Название: Обобщенные функциональная и структурная схемы радиотехнических следящих систем
Вид работы: реферат
Рубрика: Коммуникации и связь
Размер файла: 61.67 Kb
Скачать файл: referat.me-170779.docx
Краткое описание работы: БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ Кафедра РТС РЕФЕРАТ На тему: «Обобщенные функциональная и структурная схемы радиотехнических следящих систем»
Обобщенные функциональная и структурная схемы радиотехнических следящих систем
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра РТС
РЕФЕРАТ
На тему:
«Обобщенные функциональная и структурная схемы радиотехнических следящих систем»
МИНСК, 2008
Изучение основных типов систем позволяет определить общие функции и реализующие их функциональные узлы во всех рассмотренных выше системах и составить обобщенные функциональную и структурную схемы.
Обобщенная функциональная схема приведена на рис. 1 и состоит из дискриминатора Дис., фильтра, опорного (подстраиваемого) генератора ОГ.
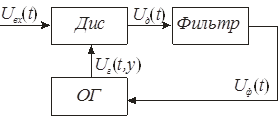
Рис.1. Обобщенная структурная схема радиотехнической следящей системы
На вход поступает смесь сигнала и шума
![]() .
.
Одним из параметров сигнала является задающее воздействие λ(t).
ОГ генерирует сигнал, одним из параметров которого является оценка отслеживающего параметра. Выходной сигнал ОГ зависит от назначения системы.
В результате нелинейного преобразования входного и опорного сигналов в дискриминаторе формируется напряжение, пропорциональное разности
![]() ,
,
где λ – задающее воздействие; y – управляемая величина.
Напряжение на выходе дискриминатора:
![]() ,
,
где F ( x ) – зависимость среднего значения напряжения на выходе дискриминатора от ошибки слежения, называемая дискриминационной характеристикой; ξ(t, x) – флюктуационная составляющая (результат нелинейного преобразования опорного и входного сигналов в дискриминаторе).
Форма дискриминационной характеристики приведена на рис. 2.
![]()
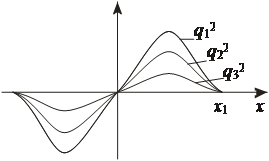
Рис.2. Дискриминационная характеристика
При малых значениях ошибки слежения х дискриминационная характеристика может быть аппроксимирована линейной зависимостью:
![]() ,
,
где
![]() при х
=0.
при х
=0.
S
д
– крутизна, которая зависит от типа дискриминатора, отношения сигнал/шум ![]() и других факторов.
и других факторов.
 ,
,
где Рс – мощность сигнала; σ2 ш – дисперсия шума.
![]() .
.
Крутизна дискриминационной характеристики зависит от амплитуды сигнала. Для исключения этой зависимости на входе производят ограничение либо автоматическую регулировку усиления ( АРУ). Дискриминационная характеристика имеет ограниченный раствор по оси х
. Если ошибка превышает граничную, обратная связь размыкается и система выходит из режима слежения (![]() ). Для ввода в синхронизм используется устройство ввода , обеспечивающее
). Для ввода в синхронизм используется устройство ввода , обеспечивающее ![]() .
.
Фильтр осуществляет сглаживание высокочастотных составляющих. Он может содержать интегрирующие звенья, его передаточная функция определяет качественные характеристики системы.
Обобщенная структурная схема приведена на рис. 3.
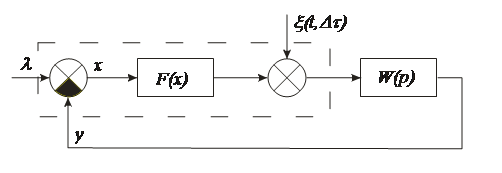
Рис. 3. Структурная схема радиотехнической следящей системы
Математический эквивалент дискриминатора включает элемент сравнения, нелинейное безинерционное звено F(x) и сумматор.
Звено W ( p ) определяется передаточной функцией опорного генератора и фильтра.
Характеристики составляющей шума ξ( t , x ) зависят от параметров дискриминатора и предшествующих цепей, отношения сигнал/шум, метода нормировки сигнала и шума по амплитуде, характера амплитудных флюктуаций сигнала.
Изменение ошибки во времени описывается нелинейным стохастическим дифференциальным уравнением
х( t ) + W ( p ) F ( x ) + ξ(t , x ) - λ ( t ) = 0.
