Название: Розрахунок і вибір елементів електропривода механізму підйому
Вид работы: контрольная работа
Рубрика: Промышленность и производство
Размер файла: 162.97 Kb
Скачать файл: referat.me-302414.docx
Краткое описание работы: 1. Визначення типу привідного електродвигуна та основних параметрів кінематичної схеми Основною напругою для живлення кранових механізмів необхідно прийняти трифазну напругу Uл = 380 В частотою f = 50 Гц. У якості привідного двигуна механізму підйому доцільно прийняти асинхронний трифазний електродвигун із фазним ротором типу МТН.
Розрахунок і вибір елементів електропривода механізму підйому
Розрахунок і вибір елементів електропривода механізму підйому
1. Визначення типу привідного електродвигуна та основних параметрів кінематичної схеми
Основною напругою для живлення кранових механізмів необхідно прийняти трифазну напругу Uл = 380 В частотою f = 50 Гц. У якості привідного двигуна механізму підйому доцільно прийняти асинхронний трифазний електродвигун із фазним ротором типу МТН. Ураховуючи те, що електродвигун, як правило, має кутову швидкість більшу, ніж швидкість обертання барабана лебідки, в кінематичній схемі механізму підйому необхідно передбачити застосування стандартного знижувального редуктора.
Для розрахунку слід прийняти однокінцеву підйомну лебідку (неврівноважений підйомний механізм). Потрібно орієнтуватись на кінематичну схему механізму підйому (рис.1).
|
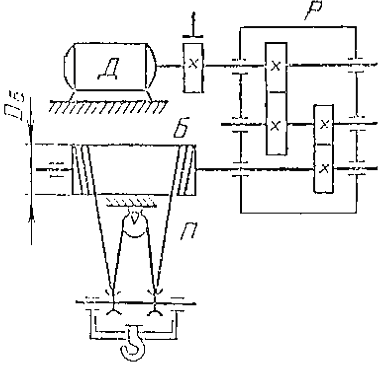
Рис.1. Кінематична схема механізму підйому мостового крана
Для таких механізмів залежно від максимальної висоти підйому Н розрахункова швидкість підйому вантажу визначається як
![]() , м/с. (1)
, м/с. (1)
Кранові асинхронні двигуни з фазним ротором мають стандартні значення частоти обертання електромагнітного поля:
nо = 600 хв-1 ; wо = 62,8 c-1 ;
nо = 750 хв-1 ; wо = 78,5 c-1 ;
nо = 1000 хв-1 ; wо = 104,7 c-1 .
Величина n0 залежить від параметрів таким чином :
 , ( 2 )
, ( 2 )
де i – передавальне число редуктора (i= 9; 10; 11; 12; 12,5; 14; 16; 18; 20; 22,4; 25; 28; 31,5; 35,5; 40; 45; 50; 56; 63; 71; 80; 90; 100; 112; 125; 140);
m – кратність поліспаста (практично m = 1, 2, 3, 4, 5, 6, 7, 8);
Rб – радіус барабана лебідки, м .
На попередньому етапі розрахунку необхідно визначити добуток
![]() . ( 3 )
. ( 3 )
Значення nо слід вибрати з трьох наведених вище, починаючи з більшого (менша кількість пар полюсів приводить до зниження вартості двигуна).
Використовуючи стандартний ряд значень передавальних чисел редуктора, необхідно визначити кратність поліспаста m і передавальне число i , після чого потрібно уточнити фактичну швидкість підйому за формулою
![]() , м/с. ( 4 )
, м/с. ( 4 )
Подальші розрахунки необхідно виконувати на базі фактичної швидкості ![]()
2. Визначення статичних навантажень, побудова статичної навантажувальної діаграми та встановлення режиму роботи електропривода
При побудові статичної навантажувальної діаграми слід визначити статичні навантаження на валу двигуна і барабані при підйомі та опусканні вантажу гака.
Сила опору при підйомі вантажу
F = (Gвант +Gо ) , Н. ( 5 )
Статичний момент опору на валу барабана
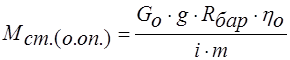
 . ( 6 )
. ( 6 )
Статичний момент опору на валу двигуна при підйомі вантажу
 . ( 7 )
. ( 7 )
Статичний момент опору на валу двигуна при опусканні вантажу
 , Н.
