Название: Цифровые системы радиоавтоматики. Примеры реализации цифровых следящих систем
Вид работы: реферат
Рубрика: Коммуникации и связь
Размер файла: 114 Kb
Скачать файл: referat.me-170211.docx
Краткое описание работы: Цифровой опорный генератор на линии задержки с отводами. Ограничения в применении схемы при высокой частоте входного сигнала, вследствие ограниченного быстродействия элементной базы. Схемы опорных генераторов, расширяющие частотный диапазон применения.
Цифровые системы радиоавтоматики. Примеры реализации цифровых следящих систем
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра РТС
РЕФЕРАТ
На тему:
“Цифровые системы радиоавтоматики.
Примеры реализации цифровых следящих систем”
МИНСК, 2008
Цифровой опорный генератор на линии задержки с отводами. Рассмотренные выше схемы опорных генераторов требуют для обеспечения необходимого (достаточно малого) дискрета подстройки, определяющего точность слежения, чтобы частота задающего генератора существенно превышала частоту входного сигнала. Это ограничивает применение схемы при высокой частоте входного сигнала, вследствие ограниченного быстродействия элементной базы. Ниже рассматриваются схемы опорных генераторов, позволяющие расширить частотный диапазон применения.
Опорный генератор на линии задержки с отводами (рис.1) обеспечивает формирование опорного сигнала с частотой, равной частоте задающего генератора.

Рис.1. Параметры линии задержки определяются соотношениями:
![]() ;
;
![]()
Дискрет подстройки фазы равен ![]() .
.
На выходах линии задержки формируется многофазная импульсная последовательность (рис.2).
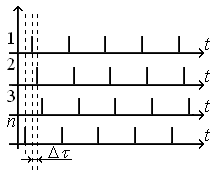
Рис.2. Многофазная импульсная последовательность
Мультиплексор коммутирует импульсную последовательность в соответствии с адресом, поступившим с реверсивного счетчика. Схема привязки обеспечивает привязку момента смены показаний счетчика к выходному сигналу (для предотвращения их совпадения).
В анализируемой схеме задержка формируется по закону унитарного кода.
Рассмотрим схему, в которой формирование задержки производится по принципу позиционной системы счисления. Величина дискрета задержки в разрядах (вес разряда) определяется положением разряда, а количество дискретов задержки в разряде – выбранным основанием (базисом).
Пусть ![]()
![]() =
= ![]() ,
,
где ![]() выбранный базис системы счисления; n ─ число разрядов позиционного кода. Суммарная задержка (
выбранный базис системы счисления; n ─ число разрядов позиционного кода. Суммарная задержка (![]() -
- ![]() ) может быть набрана с помощью последовательно включенных n линий задержки. Дискрет задержки каждой последующей линии возрастает пропорционально выбранному базису
) может быть набрана с помощью последовательно включенных n линий задержки. Дискрет задержки каждой последующей линии возрастает пропорционально выбранному базису![]() . Дискрет коррекции фазы опорного сигнала определяется величиной дискрета задержки
. Дискрет коррекции фазы опорного сигнала определяется величиной дискрета задержки ![]() первой линии, образующей младший разряд. Задержка первой линии равна
первой линии, образующей младший разряд. Задержка первой линии равна ![]() . Дискрет задержки второй линии ─
. Дискрет задержки второй линии ─ ![]() а суммарная задержка ─
а суммарная задержка ─ ![]() и т.д. Дискрет задержки n-й линии равен
и т.д. Дискрет задержки n-й линии равен![]() , а суммарная величина задержки ─
, а суммарная величина задержки ─ ![]() Необходимая величина относительной нестабильности линии задержки составляет
Необходимая величина относительной нестабильности линии задержки составляет ![]()
Схема дискретного фазовращателя приведена на рис.3.
