Название: Разработка робототехнического комплекса токарной обработки вставки, пальца и оси сателлита
Вид работы: курсовая работа
Рубрика: Промышленность и производство
Размер файла: 76.91 Kb
Скачать файл: referat.me-300093.docx
Краткое описание работы: Разработка технологического процесса изготовления деталей. Расчет и проектирование транспортера-накопителя и разработка наладок размещения на нем заготовок. Разработка наладок при обработке заготовок на токарном оборудовании. Расчет захватного устройства.
Разработка робототехнического комплекса токарной обработки вставки, пальца и оси сателлита
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
ТОЛЬЯТТИНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
КАФЕДРА “ТЕХНОЛОГИЯ МАШИНОСТРОЕНИЯ”
Курсовая работа по дисциплине “Автоматизация машиностроительного производства ”
на тему
“ Разработка робототехнического комплекса токарной обработки вставки, пальца и оси сателлита”
Студент Быков Р.Н.
Группа М-501
Преподаватель Бойченко О.В.
ТОЛЬЯТТИ 2003-2004
Аннотация
Разработка робототехнического комплекса токарной обработки вставки, пальца и оси сателлита. К.р. /Быков Р.Н.– Тольятти.: ТГУ, 2003.
Разработан технологический процесс изготовления детали с выбором заготовок. Выбран промышленный робот, транспортер-накопилель и захватное устройство для обслуживания токарных операций технологического процесса. Произведен расчет захватного устройства и циклограмм работы оборудования, входящего в робототехнический комплекс. Выполнена компоновка средств автоматизации загрузки.
Расчетно-пояснительная записка на стр.
Графическая часть – чертежа А1.
Чертеж детали. 0,125
Наладки токарной обработки. 0,5
Сборочный чертеж транспортера-накопителя. 1
Сборочный чертеж захватного устройства.
Общий вид РТК. 1
План
Введение
1. Выбор заготовок
2. Разработка технологического процесса изготовления деталей
3. Разработка теоретических схем базирования, крепления заготовок на станке, в захватном устройстве и на транспортере накопителе
4. Разработка наладок при обработке заготовок на токарном оборудовании
5. Расчет и проектирование транспортера-накопителя и разработка наладок размещения на нем заготовок
6. Выбор промышленного робота для использования в РТК токарной операции
7. Расчет захватного устройства и разработка конструкции его размещения на руке промышленного робота
8. Компоновка средств автоматизации загрузки и транспортной системы совместно с используемым токарным оборудованием
9. Разработка циклограмм работы оборудования, входящего в РТК
Заключение
Список используемой литературы
Введение
Машиностроение – одна из важнейших отраслей, дающих человеку блага жизни и обеспечивающих технически другие отрасли. Для повышения уровня благ главной задачей должно стать всемерное повышение эффективности производства, но это не может быть осуществимо без комплексной автоматизации и механизации. Вот поэтому так много внимания уделяется переходу от создания и внедрения отдельных производственных машин и технологического оборудования к разработке, производству и массовому применению высокоэффективных комплексов автоматических машин и оборудования. При этом особую важность приобрели автоматизация и механизация не только основных, но и вспомогательных, транспортных и складских операций с помощью легко переналаживаемых технических средств, к которым относятся промышленные роботы.
Промышленные роботы, обеспечивая автоматизацию отдельных процессов и операций, связывают их в системы автоматически работающих производственных машин-автоматов, достаточно эффективных как в массовом, так и в мелкосерийном производствах.
Применение промышленных роботов улучшает использование производственных фондов, повышая рентабельность и фондоотдачу производства.
Важной особенностью промышленных роботов является не только высокая степень универсальности большинства из них, но и способность быстро переналаживаться на выполнение новых операций или иной работы, что особенно важно в условиях современного гибкого производства, для которого характерны большая номенклатура и частая смена выпускаемых изделий.
Поэтому целью данного курсового проектирования является овладение навыками выбора и расчета средств автоматизации и механизации технологических процессов.