м. ( 8 )
, Н.
м. ( 8 )
Статичний момент опору на валу двигуна при підйомі гака
 , Н.
м. ( 9 )
, Н.
м. ( 9 )
Статичний момент опору на валу двигуна при опусканні гака
 , Н.
м, ( 10 )
, Н.
м, ( 10 )
де Rбар – радіус барабана лебідки, м ;
m – кратність поліспаста;
і – передавальне число редуктора;
![]() – ККД механізму підйому при повному навантаженні;
– ККД механізму підйому при повному навантаженні;
![]() – ККД механізму без навантаження;
– ККД механізму без навантаження;
g = 9,8 – прискорення вільного падіння, м/с2 .
Для механізму підйому необхідно взяти до уваги чотири робочі операції: підйом вантажу, опускання вантажу, підйом гака, опускання гака.
Розрахункову тривалість робочих операцій потрібно визначати таким чином:
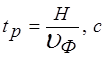 , ( 11 )
, ( 11 )
де Н – висота підйому вантажу, м ;
![]() – фактична швидкість підйому вантажу, м/с .
– фактична швидкість підйому вантажу, м/с .
У процесі розрахунку необхідно прийняти
![]() , ( 12 )
, ( 12 )
де ![]() – розрахункова тривалість робочих операцій підйому та опускання вантажу, підйому й опускання гака відповідно.
– розрахункова тривалість робочих операцій підйому та опускання вантажу, підйому й опускання гака відповідно.
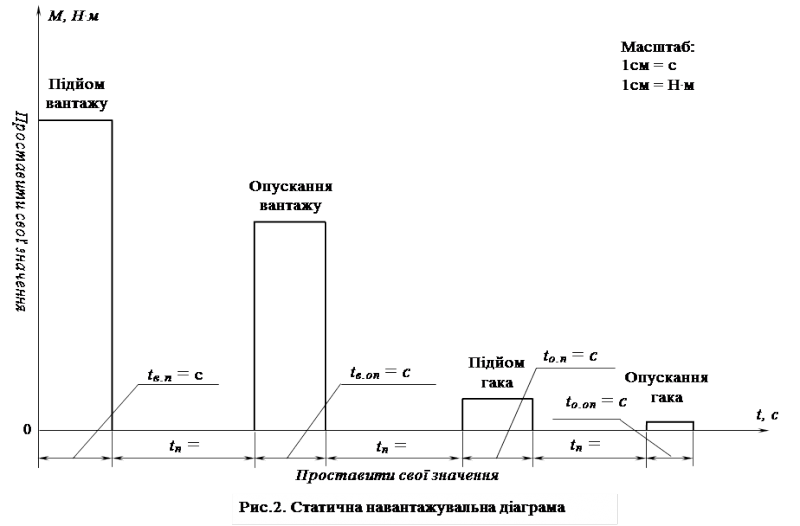
На першому етапі розрахунку слід побудувати в масштабі статичну (без урахування динамічних навантажень) навантажувальну діаграму механізму підйому, беручи до уваги розрахункову тривалість робочих операцій (рис. 2).
Потім необхідно уточнити навантажувальну діаграму (врахувати динамічні навантаження).
У процесі розрахунку потрібно визначити режим роботи електропривода.
Особливість роботи механізму підйому – часті пуски електродвигуна при відносно невеликій тривалості робочих операцій. Це відповідає повторно-короткочасному режиму роботи електрообладнання.
За даними статичної навантажувальної діаграми необхідно визначити розрахункове значення тривалості ввімкнення (ТВ)
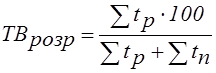 , %, ( 13 )
, %, ( 13 )
де S tP і S tп – тривалість відповідно робочих операцій та пауз між ними, с ;
сума S tP + S tп – тривалість циклу.
Величину ТВ далі слід уточнити і при виборі двигуна за каталожними даними (або з додатків) прийняти з ряду стандартних значень: ТВкат = 25; 40; 60; 100 %.