Нелинейность уравнения определяется нелинейностью функцииF ( x ) и нелинейной зависимостью характеристик процесса ξ(t , x ) от ошибки слежения х . Стохастичность – наличием случайного процесса ξ(t , x ) и случайной составляющей задающего воздействияλ ( t ).
Если напряжение флюктуационной составляющей имеет равномерную спектральную плотность в полосе, значительно превышающей полосу пропускания следующих за дискриминатором цепей, шумξ(t , x ) можно считать белым и характеризовать его величиной спектральной плотности на нулевой частоте S ξ(w , x ) = S ξ(o , x ) , в общем случае зависящей от ошибки слежения. Зависимость спектральной плотности флюктуационной составляющей от ошибки слежения называется флюктуационной характеристикой дискриминатора.
Эквивалент дискриминатора можно существенно упростить при условии малости ошибки слежения х. При малой ошибке слежения дискриминационная характеристика линейна, а спектральную плотность флюктуационной составляющей можно принять с достаточным приближением не зависящей от ошибки слежения, то есть S ξ( о, x ) =S ξ(x ) , ξ(t , x ) = ξ(t ) . В этом случае следящая система описывается линейным дифференциальным уравнением с постоянными коэффициентами, что упрощает ее анализ.
Системы автоматической регулировки усиления (АРУ)
Системы автоматической регулировки усиления предназначены для стабилизации уровня выходного сигнала усилителя. Необходимость в АРУ обусловлена значительным динамическим диапазоном сигнала на входе приемника (60…100дБ), что без принятия мер по стабилизации уровня сигнала привело бы к перегрузке каскадов приемника и искажению полезной амплитудной модуляции сигнала.
Если на вход системы слежения поступает сигнал с таким динамическим диапазоном, то это приведет к увеличению коэффициента усиления контура и может служить причиной нарушения устойчивости.
Таким образом, система АРУ необходима для расширения динамического диапазона, чтобы избежать перегрузки каскадов и искажения амплитудной модуляции и обеспечить устойчивость следящей системы.
В качестве примера рассмотрим построение схемы АРУ с управлением по рассогласованию (рис. 4).
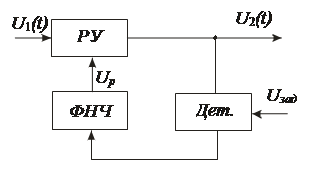
Рис.4. Функциональная схема АРУ
Выходное напряжение регулируемого усилителя РУ детектируется (Дет.) и через фильтр нижних частот ФНЧ поступает на РУ в виде регулирующего напряжения Up , которое изменяет крутизну усиления активного элемента, шунтирует нагрузку или управляет аттенюатором, в конечном итоге уменьшая уровень выходного сигнала РУ при его увеличении и увеличивая при уменьшении.
Например, при использовании транзистора в качестве активного элемента Up подается на базу транзистора (рис. 5) и, изменяя его крутизну (прямую проводимость), изменяет коэффициент усиления.
Напряжение задержки U зад используется для того, что бы повысить уровень стабилизируемого напряжения (рис. 6).
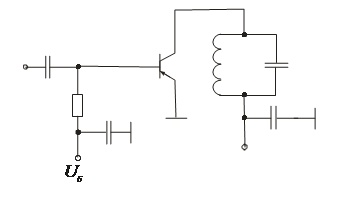
Рис.5
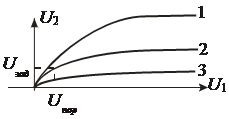
Рис.6. Зависимость выходного напряжения ![]() от входного
от входного![]() :
:
1 – АРУ отсутствует; 2 ─ U
з
= 0; 3 – U
з
![]()
АРУ начинает работать при превышении входным сигналом напряжения U 1 порогового напряжения (U ПОР ). Вариант построения детектора АРУ с задержкой приведен на рис. 7.
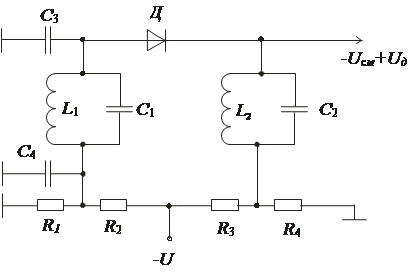
Рис.7. Схема детектора АРУ с задержкой
С помощью делителя R 1 R 2 формируется за напряжение U зад , поступающее на детектор Д.
