = - (L1 - C1): A (3,2) = 0: A (3,3) = L2
B (1) = P1 * (L1 - C1) - M1 - F * (C1/2) - M2 - P2 * c2
B (2) = F * (L2 - c2/2) - M1 + P2 * (L2 - c2) - M2
B (3) = - P1 * (L1 - C1) - M1 + F * (L2 - c2/2) - M2 + P2 * (L2 - c2)
FOR I = 1 TO N - 1
FOR J = I + 1 TO N
A (J, I) = - A (J, I) / A (I, I)
FOR K = I + 1 TO N
A (J, K) = A (J, K) + A (J, I) * A (I, K): NEXT K
B (J) = B (J) + A (J, I) * B (I): NEXT J
NEXT I
R (N) = B (N) / A (N, N)
FOR I = N - 1 TO 1 STEP - 1: H = B (I)
FOR J = I + 1 TO N: H = H - R (J) * A (I, J): NEXT J
R (I) = H / A (I, I)
NEXT I
R1 = R (1): R2 = R (2): R3 = R (3)
X = R1 - P1 + R2
Y = R3 - P2 - F
PRINT " Результаты "
PRINT "Опорная реакция в точке 1 R1="; R (1); "kН"
PRINT "Опорная реакция в точке 2 R2="; R (2); "kН"
PRINT "Опорная реакция в точке 3 R3="; R (3); "kН"
PRINT "Y="; Y; " X="; X
PRINT " Таблица ординат эпюр Q и M "
PRINT " S Q M QQ MM"
FOR s = 0 TO L1 + L2
IF s >= 0 AND s < C1 THEN
Q = 0
M = 0
GOTO 70
END IF
IF s > C1 AND s < L1 THEN
Q = R1 - P1
M = P1 * (s - C1) - R1 * (s - C1) + M1
GOTO 70
END IF
IF s > L1 AND s < L1 + L2 - c2 THEN
Q = 0
M = P1 * (L1 - C1) - R1 * (L1 - C1) + M1
GOTO 70
END IF
IF s > L1 + L2 - c2 AND s <= L1 + L2 THEN
Q = - P2 - q4 * (s - L1 - L2 + c2)
M = P1 * (L1 - C1) - R1 * (L1 - C1) + M1 + M2 + P2 * (s - L1 - L2 + c2) + q4 * (s - L1 - L2 + c2) * (s - L1 - L2 + c2) / 2
GOTO 70
END IF
IF s = C1 THEN
Q = R1 - P1
M = M1
QQ = R2 - P1 + R1
MM = - M1 - R2 * (L1 - s) + P2 * (L2 - c2) - M2 - R3 * L2 + F * (L2 - c2/2)
GOTO 80
END IF
IF s = L1 THEN
Q = R1 - P1 + R2
M = P1 * (s - C1) - R1 * (s - C1) + M1
QQ = R2
MM = P2 * (L2 - c2) - M2 - R3 * L2 + F * (L2 - c2/2)
GOTO 80
END IF
IF s = L1 + L2 - c2 THEN
Q = - P2
M = M2 + P1 * (L1 - C1) - R1 * (L1 - C1) + M1 + F * (L1 - C1) / 2 - 30
QQ = R3 - P2 - F
MM = - M2 - R3 * c2 + F
GOTO 80
END IF
70 PRINT USING "##. ## ####. #### ####. ####"; s; Q; M: GOTO 90
80 PRINT USING "##. ## ####. #### ####. #### ####. #### ####. ####"; s; Q; M; QQ; MM
90 NEXT s
A$ = INPUT$ (1)
LINE (10,8) - (18,8), 8
LINE (10,3) - (10, 20), 8
FOR Z = 10 TO 18 STEP.5
LINE (Z, 7.9) - (Z, 8.1), 8
FOR W = 3 TO 20 STEP.5
LINE (9.9, W) - (10.1, W), 8
NEXT W
NEXT Z
LINE (10, - 3) - (18, - 3), 8
LINE (10, 0) - (10, - 18), 8
FOR Z = 10 TO 18 STEP.5
LINE (Z, - 2.9) - (Z, - 3.1), 8
FOR W = - 18 TO 0 STEP.5
LINE (9.9, W) - (10.1, W), 8
NEXT W
NEXT ZFOR T = 0 TO L1 + L2 STEP.001
IF T >= 0 AND T < C1 THEN
Q = 0
M = 0
V1 = Q
U1 = M
GOTO 100
END IF
IF T > C1 AND T < L1 THEN
Q = R1 - P1
M = P1 * (T - C1) - R1 * (T - C1) + M1
