Название: Свойства полиспастов
Вид работы: лабораторная работа
Рубрика: Промышленность и производство
Размер файла: 177.18 Kb
Скачать файл: referat.me-299209.docx
Краткое описание работы: Назначение, принцип работы, основные конструктивные разновидности и составляющие элементы полиспастов. Основные расчетные зависимости. Сопротивление за счет жесткости в канатах при огибании блоков. Опоры скользящего трения. Учет вредных сопротивлений.
Свойства полиспастов
Федеральное агентство по образованию
ГОУ ВПО БрГУ
Кафедра СДМ и О
Лабораторная работа № 4
Полиспасты
Выполнил:
Ст. группы СДМ 03-1
А.А. Килибеев
Проверил:
Преподаватель
А.Ю. Кулаков
Братск 2006
Цель работы: изучить назначение, принцип работы, конструктивные разновидности и составляющие элементы полиспастов, а также основные расчетные зависимости для них.
Полиспасты
Прежде, чем перейти к описанию устройства полиспастов и их назначению, необходимо кратко остановиться на описании блоков, входящих в конструкции различных полиспастов и являющихся их основными элементами.
В полиспастах используют неподвижные (или направляющие) и подвижные блоки.
Неподвижными называют блоки, оси которых помещены в неподвижно закрепленных опорах и не могут перемещаться в пространстве. Эти блоки используют лишь для изменения направления движения гибкого элемента (каната, цепи), нагруженного на одной ветви весом поднимаемого груза Q, а на другой ветви – тяговым усилием P![]() (рис.1)
(рис.1)
Скорость V![]() , которую развивает рабочий на гибком элементе при использовании неподвижным блоком, равна скорости V поднимаемого груза, а путь, проходимый за единицу времени тяговой силой P
, которую развивает рабочий на гибком элементе при использовании неподвижным блоком, равна скорости V поднимаемого груза, а путь, проходимый за единицу времени тяговой силой P![]() , равен пути проходимому грузом Q. Тяговое усилие без учета сопротивления в блоке определится из равенства:
, равен пути проходимому грузом Q. Тяговое усилие без учета сопротивления в блоке определится из равенства:
P![]() =Q
=Q
Однако в следствии сопротивления гибких органов (канатов, цепей) изгибу и трения в подшипниках для работы необходимо обеспечить соотношение, когда :
P![]() > Q.
> Q.
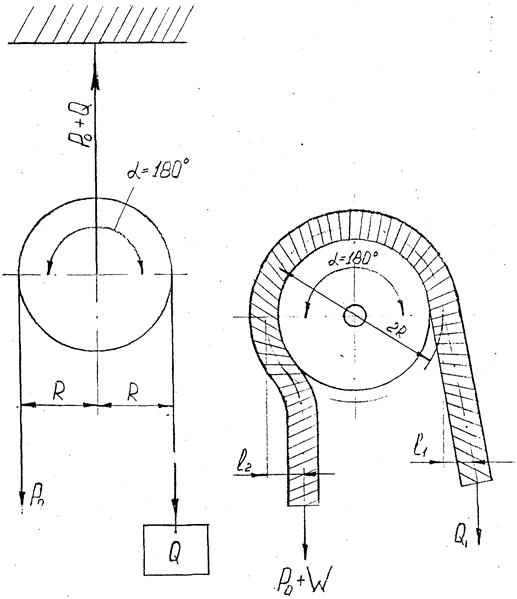
Сопротивление за счет жесткости в канатах при огибании блоков проявляется, когда канат, набегая на блок, не сразу принимает его кривизну, а сначала отклоняется от него на величину l![]() во внешнем направлении (рис.2);сбегая с блока, он отклоняется на величину l
во внешнем направлении (рис.2);сбегая с блока, он отклоняется на величину l![]() во внутреннем направлении. Это приводит при набегании каната на блок к увеличению плеча силы Q, а при сбегании каната к уменьшению плеча силы P
во внутреннем направлении. Это приводит при набегании каната на блок к увеличению плеча силы Q, а при сбегании каната к уменьшению плеча силы P![]() . Очевидно, что при работе (без учета трения в опорах), для преодоления вредного сопротивления жесткости каната необходимо увеличить силу P
. Очевидно, что при работе (без учета трения в опорах), для преодоления вредного сопротивления жесткости каната необходимо увеличить силу P![]() на некоторую величину W, откуда сила, действующая на сбегающую ветвь каната, будет равна сумме P
на некоторую величину W, откуда сила, действующая на сбегающую ветвь каната, будет равна сумме P![]() +W (см.рис.2).