3. Розрахунок необхідної потужності привідного електродвигуна
Для попереднього розрахунку необхідної потужності електродвигуна потрібно визначити статичний момент механізму підйому
 ( 14 )
( 14 )
Розрахункову потужність двигуна слід визначати з рівності
![]() , кВт.
, кВт.
Потужність двигуна необхідно привести до стандартного (каталожного) значення
 , кВт, ( 15 )
, кВт, ( 15 )
де R кат , T B кат – каталожні значення потужності і тривалості ввімкнення;
R розр , T B розр – розрахункові значення цих величин.
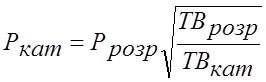
Згідно з додатком 4 потрібно вибрати найближчий більший за потужністю двигун. При цьому треба виконати умову ![]() .
.
 |
Якщо потужність вибраного електродвигуна більша (160 кВт (при ТВ
= = 40%) або 125 кВт (при ТВ
= 60%)), то необхідно розрахунок виконати знову, збільшивши добуток ![]() .
.
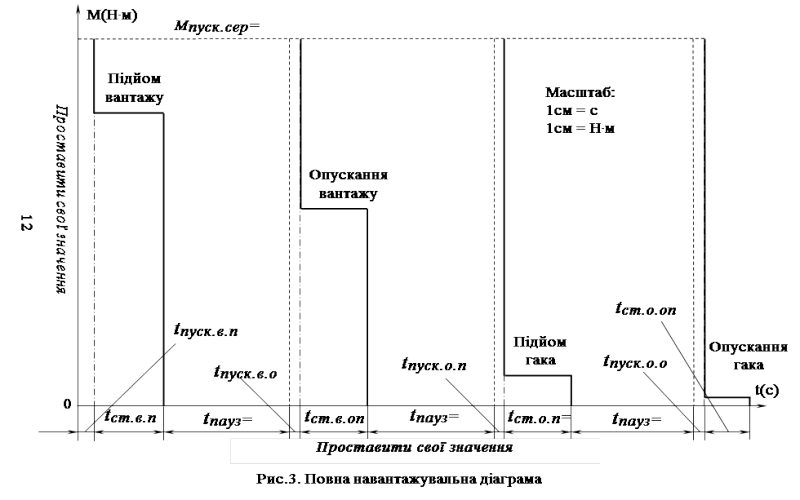
4. Побудова повної навантажувальної діаграми
Для побудови повної навантажувальної діаграми необхідно розрахувати приведений до вала двигуна момент інерції механізму, який з урахуванням моменту інерції ротора потрібно встановити з умови
 , кг.
м2
, ( 16 )
, кг.
м2
, ( 16 )
де Jдв – момент інерції ротора, кг. м2 ;
0,15Jдв – момент інерції (приведений) передавального механізму, кг. м2 ;
m = Gвант + G0 – маса поступально-рушійних частин механізму з ураху-
ванням маси вантажу, кг ;
![]() – фактична швидкість підйому (опускання), м/с ;
– фактична швидкість підйому (опускання), м/с ;
 – номінальна швидкість двигуна, с-1
.
– номінальна швидкість двигуна, с-1
.
Приведений момент інерції необхідно визначити для номінального навантаження привода, тому що в інших режимах він несуттєво відрізняється від номінального.
Доцільно обчислити середній пусковий момент за формулою
![]() ,
,
де ![]()
![]() .
.
Час (тривалість) пуску електродвигуна на робочих операціях необхідно визначити за формулами :
 ( 17 )
( 17 )
 (18)
(18)
 ( 19 )
( 19 )
 ( 20 )
( 20 )
Динамічні моменти під час пуску електродвигуна слід обчислити за формулами:
 ( 21 )
( 21 )
 ( 22 )
( 22 )
 ( 23 )
( 23 )
 ( 24 )
( 24 )
Час (тривалість) роботи механізму при виконанні робочих операцій у статичному режимі необхідно визначити за формулами:
![]() ( 25 )
( 25 )
![]() ( 26 )
( 26 )
![]() ( 27 )
( 27 )
![]() ( 28 )
( 28 )
Базуючись на розрахункових значеннях ![]() ,
, ![]() ,
, ![]() ,
, ![]() , з урахуванням
, з урахуванням ![]() потрібно побудувати в масштабі повну навантажувальну діаграму (рис. 3).