V2 = Q
U2 = M
GOTO 100
END IF
IF T > L1 AND T < L1 + L2 - c2 THEN
Q = 0
M = P1 * (L1 - C1) - R1 * (L1 - C1) + M1
V3 = Q
U3 = M
GOTO 100
END IF
IF T > L1 + L2 - c2 AND T <= L1 + L2 THEN
Q = - P2 - q4 * (T - L1 - L2 + c2)
M = P1 * (L1 - C1) - R1 * (L1 - C1) + M1 + M2 + P2 * (T - L1 - L2 + c2) + q4* * (T - L1 - L2 + c2) * (T - L1 - L2 + c2) / 2
GOTO 100
END IF
100 PSET (T / 3 + 10, Q / 3 + 8), 4
PSET (T / 3 + 10, M / 3 - 3), 5
NEXT T
T = C1: GOTO 110
110 Q = R1 - P1
M = M1
PSET (T / 3 + 10, Q / 3 + 8), 4
PSET (T / 3 + 10, M / 3 - 3), 5
LINE (T / 3 + 10, V1/3 + 8) - (T / 3 + 10, Q / 3 + 8), 4
LINE (T / 3 + 10, U1/3 - 3) - (T / 3 + 10, M / 3 - 3), 5
T = L1: GOTO 120
120 Q = R1 - P1 + R2
M = P1 * (T - C1) - R1 * (T - C1) + M1
PSET (T / 3 + 10, Q / 3 + 8), 4
PSET (T / 3 + 10, M / 3 - 3), 5
LINE (T / 3 + 10, V2/3 + 8) - (T / 3 + 10, Q / 3 + 8), 4
LINE (T / 3 + 10, U2/3 - 3) - (T / 3 + 10, M / 3 - 3), 5
T = L1 + L2 - c2: GOTO 130
130 Q = - P2
M = M2 + P1 * (L1 - C1) - R1 * (L1 - C1) + M1 + F * (L1 - C1) / 2
PSET (T / 3 + 10, Q / 3 + 8), 4
PSET (T / 3 + 10, M / 3 - 3), 5
LINE (T / 3 + 10, V3/3 + 8) - (T / 3 + 10, Q / 3 + 8), 4
LINE (T / 3 + 10, U3/3 - 3) - (T / 3 + 10, M / 3 - 3), 5
END
11. Форма ввода - вывода информации
Программу составил студент гр.320851 Клычников А.В."
Расчет жесткого стержня
Исходные данные
Интенсивность распределения нагрузки q4 (кH/м) = 10
Отрезок балки c1 (м) = 3
Пролет балки L1 (м) = 6
Отрезок балки c2 (м) = 2
Пролет балки L2 (м) = 12
Круговой момент M1 (кH*м) = 10
Круговой момент M2 (кH*м) = 35
Сосредоточенная сила P1 (кH) = 15
Сосредоточенная сила P2 (кH) = 30
Результаты
Опорная реакция в точке 1 R1=56.6668kН
Опорная реакция в точке 2 R2=-41.6667kН
Опорная реакция в точке 3 R3=50kН
Y=0 X=![]()
PRINT " Таблица ординат эпюр Q и M "
xQM QQMM
0.0000 0.0000 0.0000
1.0000 0.0000 0.0000
2.0000 0.0000 0.0000
3.0000 41.6667 10.0000 0.0000 0.0000
4.0000 41.6667 -31.6667
5.0000 41.6667 -73.3334
6.0000 0.0000 -115.0000 -41.6667 -115.0000
7.0000 0.0000 -115.0000
8.0000 0.0000 -115.0000
9.0000 0.0000 -115.0000
10.0000 0.0000 -115.0000
12.0000 0.0000 -115.0000
13.0000 0.0000 -115.0000
14.0000 0.0000 -115.0000
15.0000 0.0000 -115.0000
16.0000 -30.0000 -80.0000 0.0000 -115.0000
17.0000 -40.0000 -45.0000
18.0000 -50.000 0.0000
Проверка по оси X =0
Программу составил студент Лазарев В.А. гр.320851
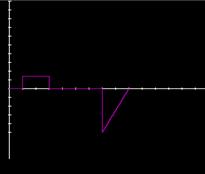
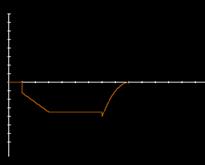
12. Анализ результатов
Эпюры поперечной силы Q и изгибающего момента М.