Задающий генератор генерирует сигнал стабильной частоты. С помощью элементов задержки и переключателей производится задержка сигнала задающего генератора по закону управляющего кода. В качестве переключателей могут быть использованы элементы 2И-ИЛИ. Реверсивный счетчик предназначен для формирования управляющего кода. Запоминающее устройство обеспечивает хранение управляющего кода и привязку моментов его изменения к выходным сигналам элементов задержки, что исключает возможность переключения входов и выходов элементов задержки в момент присутствия на входах переключателей сигналов.
Дискрет подстройки фазы управляемого сигнала равен 2![]() /
/![]() . Объем оборудования, необходимый для построения цифрового фазовращателя, определяется в основном числом отводов, являющихся входами мультиплексоров. Число входов определяет сложность мультиплексоров, коэффициенты пересчета счетчиков, формирующих управляющий код. В соответствии с этим критерием оптимальным является дискретный фазовращатель с линией задержки сформированной по принципу формирования двоичного кода.
. Объем оборудования, необходимый для построения цифрового фазовращателя, определяется в основном числом отводов, являющихся входами мультиплексоров. Число входов определяет сложность мультиплексоров, коэффициенты пересчета счетчиков, формирующих управляющий код. В соответствии с этим критерием оптимальным является дискретный фазовращатель с линией задержки сформированной по принципу формирования двоичного кода.
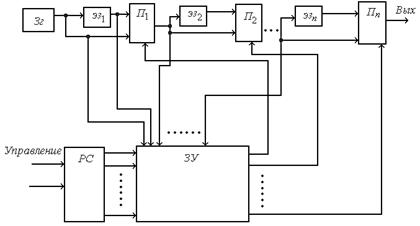
Рис.3. Функциональная схема дискретного фазовращателя:
Зг - задающий генератор; Эз1,…, Эзn – элементы задаржки; П1,…, Пn – переключатели; РС – реверсивный счетчик; ЗУ – запоминающее устройство.
Рассмотренные технические решения обеспечивают работу задающего генератора на частоте входного сигнала, что позволяет существенно расширить частотный диапазон применения ЦСФС. Однако для реализации систем необходимо наличие линий задержки с широким перечнем номиналов. Использование аналоговых линий задержки, кроме того требует применения схем согласования со входами цифровых элементов.
Формирование опорного сигнала методом временной трансформации. Рассмотрим сущность метода, иллюстрируемого схемой (рис.4)
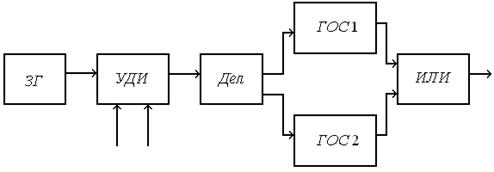
Рис.4. Схема опорного генератора: ЗГ – задающий генератор; УДИ – устройство добавления-исключения; Дел – делитель; ГОС 1, ГОС 2 – генераторы опорного сигнала; ИЛИ – логический элемент.
Из высокостабильного сигнала задающего генератора ЗГ делением его частоты формируется управляемый синхросигнал, которым периодически фазируются коммутируемые генераторы опорного сигнала (ГОС). Фаза управляемого сигнала корректируется с помощью УДВ. В качестве ГОС используются генераторы ударного возбуждения, запуск которых производится по срезу управляемого синхросигнала, а гашение колебаний – по фронту. ГОС генерирует сигнал при наличии на управляющем входе уровня логического нуля.
Частоты опорного сигнала (ОС) и сигнала задающего генератора определяются одним из следующих соотношений:
![]() (1)
(1)
или
![]() , (2)
, (2)
гдеm>>1, число, определяющее величину дискрета подстройки. Пусть соотношения частот ![]() и
и ![]() определяются выражением
определяются выражением
![]() =
= ![]() или
или ![]() =
=![]() , (3)
, (3)
где ![]() ─ период сигнала ЗГ;
─ период сигнала ЗГ; ![]() ─ период ОС.
─ период ОС.
Период регулирования формируется путем деления импульсной последовательностизадающего генератора на 2m. При этом период синхросигнала при отсутствии коррекции равен ![]() , а период регулирования ГОС –
, а период регулирования ГОС – ![]() , т. е.
, т. е.