1. Выбор заготовок
Выбор заготовок для будущих деталей является одним из важнейших этапов проектирования технологического процесса и всего связанного с этим. От выбора заготовок зависят качество и стоимость операций технологического процесса, выбранная оснастка и инструмент, а также средства обслуживания операции.
В нашем случае, учитывая среднесерийный тип производства, среднюю сложность изготовления деталей, незначительность переходов цилиндрических шеек, оптимальным видом заготовок для всех деталей, участвующих в курсовом проектировании, являются заготовки из проката обычной точности.
Данные по характеристикам прутков в табл.62[1]
Вставка – пруток Æ60![]() .
.
Палец – пруток Æ60![]() .
.
Ось сателлита – пруток Æ45![]()
2. Разработка технологического процесса изготовления деталей
На основе выбранных заготовок разработаем для каждой детали технологический процесс. Технологические процессы будем разрабатывать укрупнено.
Для разработки технологических процессов изготовления деталей будем руководствоваться рекомендациями [1], [2], [3]. Данные по разработке технологических процессов занесем в таблицу 2.1.
Таблица 2.1
Технологические процессы изготовления деталей
| Схема | Технологический переход | Обрабатываемые поверхности | |
| Вставка | 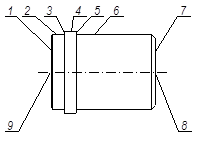 |
00 – заготовительная (прокат) | отрезка |
| 10 – фрезерно-центровальная | 8,9 | ||
| 20 – токарная | 1,2,3,5,6,7 | ||
| 30 – термообработка | 1,2,3,4,5,6,7,8,9 | ||
| Палец |
|
00 – заготовительная (прокат) | отрезка |
| 10 – фрезерно-центровальная | 1,8,14,15 | ||
| 20 – токарная | 2,3,4,5,7,9,10,11,12 | ||
| 30 – сверлильная | 13 | ||
| 40 – резьбонарезная | 2 | ||
| 45 – термообработка | 2,3,4,5,79,10,11,12, 13 | ||
| 50 – круглошлифовальная | 5,7 | ||
| Ось сателлита | 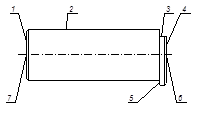 |
00 – заготовительная (прокат) | отрезка |
| 10 – фрезерно-центровальная | 1,4,6,7 | ||
| 20 – токарная | 2,5,6 | ||
| 25 – термообработка | 2,3,5,6 | ||
| 30 - круглошлифовальная | 2,6 | ||
| 40 – фрезерная | 3 |
3. Разработка теоретических схем базирования, крепления заготовок на станке, в захватном устройстве и на транспортере-накопителе
Разработаем теоретические схемы базирования, крепления заготовок на станке, в захватном устройстве и на транспортере-накопителе. Будем руководствоваться принципами постоянства и единства технологических и измерительных баз, а также совмещение технологических баз с конструкторскими. Для разработки теоретических схем базирования, крепления заготовок на станке, в захватном устройстве и на транспортере-накопителе будем пользоваться рекомендациями [4], [5]. Данные по разработке теоретических схем базирования, крепления заготовок занесем в таблицу 3.1.
Таблица 3.1
Теоретические схемы базирования, крепления заготовок на станке, в захватном устройстве и на транспортере-накопителе
| Деталь | Теоретическая схема базирования | Теоретическая схема базирования в захватном устройстве | Теоретическая схема базирования на транспортере-накопителе |
| I установ | На I установ | На станок | |
| Вставка | 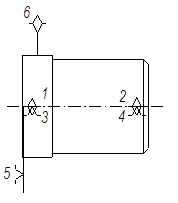 |
 |
 |
| II установ | На II установ | Со станка | |
 |
 |
 |
|
| На транспорт | |||
 |
|||
| Палец | I установ | На I установ | На станок |
 |
 |
 |
|
| II установ | На II установ | Со станка | |
 |
 |
 |
|
| На транспорт | |||
 |
|||
| I установ | На I установ | На станок | |
 |
 |
 |
|
| Ось сателлита | II установ | На II установ | Со станка |
 |
 |
 |
|
| На транспорт | |||
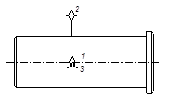 |
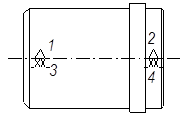
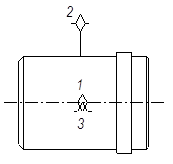
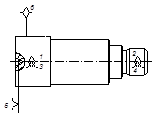
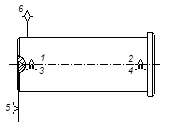
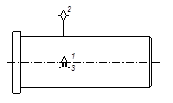
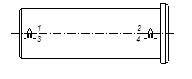
4. Разработка наладок при обработке заготовок на токарном оборудовании
На основе разработанных технологических процессов и теоретических схем базирования заготовок на станке разработаем наладки при обработке заготовок (см. приложение). При разработке наладок будем руководствоваться рекомендациями [1], [6].