потрібно побудувати в масштабі повну навантажувальну діаграму (рис. 3).
При побудові повної навантажувальної діаграми має виконуватись умова
![]() . ( 29 )
. ( 29 )
Для операції підйому вантажу необхідно визначити суму
![]() ( 30 )
( 30 )
та розрахувати похибку
 . ( 31 )
. ( 31 )
Розрахункова похибка не повинна перевищувати 10% . Якщо похибка буде більшою від 10%, то треба попередній розрахунок виконати ще раз, вибравши більший за потужністю електродвигун при тому ж значенні ТВ.
5. Перевірка температурного режиму (нагрівання) та перевантажувальної здатності вибраного електродвигуна
Перевірку вибраного двигуна механізму підйому на нагрівання потрібно здійснювати з урахуванням повної навантажувальної діаграми. При цьому еквівалентний момент навантаження становить
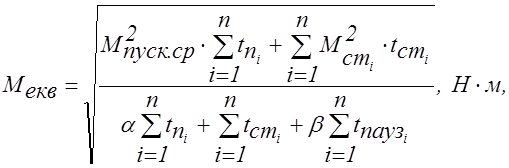 ( 32 )
( 32 )
де a = 0,75; b = 0,5 – коефіцієнти, що враховують умови охолодження в
режимах “пуск” та “стоп”;
tпi – час пуску на кожній операції, с ;
Mст.і – статичний момент на кожній операції, Н. м ;
tст.i – час роботи при виконанні кожної операції у статичному режимі, с;
tпауз.i – тривалість пауз, с.
Умовою перевірки перевантажувальної здатності електродвигуна є
![]() (при раніше прийнятому ТВ) ,
(при раніше прийнятому ТВ) ,
де 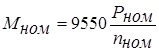 , Н.
м.
, Н.
м.
Слід зробити висновок про виконання умови ![]() . При її невиконанні необхідно вибрати наступний за потужністю двигун і розрахунок повторити.
. При її невиконанні необхідно вибрати наступний за потужністю двигун і розрахунок повторити.
6. Розрахунок та побудова природної механічної характеристики
Для побудови природної механічної характеристики потрібно визначити номінальне ковзання
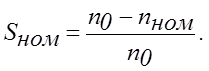 ( 33 )
( 33 )
Далі необхідно розрахувати критичне ковзання
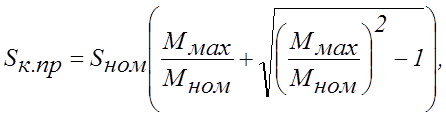 ( 34 )
( 34 )
де ![]() – значення максимального моменту (див. табл. 3).
– значення максимального моменту (див. табл. 3).
У процесі проектування слід побудувати природну механічну характеристику, використовуючи рівняння механічної характеристики (спрощену формулу Клоса),
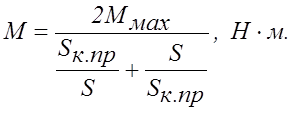 ( 35 )
( 35 )
Значення n необхідно розрахувати за формулою
![]() ( 36 )
( 36 )
7. Розрахунок і вибір пускових резисторів
Пускові резистори при пуску АД із фазним ротором служать для обмеження величини пускового струму двигуна та збільшення значення пускового моменту і тим самим поліпшення умов проходження процесу пуску.
Пускові резистори вмикаються у кожну фазу ротора АД (рис. 3). Зазвичай повний опір пускових резисторів Rп розбивається на секції, кількість яких відповідає кількості штучних механічних характеристик.
|
|
|
|
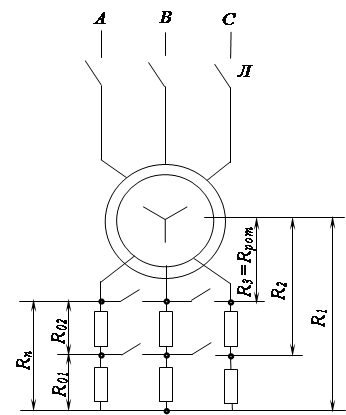
Рис. 3. Принципова схема АД із фазним ротором
На цій схемі пускові резистори в кожній фазі складаються з двох секцій Rп =R01 +R02 . Кожному значенню опору кола ротора (R1 =Rрот +R01 +R02 , R2 =Rрот +R02 , R3 =Rрот ) відповідає своя механічна характеристика, за котрою двигун прискорюється.