+W (см.рис.2).
Пренебрегая трением блока в опорах, для данного случая имеем:
Q(R+l![]() ) = ( P
) = ( P![]() +W)(R-l
+W)(R-l![]() )
)
Откуда:

Принимая ![]() и одновременно отбрасывая в правой части равенства последний сомножитель, мало отличающийся от единицы, запишем:
и одновременно отбрасывая в правой части равенства последний сомножитель, мало отличающийся от единицы, запишем:
![]() (1)
(1)
О коэффициенте ![]() , характеризующем жесткость каната, в настоящее время нет достаточно надежных данных, определяющих его в зависимости от диаметров каната и блока, типа свивки, жесткости проволоки, величин натяжения каната, срока службы; поэтому при точных расчетах исходя из экспериментальных данных. Выше мы рассматривали условия работы блока с учетом потерь на сопротивлении жесткости, тогда как в действительности должно учитываться и сопротивление в опорах оси блока. Для приближенных расчетов в среднем принимают
, характеризующем жесткость каната, в настоящее время нет достаточно надежных данных, определяющих его в зависимости от диаметров каната и блока, типа свивки, жесткости проволоки, величин натяжения каната, срока службы; поэтому при точных расчетах исходя из экспериментальных данных. Выше мы рассматривали условия работы блока с учетом потерь на сопротивлении жесткости, тогда как в действительности должно учитываться и сопротивление в опорах оси блока. Для приближенных расчетов в среднем принимают ![]() ε = 1,02 – 1,05.
ε = 1,02 – 1,05.
Обозначив через К – коэффициент всех сопротивлений блока вращению, а через P – тяговое усилие с учетом сопротивления от жесткости каната и трения в подшипниках, запишем равенство:
P = KQ
Следовательно, к.п.д. блока будет:
![]()
полиспаст блок опора трение
Таким образом, ясно, что для гибкого элемента, при работе его на блоке, сбегающая ветвь всегда натянута сильнее, чем его набегающая ветвь, а величина коэффициента (К) всегда будет больше единицы и является обратной величине к.п.д. неподвижного блока.
Среднее значение коэффициентов К и h в зависимости от угла обхвата α (см.рис.1), конструкции опор и соотношений диаметра каната (d) с диаметром блока (Дб) при расчетах принимают:
1. Стальной канат (опоры скользящего трения):
При Дб <30 d
к h
А) при α = 180![]() ……. 1,05 0,95
……. 1,05 0,95
Б) при α = 90![]() ……… 1,04 0,96
……… 1,04 0,96
При Дб > 30 d
В) при α = 180![]() ……. 1,04 0,96
……. 1,04 0,96
Г) при α = 90![]() ……… 1,03 0,97
……… 1,03 0,97
Опоры в подшипниках качения:
А) при α = 180![]() ……. 1,02 0,98
……. 1,02 0,98
Б) при α = 90![]() ……… 1,015 0,985
……… 1,015 0,985
Переходя к подвижным блокам, также применяемым в полиспастах, следует указать, что оси их (в отличии от неподвижных блоков) вместе с опорами могут перемещаться в пространстве.
Эти блоки разделяют на две группы: для выигрыша в силе и выигрыша в пути.