Учитывая конструктивные параметры и технические требования обрабатываемых деталей, и теоретические схемы базирования, из таблиц [6] выберем тип станка и тип токарного трехкулачкового механизированного патрона. В нашем случае для токарной операции подходят полуавтомат токарный патронно-центровой с ЧПУ модели 1725РФ3 и патрон токарного механизированного типа ПЗКП-315.Ф8.95. Выбранный нами станок обеспечивает требуемые режимы резания и точность обработки. Патрон типа ПЗКП-315.Ф8.95 обеспечивает центрирование заготовок самоустанавливающимися кулачками и дополнительно самоустановку кулачков по заготовке при обработке ее в центрах. Зажим и разжим заготовок в патроне производится от гидравлического привода, устанавливаемого на заднем конце шпинделя станка. Также выбранный нами патрон оснащен плавающими центрами.
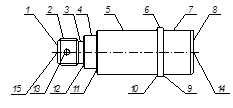
На наладке покажем вид в плане и вид сбоку детали в патроне на станке, захватное устройство относительно детали, а также реализацию теоретической схемы базирования и закрепления на токарном станке с обозначением опорных центров, прижимов патрона и губок захватного устройства. Проставим основные размеры детали и размеры, определяющие координатное положение губок захватного устройства. Инструмент, резцовые блоки и суппорты на схеме наладки не показываем. Также приведем на схеме наладки циклы координатного перемещения детали при установке и смене деталей на станке с помощью захватного устройства.
5. Расчет и проектирование транспортера-накопителя и разработка наладок размещения на нем заготовок
На основе конструктивных параметров обрабатываемых деталей, техпроцесса их обработки и выбранного токарного станка с ЧПУ по материалам [1] выберем модель и типоразмер тактового транспортера-накопителя. Обрабатываемые детали практически одного типоразмера и их длины лежат в пределах 76…133 мм, а масса не превышает 1,4кг. Поэтому целесообразно выбрать пластины с размерами 150×225 с грузоподъемностью 10 кг. Учитывая такт обработки деталей и возможность непрерывной работы транспортера-накопителя без смены на нем деталей оператором в течение одного часа, выбираем транспортер-накопитель с 24 пластинами. На основе этих данных выбираем модель тактового транспортера-накопителя – СТ 150. Технические характеристики занесем в таблицу 5.1.
Таблица 5.1
Технические характеристики транспортера-накопителя
| Модель тактового транспортера-накопителя | Габаритные размеры транспортера-накопителя | Число пластин | Грузоподъемность одной пластины, кг | Размеры пластины | |||
| L | B | H | А×Б | l×b | |||
| СТ 150 | 2250 | 650 | 850 | 24 | 10 | 150×225 | 150× 150 |
Разработаем базирующие и установочные регулируемые и нерегулируемые элементы на пластине для размещения и базирования заготовок и деталей. Учитывая серийность производства и возможность быстрой переналадки на изготовление других деталей, будем использовать в качестве установочного нерегулируемого элемента базовую плиту, по Т-образным пазам которой будут перемещаться базирующие призмы. Привод, перемещающий призмы – механический – винт-гайка. Такое приспособление обеспечивает размещение обработанных деталей и их заготовок, а также возможность предварительной регулировки и переналадки. Вид транспортера накопителя и его составляющих представлен на чертежах (см. приложение).