Q (kH) M (kHм)
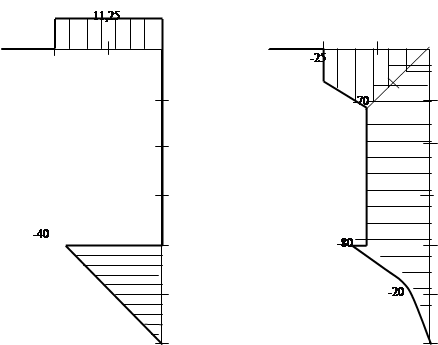 |
Анализ результатов показал, что наиболее напряженное сечение стержня находится в точке с координатой S=14м, Q=-40 kH, M=-80kHм.
Литература
1. Данилина Н.И. Численные методы. - М.: Выш. шк. 1976г. - 368 с.
2. Дъяков В.П. Справочник по алгоритмам и программам на языке Бейсик для ПЭВМ. - М.: Наука, 1987г. - 240с.
Похожие работы
-
Система автоматизации стабилизации уровня вибраций
Работа, устройство трехконтурной автоматической системы управления упругими перемещениями системы СПИД в процессе обработки, ее практическое применение и преимущества. Структурная схема контура, анализ устойчивости, определение оптимальных частот работы.
-
Приемная антенна для СТВ
Министерство образования Российской Федерации. ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР). Кафедра сверхвысоких частот и квантовой радиотехники
-
Проектирование решетки диэлектрических стержневых антенн
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ РЯЗАНСКИЙ ГОСУДАРСТВЕННЫЙ РАДИОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ КАФЕДРА РАДИОУПРАВЛЕНИЯ И СВЯЗИ курсовой проект
-
История и устройство микрофонов
Изобретение инструмента для усиления слабых звуков. Современный микрофон как устройство для преобразования акустического сигнала в электрический с сохранением волновых характеристик. Жидкостный, угольный, ленточный, динамический и конденсаторный микрофоны
-
Методика выполнения прочностных расчетов электрорадиоэлементов и элементов конструкций радиоэлектронной аппаратуры
Произведение расчета собственных частот колебаний резистора, инерционной силы, изгибающих моментов, максимальных допустимых напряжений в местах крепления и виброперегрузок для оценки прочности конструкций электрорадиоэлементов на примере печатных плат.
-
Электродинамический преобразователь энергии с тиристорной схемой питания
Тольяттинский политехнический институт Кафедра «Промышленная электроника» Курсовая работа по МАРЭС ЭЛЕКТРОДИНАМИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ С ТИРИСТОРНОЙ СХЕМОЙ ПИТАНИЯ
-
Ультразвуковые колебательные системы технологического оборудования. Классификация колебательных систем
Ультразвуковая колебательная система (УЗКС). Продольные и поперечные деформации в нулевой продольной волне. Сдвиговые деформации в нулевой крутильной волне, в изгибной волне. Типы упругих колебаний. Полуволновые колебательные системы с преобразователем.
-
Трансформаторы: уравнение обмотки, рабочие режимы, холостой ход, конструкция, магнитные материалы, электрические провода и изоляция
Формула трансформатора ЭДС. Уравнение равновесия для первичной обмотки. Режим ХХ трансформатора. Рабочий режим трансформатора: уравнение равновесия намагничивающих сил (УРНС). Рабочий режим трансформатора: эквивалентная схема и векторная диаграмма.
-
Двухзеркальная антенна по схеме Кассергена
Министерство образования Российской Федерации УГТУ-УПИ имени С.М. Кирова Кафедра ВЧСРТ группа Р-398 оценка двухзеркальная антенна по схеме кассергена
-
Проектирование и расчёт микронного многооборотного микроиндикатора
Проектирование по предложенной схеме микронного многооборотного микроиндикатора, краткое описание строения и работы устройства. Проектирование зубчатой передачи, расчёт основных параметров силовой пружины. Определение параметров натяжного волоска.