![]() (4)
(4)
Таким образом, период синхросигнала равен целому числу (m) периодов сигнала ЗГ и целому числу (![]() ) периодов ОС.
) периодов ОС.
Поэтому при отсутствии импульсов коррекции на входе УДИ периодическое фазирование ГОС синхросигналом не приведет к разрыву фазы опорного сигнала.
Добавление с помощью УДИ импульса коррекции в последовательность, формируемую ЗГ, приведет к уменьшению периода регулирования на величину ![]() :
:
![]() . (5)
. (5)
уменьшение ![]() в единицах периода ГОС составит:
в единицах периода ГОС составит:
![]() (6)
(6)
Поскольку фаза ОС жестко “привязана” к фронту синхросигнала, то изменение периода следования последнего на величину ![]() приведет к сдвигу на опережение временного положения фронта синхросигнала относительно нулевой фазы ОС, в силу периодичности ОС на величину:
приведет к сдвигу на опережение временного положения фронта синхросигнала относительно нулевой фазы ОС, в силу периодичности ОС на величину:
![]()
что соответствует сдвигу по фазе опорного сигнала на дискрет, равный
![]() .
.
Вычитание импульса из последовательности ЗГ приведет к увеличению периода регулирования на ![]() :
:
![]()
что приведет к сдвигу на отставание временного положения фронта синхросигнала относительно нулевой фазы ОС на величину
-![]()
что соответствует сдвигу по фазе опорного сигнала на дискрет, равный
![]() .
.
В качестве фазируемых ГОС могут быть использованы генераторы ударного возбуждения, поочередно коммутируемые синхросигналом, генераторы прямоугольных импульсов, в том числе генераторы релаксационного типа. Необходимость фазирования внешним сигналом, обеспечения малой длительности переходных процессов, простоты реализации предполагают использование ГОС с невысокими требованиями к их стабильности.
Требования к стабильности частоты генераторов. Определим требования к стабильности ГОС.
Пусть ![]() определяется выражением 5. Тогда на временном интервале, равном
определяется выражением 5. Тогда на временном интервале, равном ![]() ГОС работает в режиме свободных колебаний. При этом “набег” фазы ОС относительно ЗГ
ГОС работает в режиме свободных колебаний. При этом “набег” фазы ОС относительно ЗГ ![]() обусловленный взаимной нестабильностью частот
обусловленный взаимной нестабильностью частот ![]() и
и ![]() растет по линейному закону.
растет по линейному закону.
Периодическая функция ![]() может быть определена следующим образом:
может быть определена следующим образом:
![]() , при
, при ![]() , (7)
, (7)
где ![]() - взаимная нестабильность частот
- взаимная нестабильность частот ![]() и
и ![]() . При высокой стабильности задающего генератора величина
. При высокой стабильности задающего генератора величина ![]() определяет относительную нестабильность ГОС.
определяет относительную нестабильность ГОС.
Максимальный набег фазы на интервале периода регулирования составит величину
![]()
Среднее значение процесса ![]() и дисперсию
и дисперсию ![]() найдем усреднением
найдем усреднением ![]() по времени.
по времени.
![]() ; (8)
; (8)
 . (9)
. (9)
Среднеквадратическое отклонение “набега” фазы:
![]() . (10)
. (10)
Максимальное отклонение относительно среднего значения равно
![]()
Таким образом, максимальное отклонение набега фазы относительно среднего значения равно
![]()
Интенсивность флуктуаций фазы относительно среднего значения в отсутствие шумов на входе определяет ошибку синхронизации в системе, построенной на основе анализируемого цифрового управляемого генератора, поскольку в стационарном режиме система отслеживает среднее значение.
Известно, что максимальная ошибка синхронизации ЦСФС, обусловленная дискретностью коррекции фазы в отсутствие шумов на входе равна величине дискрета подстройки фазы (2![]() ).
).