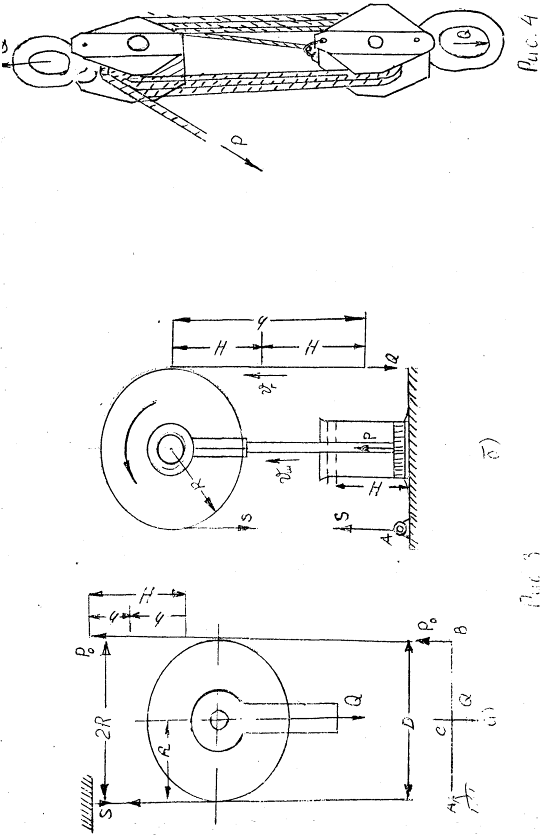
Блок для выигрыша в силе показан на рис.3,а
Подвижный блок можно рассматривать как рычаг, вращающийся вокруг точки А (см.рис.3, а). Точка С. Соответствует центру блока; к ней подвешен груз Q. В точке В рычага приложена движущая сила P![]() .
.
Составляя уравнение моментов (без учета вредных сопротивлений), получим:
P![]() 2R = QR
2R = QR
Откуда:
P![]() =
= ![]()
Следовательно, если пренебречь трением ролика об ось и сопротивлением изгиба троса, потребное тяговое усилие при применении подвижного блока будет в два раза меньше веса поднимаемого груза. Однако в данном случае скорость подъема груза будет в два раза меньше, чем скорость движения тянущего конца.
В данном случае, если через Н обозначить путь, проходимый движущей силой P![]() , а через h – путь, проходимый грузом Q (см.рис.3,а) в единицу времени, то будет иметь место равенство:
, а через h – путь, проходимый грузом Q (см.рис.3,а) в единицу времени, то будет иметь место равенство:
C = 2h,
т.е. за одно и то же время путь, пройденный грузом будет в два раза меньше пути, пройденного движущей силой, следовательно, и скорость движущей силы будет вдвое больше скорости подъема груза.
С учетом жесткости каната и сопротивления в опорах оси блока:
![]() ;
; ![]() (3)
(3)
Где S – усилие в набегающей ветви каната, а P – тяговое усилие с учетом всех сопротивлений в блоке; из предыдущих величин значения к.п.д. для подвижного блока будет:
![]()
![]() (4)
(4)
Подвижный блок для выигрыша в скорости ( рис.3,б) отличается от блока для выигрыша в силе приложением к оси его движущей силы P, в то время как груз Q подвешен на свободной ветви каната ( так называемый обращенный блок ). В этом случае путь H, проходимый силой P, будет в два раза меньше, чем путь h, проходимый грузом Q (см.рис.3,б), откуда
![]()
Следовательно , и скорость подъема груза Q будет в два раза больше скорости подъема силой P самого груза блока.
Без учета вредных сопротивлений в блоке P![]() = 2Q
= 2Q
С учетом всех сопротивлений : S=kQ; P=S+Q=k Q+Q=Q(k+1);
![]() (5)
(5)
Если соединить по определенной схеме несколько подвижных и неподвижных блоков, закрепленных в обоймах, огибаемых гибким элементом (канатом, цепью), то такое устройство называется полиспастом.
Полиспасты могут быть самостоятельными грузоподъемными устройствами (рис.4) или входить составным элементом в грузоподъемные машины.
Так же как подвижные блоки, полиспасты делят на используемые для выигрыша в силе и для выигрыша в скорости. Первые нашли широкое применение в практике монтажных и строительных работ при подъеме и передвижении различных грузов, вторые применяются значительно реже и главным образом в гидравлических и пневматических подъемниках.
В зависимости от принятых схем расположения блоков и огибания их гибким элементом различаются полиспасты: кратные, потенциальные и сложные. В нашем изложении ограничимся рассмотрением кратных полиспастов.
Кратностью полиспастов (обозначаемой числом m) называется число ветвей гибкого элемента полиспаста, на которые распределяется вес поднимаемого груза.