При пуску двигуна першими замикаються контакти Л
у колі статора (при розімкнених контактах прискорення 1п
, 2п
). При цьому статор під’єднується до мережі живлення з повним опором Rn
у колі ротора. Це обмежує пусковий струм та збільшує початковий пусковий момент. Ротор під дією початкового пускового моменту ![]() починає прискорюватись за штучною характеристикою R1
.
починає прискорюватись за штучною характеристикою R1
.
Зі збільшенням обертів двигуна опір кола ротора необхідно зменшувати. При досягненні швидкості n1
та зменшенні моменту на валу контактами прискорення 1п
вимикається (шунтується) перша секція (резистори R01
), а при швидкості n2
контактами 2п
вимикається друга секція (резистори R02
). Пуск закінчується на природній механічній характеристиці ![]() . Секції вимикаються найчастіше автоматично.
. Секції вимикаються найчастіше автоматично.
Величини пускових резисторів і їх кількість можна розрахувати аналітичним або графічним методами.
Похожие работы
-
Розрахунок двигуна механізму вильоту стріли
1. Визначення і розрахунок компонентів приводу механізму зміни вильоту стріли 1.1 Визначення зусиль у механізмі зміни вильоту стріли Визначимо довжину стріли [2]
-
Електропривід ручних електричних машин
Поняття, призначення та класи ручних електричних машин (РЕМ). Електропривід РЕМ та вимоги до нього. Різновиди електродвигунів і джерел живлення РЕМ. Особливості застосування РЕМ у різних галузях господарства. Правила безпеки при експлуатації РЕМ.
-
Розрахунок параметрів регуляторів систем регулювання координатами реверсивного електропривода
Значення функціональних частин, які має у своєму складі реверсивний електропривод. Регулювання координат реверсивного електроприводу для мінімальної швидкості і навантаження. Побудова схеми регулятора швидкості та струму. Переваги автоматизованих ЕП.
-
Розробка електропривода вентиляційної установки
Призначення та будова вентилятора, вимоги до його електроприводу. Визначення потужності і вибір електродвигуна, побудова механічної характеристики, розрахунок характеристик статичного моменту опору. Принципова схема установки, заходи по енергозбереженню.
-
Експлуатація електроприводу крана
Зміни в розвитку автоматизованих систем керування електропривода. Експлуатація кранового устаткування і вибір системи електропривода механізму підйому. Контактні комутаційні елементи. Розрахунок теплового режиму двигуна і потужності механізму переміщення.
-
Розрахунок побудови профілю глибинного насосу
Методи розрахунку побудови профілю кулачка, призначеного для керування клапанами. Особливості застосування закону руху штовхача. Характер руху ланок механізму і кінематичних пар. Аналіз руху машинного агрегату й розрахунок маховика. Рівняння руху машини.
-
Визначення параметрів електропривода верстата з ЧПК з підпорядкованим регулюванням координат
Автоматизація процесів управління електричними машинами. Визначення параметрів електропривода верстата з ЧПК: розрахунок потужності і вибір двигунів при контурно-позиційному керуванні. Інформаційні електромеханічні елементи виконавчих систем верстата.
-
Синтез системи керування електроприводом технологічної установки
Структурний синтез як перехід від формалізованого алгоритму керування. Розробка технологічної установки схеми керування. Схема керування асинхронним двигуном з коротко замкнутим ротором і двома статорними обмотками. Механічні характеристики двигуна.
-
Визначення параметрів пристроїв для очищення газу від пилу
Методи розрахунку циклона з дотичним підводом газу. Визначення діаметру вихлопної труби, шляху та часу руху частки пилу. Розрахунок середньої колової швидкості газу в циклоні. Висота циліндричної частини циклона. Розрахунок пилоосаджувальної камери.
-
Вибір двигуна постійного та змінного струму для роботи в системі електроприводу
Курсова робота На тему: "Вибір двигуна постійного та змінного струму, для роботи в системі електроприводу" Дніпропетровськ 2010 ЗМІСТ ВХІДНІ ДАНІ