6. Выбор промышленного робота для использования в РТК токарной операции
В данной курсовой работе мы принимаем, что автоматизация операции загрузки и смены обрабатываемых деталей в условиях серийного производства обеспечивается с применением промышленного робота в составе РТК. На основе анализа технологического процесса, конструктивных параметров деталей, разработанных схем наладок выберем промышленный робот. В нашем случае будет удобным использовать промышленный робот СМ160Ф2.05.01 [1]. Данный робот обладает всеми нужными для автоматизации операций в нашем проектировании параметрами и функциями. Выбранный нами робот обладает пятью степенями свободы, что позволяет осуществлять захват заготовки в любом месте максимально приближенным к центру тяжести заготовки (см. пункт 7), т.е. является широко применимым, что позволяет использовать его в среднесерийном производстве с нередкой сменой ассортимента выпускаемых деталей. Данный робот имеет возможность обслуживать несколько станков, что приемлемо для серийного производства, где штучное время немалое, и оно будет обеспечивать возможность многостаночного обслуживания роботом. Грузоподъемность робота позволяет перемещать детали до 160 кг. Наличие двух рук робота дает возможность сократить время обслуживания практически в два раза. Также робот обладает достаточно высокой точностью позиционирования, большим диапазоном и высокой скоростью перемещений, как угловых, так и линейных. Технические характеристики робота занесем в таблицу 6.1
Таблица 6.1
Технические характеристики робота СМ160Ф2.05.01
| Техническая характеристика | Численное значение |
| Грузоподъемность суммарная/ на одну руку, кг | 320/160 |
| Число рук/ захватов на руку | 2/1 |
| Число степеней подвижности | 5 |
| Тип привода | Гидравлический |
| Система управления | Позиционная |
| Число программируемых координат | 3 |
| Способ программирования перемещений | Обучение |
| Погрешность позиционирования, мм | ±0,5 |
| Наибольший вылет руки, мм | 1800 |
Линейные перемещения/ скорость перемещений мм, мм/с: Горизонтальные Вертикальные |
8900/0,8 970/0,3 |
Угловые перемещения/ скорость перемещений, …º, º/с |
60/15 |
| Масса, кг | 6500 |
7. Расчет захватного устройства и разработка конструкции его размещения на руке промышленного робота
Для разработки чертежа захватного устройства необходимо произвести расчет захватного устройства. Вследствие того, что заготовки до и после обработки на станке имеют разные массу и конфигурацию, расчет необходимо производить для каждого этапа обработки, что является трудоемким и длительным процессом. Поэтому в данном случае мы произведем расчет для заготовок, которые еще не прошли токарную обработку (которые загружают с транспортера накопителя), но все неточности и погрешности мы учтем при введении коэффициента, учитывающего увеличение нагрузки Кд .
Расчет захватного устройства произведем в четыре этапа, используя данные [1], [7].
Произведем расчет и реакций в губках.
Определим точку центра тяжести для каждой заготовки по формуле:
 , (7.1)
, (7.1)
где сi – точка центра тяжести простой фигуры,
mi – масса простой фигуры,
n – количество простых фигур, на которые разбита заготовка.
Данные занесем в таблицу 7.1.
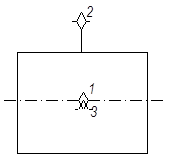
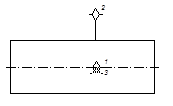
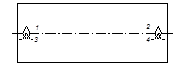
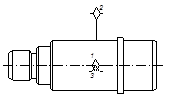
Определим точки приложения сил и реакции в губках для каждой детали (Рис.7.1): точки приложения сил и реакции в губках
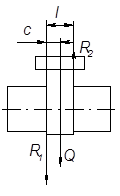
Рис.7.1
Рассчитаем нагрузки и реакции в губках по формулам:
 , (7.2)
, (7.2)
где l= – ширина губок,
с – расстояние от центра тяжести заготовки до ближайшей реакции,
Q – вес заготовки (mg).