В кратных полиспастах (рис.5,а), где составляющие их блоки смонтированы в двух обоймах – неподвижной 1, и подвижной 2, а гибкий элемент, прикрепленный к обойме 1, последовательно огибает блоки, можно определить отношение скорости движения свободного конца гибкого элемента к скорости подъема подвижной обоймы 2 с грузом по формуле:
V![]() = mv,
= mv,
Где: V![]() - скорость свободного конца гибкого элемента.
- скорость свободного конца гибкого элемента.
V – скорость подъема груза.
Одновременно зависимость между путями, пройденными за единицу времени свободным концом гибкого элемента, и поднимаемым грузом (рис.5,а) будет:
H = mh
Числом m, но в обратной зависимости определяется в кратных полиспастах отношение между весом поднимаемого груза Q и натяжением свободного конца гибкого элемента – тягового усилия P![]() ;
;
В кратных полиспастах, используемых для выигрыша в силе, поднимаемый груз подвешивается к подвижной обойме, а тяговое усилие прикладывается к свободной ветви гибкого элемента, сбегающего с последнего неподвижного блока (рис.5,а) или с последнего подвижного блока (рис.5,б).
Расчет натяжения гибких элементов в полиспастах, исходит из следующих положений: груз Q, в величину которого входит и вес подвижной обоймы с блоками, а также и грузозахватные детали в рассматриваемом нами случае (рис.5,а), подвешен на 4 ветвях гибкого элемента. Пренебрегая жесткостью каната и сопротивлением трения, можно было бы написать, что натяжение каждой ветви:
![]()
В действительности же эти натяжения, как упоминалось ранее, не могут быть одинаковыми, причем наименьшее натяжение S![]() будет ближайшим к точке закрепления гибкого элемента, а для остальных его ветвей натяжения будут соответственно равны:
будет ближайшим к точке закрепления гибкого элемента, а для остальных его ветвей натяжения будут соответственно равны:
![]() ;
; ![]() и
и ![]()
Независимо от количества ветвей гибкого элемента, на которых подвешен груз Q сумма натяжения ветвей (обозначенных через S![]() S
S![]() S
S![]() S
S![]() ) должна быть равна Q. Руководствуясь этим положением и представляя все ветви гибкого элемента перерезанными, составим уравнение равновесия для первой группы полиспастов (рис.5,а), когда свободная ветвь гибкого элемента сбегает с неподвижного блока:
) должна быть равна Q. Руководствуясь этим положением и представляя все ветви гибкого элемента перерезанными, составим уравнение равновесия для первой группы полиспастов (рис.5,а), когда свободная ветвь гибкого элемента сбегает с неподвижного блока:
![]()
В этом уравнении выражение в скобках является геометрической прогрессией. Суммируя это выражение получают:
![]()
Тогда минимальное натяжение в ветви полиспаста:
![]()
Путь, проходимый силой P при подъеме груза Q на высоту h, определяется равенством : H = mh
Сила P![]() при
при ![]() f = 0 k = 1 : f – коэффициент трения в опорах.
f = 0 k = 1 : f – коэффициент трения в опорах.
![]()
к.п.д. полиспаста:
![]()
Для второй группы полиспастов (рис.5,б), когда свободная ветвь гибкого элемента сбегает с подвижного блока эти соотношения примут вид:
![]()
![]() ;
; ![]() ;
; ![]() ;
;
В кратных полиспастах, предназначенных для выигрыша в скорости, их устройство не отличается от кратных полиспастов для выигрыша в силе, но в этом случае действующее усилие P прикладывается к обойме, где смонтированы подвижные блоки, а груз подвешивается к свободному концу гибкого элемента. Схемы этих полиспастов сохраняются такими же, как изображено на рис.5,а и 5,б, причем в них меняются местами силы P и Q и соответственно меняется направление вращение блоков, обуславливающее соответствующую перегруппировку сбегающих и набегающих концов ветвей гибкого элемента. Как упоминалось ранее, эти полиспасты используются для гидравлических и пневматических подъемников с целью получения большей скорости движения грузов, чем скорость движения поршней.