Приняв величину ![]() за максимально допустимое отклонение относительно среднего значения:
за максимально допустимое отклонение относительно среднего значения:
![]()
![]()
![]() /
m,
/
m,
определим допустимую нестабильность частоты ГОС
![]()
![]() ,
,![]()
где ![]() – относительная нестабильность частот ЗГ и ГОС.
– относительная нестабильность частот ЗГ и ГОС.
Выполнение этого условия позволит при расчете динамической ошибки слежения учитывать нестабильность задающего генератора.
Расчетные величины относительной нестабильности представлены в табл.1. Выполнение этого условия позволит в формуле для расчета динамической ошибки слежения учитывать нестабильность задающего генератора.
Результаты расчета показывают, что приемлемая точность может быть достигнута при относительной нестабильности ![]() , что может быть обеспечено при использовании LC-генераторов.
, что может быть обеспечено при использовании LC-генераторов.
Если частота эталонного сигнала меньше предельной частоты переключения элементной базы, цифровой управляемый генератор может быть выполнен по комбинированной схеме с использованием делителя. При этом увеличением дискрета подстройки снижаются требования к стабильности ГОС. Для сохранения заданной величины дискрета подстройки пропорционально увеличивается частота ЗГ и ГОС и производится последующее деление опорного сигнала до частоты эталонного.
Таким образом, использование метода временной трансформации позволяет значительно (в десятки раз) расширить частотный диапазон работы ЦСФС.
Таблица 1. Зависимость допустимых значений относительной нестабильности синхронизируемых генераторов от величины дискрета подстройки по фазе. ![]()
№ п/п |
|
|
| 1 | 3*10-5 | |
| 2 | 2*10-4 | |
| 3 | 4,8*10-4 | |
| 4 | 1,9*10-3 |
Примеры реализации цифровых следящих систем
В качестве примеров рассмотрим схемы цифровых систем ФАПЧ с астатизмом второго порядка, реализующие методы дискретного управления фазой и дискретного управления частотой.
Схема ЦФАПЧ с дискретным управлением фазой приведена на рис.5.
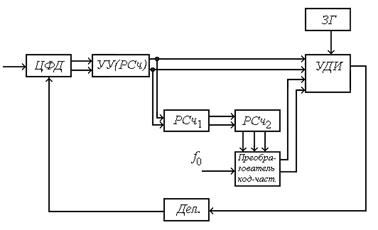
Рис.5. Схема ФАПЧ с дискретным управлением фазой.
Система состоит из двух колец регулирования: пропорционального и интегрирующего, Интегрирующее включает реверсивные счетчики РСч1 и РСч2 и преобразователь код-частота. Расстройка между частотой входного и опорного сигналов приводит к преобладанию импульсов счетно - импульсного кода на одном из выходов ЦФД. В результате этого реверсивный счетчик УУ будет переполняться по одному из входов и на вход интегратора РСч1, РСч2 будут поступать импульсы переполнения. В интеграторе накопится код, пропорциональный частотной расстройке. Этот код является управляющим для преобразователя код-частота. В результате на выходе ПКЧ сформируется последовательность импульсов с постоянной частотой, пропорциональной частотной расстройке. Имульсы поступают на УДИ и осуществляют коррекцию частоты опорного сигнала, равную в установившемся режиме первоначальной частотной расстройке. В качестве ПКЧ может быть использован цифровой синтезатор частот с суммированием импульсных последовательностей (рис.6).
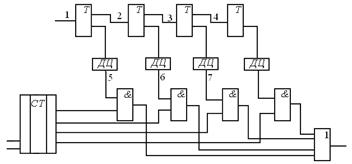
Рис.6. Схема цифрового синтезатора частот с суммированием импульных последовательностей: ДЦ – дифференцирующая цепь.
Цифровая схема ФАПЧ с дискретным управлением частотой приведена на рис.7.
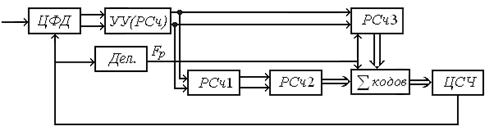
Рис.7. Схема ФАПЧ с дискретным управлением частотой
Сумматор кодов содержит полный код частоты, который управляет частотой цифрового синтезатора частоты. Реверсивный счетчик 2 постоянно подключен к сумматору кодов, а РС 3 периодически подключается к сумматору и его код переписывается в сумматор, а затем сбрасывается (запись и сброс производится импульсом с делителя).