Данные занесем в таблицу 7.1.
Рассчитаем силы воздействия губок на деталь.
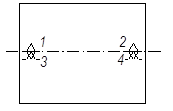
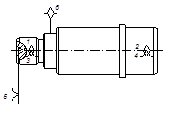
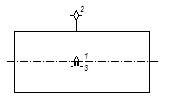
Составим схему сил, действующих на деталь (Рис.7.2)
Схема действующих на деталь сил
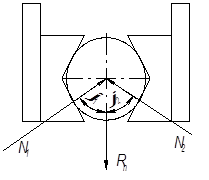
Рис.7.2
Рассчитаем силы воздействия губок на деталь по формуле:
![]() , (7.3)
, (7.3)
где φi – угол между проекцией на плоскость и силой Ni ,
kтр =0,14 – коэффициент трения между губками и заготовкой.
Данные занесем в таблицу 7.1.
Рассчитаем усилия привода.
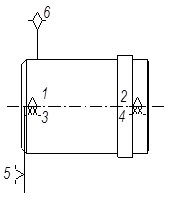
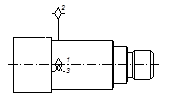
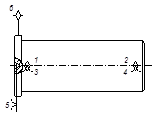
Определим моменты и силы привода захватного устройства (Рис.7.3).
Схема захватного устройства
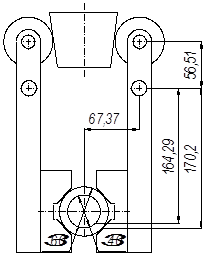
Рис.7.3
![]() , (7.4)
, (7.4)
где η=0,95 – КПД,
β=8º – угол клина,
ρ=1º10' – приведенный угол трения на подшипниках качения,
k – количество губок захватного устройства,
Мk – момент сил на губке,
![]() , (7.5)
, (7.5)
где a i =, ci =, – конструктивные параметры захватного устройства.
Для исключения потери жесткости крепления детали в захватном устройстве от влияния динамических нагрузок усилие на приводе увеличим, умножая на коэффициент Кд =4. Данные занесем в таблицу 7.1.
Определим конструктивные параметры привода и захватного устройства в целом. В зависимости от сил зажима детали губками и силы привода, полученных в результате расчетов, назначаем конструктивные параметры захватного устройства с приводом. Определим диаметр поршня и диаметр штока. Данные занесем в таблицу 7.1.
Крепление захватного устройства к руке робота будет происходить посредством резьбового соединения М24.
Таблица 7.1
Параметры захватного устройства
| Вставка | Палец | Ось сателлита | |
| Точка центра тяжести | 38,25 | 58 | 66,5 |
| Вес заготовки | 1,3 | 1,06 | 2,0 |
| Реакции в губках | 6,5 | 5,8 | 10 |
| Сила воздействия губок | 5,2 | 4,6 | 8,0 |
| Момент сил на губке | 825 | 708 | 1269 |
| Сила привода | 60 | 72 | 92 |
| Диаметр поршня | 40 | 40 | 40 |
| Диаметр штока | 20 | 20 | 20 |
8. Компоновка средств автоматизации загрузки и транспортной системы совместно с используемым токарным оборудованием
На основе полученных результатов проделанной работы, используя [6], [7], подготавливаем общий вид робототехнического комплекса.
На чертеже общего вида покажем вид в плане РТК, а также дополнительно виды и сечения для пояснения чертежа (см. приложение). Также на чертеже общего вида показываем циклограмму последовательности выполнения перемещений захватного устройства в процессе загрузки, разгрузки и транспортирования заготовок.