Для исследования характеристик АРУ найдем уравнения, описывающие работу функциональных узлов системы, и составим структурную схему. Зависимость коэффициента усиления усилителя от регулирующего напряжения:
![]() , (1)
, (1)
где k 0 – величина коэффициента усиления при нулевом значении напряжения регулирования;
 ─ крутизна регулировочной характеристики;
─ крутизна регулировочной характеристики;
![]() (2)
(2)
 , (3)
, (3)
где k д – коэффициент передачи детектора.
Первое условие выражения (3) выполняется при ![]() , второе – при
, второе – при ![]() .
.
ФНЧ характеризуется своей передаточной функцией, поэтому напряжение на выходе ФНЧ определяется выражением:
![]() . (4)
. (4)
По полученным уравнениям можно построить структурную схему (рис. 8).
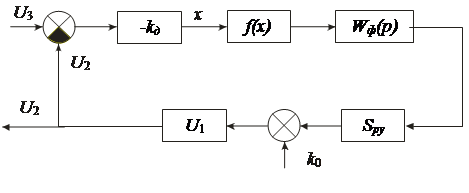
Рис. 8. Структурная схема АРУ
Здесь ![]()
![]()
Система АРУ является нелинейной системой с переменными параметрами, что делает сложной задачей ее анализ. При оценке отдельных качественных характеристик производят соответствующие упрощения.
ЛИТЕРАТУРА
1. Коновалов. Г.Ф. Радиоавтоматика: Учебник для вузов. – М.: Высш.шк., 2000.
2. Радиоавтоматика: Учеб. пособие для вузов./ Под ред. В.А. Бесекерского.- М.: Высш. шк., 2005.
3..Первачев. С.В Радиоавтоматика: Учебник для вузов.- М.: Радио и связь, 2002.
4. Цифровые системы фазовой синхронизации/ Под ред. М.И. Жодзишского – М.: Радио, 2000
Похожие работы
-
Системы с прерывистым входным сигналом. Математическое описание дискретных систем
Использование импульсного сигнала в качестве носителя информации (сканирование диаграммы направленности или переключение процесса слежения с одного объекта на другой и т.д.). Функциональные схемы следящих систем при наличии прерываний входного сигнала.
-
Описание систем радиоавтоматики
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ кафедра радиотехнических систем РЕФЕРАТ на тему: «Описание систем РАдиоавтоматики»
-
Колебательные, инерционно-дифференцирующие и интегрирующие звенья радиотехнических следящих систем
Частота затухающих колебаний. Переходная и логарифмическая амплитудно-частотная характеристики колебательного звена. Определение постоянной времени идеального дифференцирующего звена. Характеристики форсирующего звена, идеального интегрирующего звена.
-
Лабораторная работа 1 по Цифровым и Микропроцессорным устройствам
Министерство общего и профессионального образования Российской Федерации Южно-Уральский Государственный Университет Кафедра Радиотехнических Систем
-
Устойчивость радиоэлектронных следящих систем
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ Кафедра РТС РЕФЕРАТ На тему: «Устойчивость радиоэлектронных следящих систем»
-
Использование дифференциальных уравнений, передаточных и частотных передаточных функций
Использование дифференциальных уравнений, передаточных функций, переходной и весовой функций, частотных передаточных функций. Устойчивые и неустойчивые системы. Комплексный коэффициент передачи. Обратное преобразование. Гармоническое входное воздействие.
-
Анализ случайных процессов в линейных системах радиоэлектронных следящих систем
Случайные процессы с нормальным законом распределения, которые определяются математическим ожиданием и корреляционной функцией. Определение статистических характеристик случайных процессов в линейных системах. Эквивалентная шумовая полоса следящих систем.
-
Обобщенные оптимальные и квазиоптимальные дискриминаторы. Дискриминационная характеристика
Сигнал ошибки на выходе оптимального дискриминатора - информация о величине и знаке рассогласования. Схемы дискриминаторов сигнала ошибки измерителей дальности, скорости, наклона и кривизны волнового фронта и других параметров. Обобщенные схемы.
-
Логарифмические частотные характеристики и передаточные функции радиотехнической следящей системы
Логарифмические частотные характеристики. Передаточные функции следящих систем. Передаточные функции в обобщенной структурной схеме радиотехнической следящей системы. Типовые динамические звенья. Логарифмическая амплитудно-частотная характеристика.
-
Разработка СУ для двухсцепного манипулятора
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ОТКРЫТЫЙ УНИВЕРСИТЕТ ФАКУЛЬТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ Кафедра управления и информатики в технических системах