Для механизмов подъема крановых лебедок с электроприводом очень часто применяют сдвоенные кратные полиспасты, обеспечивающие строго вертикальный подъем груза и его устойчивое положение. Эти полиспасты поднимают груз двойным количеством ветвей каната по сравнению с простым полиспастом. На рис.5,в дана схема сдвоенного кранового полиспаста для выигрыша в силе. Концы каната полиспаста закрепляют на барабане с правой и левой нарезками Для перехода каната с одной половины сдвоенного полиспаста на другую смонтирован уравнительный блок (а), который одновременно служит для выравнивания ветвей по длине при неравномерной вытяжке. Этот полиспаст, имеющий четыре ветви, применяют для кранов грузоподъемностью до 25т. Применяются сдвоенные полиспасты с восьмью ветвями для подъема грузов до 75т. Для грузов свыше 100т. Используют полиспасты с 12 несущими ветвями.
Похожие работы
-
Подъем двухконсольной тележки
СОДЕРЖАНИЕ I. Расчёт механизма подъёма двухконсольной тележки 1. Выбор каната и барабана 1.1 Грузоподъемная сила 1.2 КПД полиспаста 1.3 Наибольшее усилие в ветви каната, набегающего на барабан при подъеме груза
-
Проектирование подъёмного механизма
Московский Государственный Технический Университет им. Н.Э. Баумана Калужский филиал Факультет: Конструкторско-механический (КМК) Кафедра: «Деталей машин и подъёмно-транспортного оборудования» КЗ-КФ
-
Гос. экзамен билеты. Машиностроение
Министерство образования и науки Республики Казахстан Машиностроительный факультет Кафедра «Технология машиностроения» Тема: Билеты государственного экзамена
-
Исследование косого изгиба балки
Экспериментальное определение максимальных прогибов и напряжений при косом изгибе балки и их сравнение с аналогичными расчетными значениями. Схема экспериментальной установки для исследования косого изгиба балки. Оценка прочности и жесткости балки.
-
Такелажное дело
Особенности выполнения такелажных работ с использованием лебедок, домкратов, другого такелажного оборудования. Испытание грузоподъёмных устройств. Погрузка различного оборудования и грузов. Различные направления перемещения грузов. Перенос грузов вручную.
-
Конструкция блоков, звёздочек и барабанов подъёмно-транспортных машин
Применение блоков для отклонения направления канатов и цепей. Звездочки - блоки с фасонной поверхностью для работы со сварными и пластинчатыми цепями. Преобразование вращательного движения в поступательное перемещение груза. Расчет прочности барабанов.
-
Оценка несущей способности основания опоры моста
1. Исходные данные для проектирования Описание местных условий строительства и характеристики сооружения. В соответствии с заданием необходимо дать оценку несущей способности основания фундамента мелкого заложения промежуточной пойменной опоры моста. Схема опоры представлена на рис. 1. Размеры опоры моста представлены в табл. 1.
-
Расчет электрической тали
СОДЕРЖАНИЕ 1. РАСЧЕТ ЭЛЕКТРОДВИГАТЕЛЯ 1.1 ПРОДОЛЖИТЕЛЬНОСТЬ ВКЛЮЧЕНИЯ 1.2 ГРУЗОПОДЪЕМНАЯ СИЛА 1.3 МОЩНОСТЬ ЭЛЕКТРОДВИГАТЕЛЯ 1.4 ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ
-
Расчет механизма подъема тележки консольной с боковыми роликами
Выбор каната и барабана: грузоподъемная сила, КПД полиспаста, наибольшее усилие в ветви каната, набегающего на барабан при подъеме груза. Обоснование выбора типа электродвигателя: продолжительность включения, статическая мощность и угловая скорость.
-
Мостовые краны
Введение Кранами называются грузоподъемные устройства, служащие для вертикального и горизонтального перемещения грузов на большие расстояния. По особенностям конструкций, связанным с назначением и условиями работы, краны разделяются на мостовые, портальные, козловые, башенные и др. В цехах предприятий электромашиностроения наибольшее распространение получили мостовые краны, с помощью которых производится подъем и опускание тяжелых заготовок, деталей и узлов машин, а также их перемещение вдоль и поперек цеха.