Транспортер-накопитель размещаем перед станком слева так, чтоб ось заготовки, находившейся на транспортере-накопителе и ожидавшей обработки, была параллельна оси обрабатываемой заготовки. Промышленный робот размещаем перпендикулярно оси обрабатываемой заготовки. Это дает нам следующие преимущества. Благодаря такой компоновке, занимаемая площадь оборудованием уменьшается (компактное расположение), а также увеличивается количество технологического оборудования, которое может обслужить промышленный робот, если оно будет компоноваться аналогично. Вследствие параллельности осей обрабатываемой и ожидающей обработки заготовок, исключаются лишние движения, которые необходимо совершить роботу, чтоб придать вновь обрабатываемой заготовки требуемое положение в пространстве. А это упрощает программу робота и ее изготовление. Также при такой компоновке обеспечиваются условия соблюдения техники безопасности, удобства обслуживания и эксплуатации оборудования, т.е. доступность оператора и наладчика узлов станка и средств автоматизации загрузки в период наладки и обслуживания оборудования. Данное компоновочное исполнение средств автоматизации загрузки в РТК удовлетворяет требованиям выполнения операций, каждой установки и каждого технологического перехода в отдельности в соответствии с технологическим процессом обработки детали.
9. Разработка циклограмм работы оборудования, входящего в РТК
Разработаем циклограмму работы оборудования, входящего в РТК, принимая последовательность выполнения основных и вспомогательных операций в цикле обработки деталей (см. таблицу 9.1). Для определения времени протекания этапа цикла будем использовать следующую формулу:
t=S/V, (9.1)
где S – путь, который проходит определенный элемент,
V – скорость прохождения данного пути.
Перед началом обработки деталей в автоматическом цикле на станке токарь вручную устанавливает заготовку в патрон и включает его систему ЧПУ, обработанную деталь забирает захватом II, вторую заготовку в захват I токарь устанавливает вручную.
Таблица 9.1.
Циклограмма работы оборудования
| Вид движения | Время, с |
| Транспортирование заготовки в захвате II в зону обработки | 1,62 |
| Опускание захвата I робота | 2,33 |
| Зажатие обработанной заготовки губками захвата I и ее раскрепление | 3,07 |
| Поднятие захвата I робота | 2,33 |
| Поворот захвата I робота с обработанной заготовкой на 180º | 2,0 |
| Опускание захвата I робота | 2,33 |
| Установка и закрепление заготовки на станке | 3,67 |
| Разжатие губок захватного устройства I | 1,15 |
| Обработка детали | t |
| Опускание захвата I робота | 2,33 |
| Зажатие обработанной заготовки губками захвата I и ее раскрепление | 3,07 |
| Поднятие захвата I робота | 2,33 |
| Горизонтальное перемещение руки для совмещения оси необработанной заготовки в захвате II с осью патрона | 2,0 |
| Опускание захвата II робота | 2,33 |
| Установка и закрепление заготовки на станке | 3,67 |
| Поднятие захвата II робота | 2,33 |
| Обработка детали | t |
| Опускание захвата II робота | 2,33 |
| Зажатие обработанной заготовки губками захвата II и ее раскрепление | 3,07 |
| Поднятие захвата II робота | 2,33 |
| Поворот захвата II робота с обработанной заготовкой на 180º | 2,0 |
| Опускание захвата II робота | 2,33 |
| Установка и закрепление заготовки на станке | 3,67 |
| Разжатие губок захватного устройства II | 1,15 |
| Обработка детали. Одновременно с этим происходит перемещение робота к транспортеру-накопителю, установка обработанной заготовки на транспортер-накопитель, перемещение тактового стола на шаг и захват роботом очередной заготовки. | t |
| Общее время цикла | 53,44+2tшт |
При последующем движении робота по порталу от стола к станку после его остановки и автоматический цикл в описанной последовательности повторяется
Данная циклограмма соответствует токарной обработке любой детали, участвующей в курсовом проектировании.
Заключение
Мы в нашем курсовом проектировании разработали технологический маршрут обработки деталей вставка, палец и ось сателлита. Подобрали станок и оснастку для осуществления токарных операций данного маршрута, а также осуществили выбор и расчет средств автоматизации данных операций: выбрали промышленный робот, тактовый транспортер-накопитель, рассчитали захват и разработали циклограмму работы оборудования, входящего в состав РТК, для обеспечения его автоматической работы. Цели, поставленные в начале курсового проектирования, считаем достигнутыми.