Таким образом, информация РС 3 обновляется каждый период (с частотой регулирования![]() ). Сумматор кодов должен обладать памятью, т. е. является сумматором накапливающего типа.
). Сумматор кодов должен обладать памятью, т. е. является сумматором накапливающего типа.
ЛИТЕРАТУРА
1. Коновалов. Г.Ф. Радиоавтоматика: Учебник для вузов. – М.: Высш. шк., 2000.
2. Радиоавтоматика: Учеб. пособие для вузов. / Под ред. В.А. Бесекерского. - М.: Высш. шк., 2005.
3. Первачев С.В. Радиоавтоматика: Учебник для вузов. - М.: Радио и связь, 2002.
4. Цифровые системы фазовой синхронизации / Под ред. М.И. Жодзишского – М.: Радио, 2000.
Похожие работы
-
Описание систем радиоавтоматики
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ кафедра радиотехнических систем РЕФЕРАТ на тему: «Описание систем РАдиоавтоматики»
-
Виды передаточной характеристики
Передаточные функции системы радиоавтоматики в замкнутом и разомкнутом состоянии и определение ее устойчивости по критерию Гурвица. Определение перерегулирования в системе и динамической ошибки при входном воздействии. Значение выходного сигнала системы.
-
Цифровые частотные дискриминаторы, фильтры и генераторы опорного сигнала
Типы цифровых частотных дискриминаторов. Формирование дискриминационной характеристики. Цифровые фильтры. Дискретное интегрирование по методу прямоугольников. Цифровой управляемый генератор. Цифровые генераторы опорного сигнала. Реверсивный счетчик.
-
Краткие сведения о принципах действия дискретных и цифровых фильтров
Недостатки аналоговых фильтров. Для объяснения свойств и возможностей дискретных и цифровых фильтров удобно использовать отображение сигнала и его смеси с помехой в выборке отсчетов, взятых через дискретные интервалы времени, а также квантование отсчетов.
-
Аналоговый цифровой преобразователь с промежуточным буфером при высокой скорости поступления данных
Проектирование системы аналого-цифрового преобразования быстроизменяющегося аналогового сигнала в параллельный восьмиразрядный код, разработка ее структурной и принципиальной схемы. Основные элементы системы и порядок их взаимодействия, принцип работы.
-
Аналого-цифровая следящая система. Цифровые временные фазовые дискриминаторы
Достоинства и недостатки цифровых систем радиоавтоматики. Характеристика и классификация цифровых систем. Аналого-цифровая следящая система. Цифровые фазовые дискриминаторы. Дискретизация по времени и квантованию. Возникновение шумов квантования.
-
Цифровой генератор синусоидальных колебаний
Министерство образования РФ Южно-Российский Государственный Технический Университет (НПИ) ИНСТИТУТ ИИТУ КАФЕДРА СПЕЦИАЛЬНОСТЬ __ Промышленная электроника__
-
Исследование частотно-временных характеристик и структурных преобразований систем радиоавтоматики
Министерство образования и науки Украины Севастопольский национальный технический университет Кафедра Радиотехники Расчетно-графическое задание №1
-
Элементы систем регулирования цифровых радиопередатчиков
Направления развития систем связи. Использование радиопередающих устройств в сферах телекоммуникации, телевизионного и радиовещания, радиолокации, радионавигации. Цифровые элементы систем регулирования амплитуды колебаний и частотно-фазовые детекторы.
-
Расчет и моделирование цифрового фильтра
Изучение сущности цифровой фильтрации - выделения в определенном частотном диапазоне с помощью цифровых методов полезного сигнала на фоне мешающих помех. Особенности КИХ-фильтров. Расчет цифрового фильтра. Моделирование работы цифрового фильтра в MatLab.