Литература
1. Косилова А.Г. и др. Справочник технолога-машиностроителя, том 1. – М. Машиностроение, 1985 – 656 с.
2. Михайлов А.В. План изготовления детали: Методические указания к выполнению курсовых и дипломных проектов. – Тольятти: ТолПИ, 1994. – 22с.
3. Автоматизированные комплексы механической обработки валов с использованием промышленных роботов./Методические рекомендации НПО ЭНИМС. – М.: НИИНМАШ, 1983. 64 с.
4. Михайлов А.В. Базирование и технологические базы: Методические указания к выполнению курсовых и дипломных проектов. – Тольятти: ТолПИ, 1994. – 30с.
5. Локтев С.Е. Станки с программным управлением и промышленные роботы. – М.: Машиностроение, 1986. 320 с.
6. Средства автоматизации загрузки и разгрузки деталей робототехнического комплекса для токарной обработки: Метод. указания/ Сост. Царев А.М. – Тольятти: ТолПИ, 1991.
7. Проектирование и разработка промышленных роботов/ С.С. Аншин, А.В. Бабич, А.Г. Баранов и др.; Под общ. ред. Я.А. Шифрина, П.Н. Белянина. – М.: Машиностроение, 1989. – 272с.: ил.
Похожие работы
-
Расчет и проектирования автоматической системы технологического оборудования
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ ДОНЕЦКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ КУРСОВАЯ РАБОТА по дисциплине: “Теория проектирования автоматизированных станочных комплексов”
-
Технология изготовления втулки 3
Разработка технологического процесса изготовления 1. Анализ конструкции детали и назначение детали Втулка изготавливается из сортового проката круг. Материал детали А12В. Вид проката, из которого изготавливается деталь, — круг горячекатный повышенной и нормальной точности с постоянной характеристикой поперечного сечения; диаметр — 34 мм.
-
Проектирование и разработка приспособления для изготовления отверстий в детали
Технологическая оснастка как важнейший фактор осуществления технического процесса в машиностроении. Основные этапы проектирования приспособления для изготовления отверстий в детали типа "рычаг". Служебное назначение приспособления, основные расчеты.
-
Технико-экономическая эффективность внедрения гибких производственных систем (ГПС)
Порядок расчета технико-экономической эффективности для каждой организационной структуры ГПС, техническая и социально-экономическая эффективность их внедрения в производство. Сравнение и оценка экономической эффективности различных форм автоматизации.
-
Разработка робототехнического комплекса токарной обработки
Технологический процесс обработки деталей. Расчет и проектирование транспортера-накопителя и разработка наладок размещения на нем заготовок. Компоновка средств автоматизации загрузки и транспортной системы совместно с используемым токарным оборудованием.
-
Программирование роботов робототехнических комплексов (РТК) механообработки
Разработка алгоритма функционирования управляющей программы для промышленных роботов, его особенности и порядок реализации. Состав типового многостаночного РТК. Примеры РТК механообработки и других сфер машиностроения, их функциональная нагрузка.
-
Разработка технологической операции выполняемой на токарном станке
Калужский Государственный машиностроительный колледж Отчет по лабораторному практикуму «Разработка технологической операции выполняемой на токарном станке»
-
Проектирование технологической оснастки
Анализ и выбор схемы базирования. Выбор и разработка установочных элементов. Разработка силовой схемы и расчет силы закрепления. Расчет силовых механизмов и привода приспособления. Конструирование приспособления и контрольного инструмента.
-
Разработка технологического процесса изготовления зубчатого колеса
Анализ исходных данных, выбор типа производства, форм организации технологического процесса изготовления колеса зубчатого. Метод получения заготовки и ее проектирование, технологический маршрут изготовления. Средства оснащения, технологические операции.
-
Обработка на станках с ЧПУ
Методика построения циклограмм функционирования роботизированного технологического комплекса. Операции технологического процесса обработки цапфы на станках. Точение ступеней на токарном станке с ЧПУ TRENS. Электрический контроль клапанов соленоидов.