Название: Электрическая схема потенциометрического датчика
Вид работы: реферат
Рубрика: Физика
Размер файла: 114.07 Kb
Скачать файл: referat.me-340435.docx
Краткое описание работы: Потенциометрический датчик представляет собой переменный резистор, к которому приложено питающее напряжение, его входной величиной является линейное или угловое перемещение токосъемного контакта, а выходной величиной – напряжение, снимаемое с этого контакта, изменяющееся по величине при изменении его положения.
Электрическая схема потенциометрического датчика
Потенциометрический датчик представляет собой переменный резистор, к которому приложено питающее напряжение, его входной величиной является линейное или угловое перемещение токосъемного контакта, а выходной величиной – напряжение, снимаемое с этого контакта, изменяющееся по величине при изменении его положения.
Потенциометрические датчики предназначены для преобразования линейных или угловых перемещений в электрический сигнал, а также для воспроизведения простейших функциональных зависимостей в автоматических и автоматических устройствах непрерывного типа.
Электрическая схема потенциометрического датчика
По способу выполнения сопротивления потенциометрические датчики делятся на
- ламельные с постоянными сопротивлениями;
- проволочные с непрерывной намоткой;
- с резистивным слоем.
Ламельные потенциометрические датчики использовались для проведения относительно грубых измерений в силу определенных конструктивных недостатков.
В таких датчиках постоянные резисторы, подобранные по номиналу специальным образом, припаиваются к ламелям.
Ламель представляет собой конструкцию с чередующимися проводящими и непроводящими элементами, по которой скользит токосъемный контакт. При движении токосъемника от одного проводящего элемента к другому суммарное сопротивление подключенных к нему резисторов меняется на величину соответствующую номиналу одного сопротивления. Изменение сопротивлений может происходить в широких пределах. Погрешность измерений определяется размерами контактных площадок.
Ламельный потенциометрический датчик
Проволочные потенциометрические датчики предназначены для более точных измерений. Как правило их конструкции представляют собой каркас из гетинакса, текстолита или керамики, на который в один слой, виток к витку намотана тонкая проволока, по зачищенной поверхности которой скользит токосъемник.
Диаметр проволоки определяет класс точности потенциометрического датчика (высокий-0,03-0,1 мм , низкий 0,1-0,4 мм). Материалы провода: манганин, фехраль, сплавы на основе благородных металлов. Токосъемник выполнен из более мягкого материала, чтобы исключить перетирание провода.
Преимущества потенциометрических датчиков:
- простота конструкции;
- малые габариты и вес;
- высокая степень линейности статических характеристик;
- стабильность характеристик;
- возможность работы на переменном и постоянном токе.
Недостатки потенциометрических датчиков:
- наличие скользящего контакта, который может стать причиной отказов из-за окисления контактной дорожки, перетирания витков или отгибание ползунка;
- погрешность в работе за счет нагрузки;
- сравнительно небольшой коэффициент преобразования;
- высокий порог чувствительности;
- наличие шумов;
- подверженность электроэррозии под действием импульсных разрядов.
Статическая характеристика потенциометрических датчиков
Статическая характеристика нереверсивного потенциометрического датчика
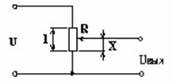
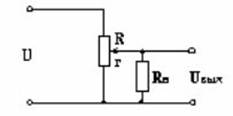
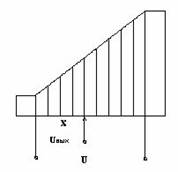
Рассмотрим на примере потенциометрического датчика с непрерывной намоткой. К зажимам потенциометра прикладывается переменное или постоянное напряжение U. Входной величиной является перемещение X, выходной − напряжение Uвых. Для режима холостого хода статическая характеристика датчика линейна т.к. справедливо соотношение : Uвых=(U/R)r,
где R- сопротивление обмотки; r- сопротивление части обмотки.
Учитывая, что r/R=x/l, где l - общая длина намотки, получим Uвых=(U/l)x=Kx [В/м],
где К - коэффициент преобразования (передачи) датчика.
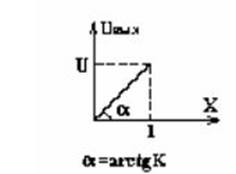
Очевидно, что такой датчик не будет реагировать на изменение знака входного сигнала (датчик нереверсивный). Существуют схемы чувствительные к изменению знаку. Статическая характеристика такого датчика имеет вид представленный на рисунке.
Реверсивная схема потенциометрического датчика
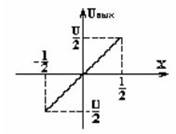
Статическая характеристика реверсивного потенциометрического датчика
Полученные идеальные характеристики могут существенно отличатся от реальных за счет наличия различного рода погрешностей:
1.Зона нечувствительности.
Выходное напряжение меняется дискретно от витка к витку, т.е. возникает эта зона, когда при малом входная величина Uвых не меняется.
Величина скачка напряжения определяется по формуле: DU=U/W, где W- число витков.
Порог чувствительности определяется диаметром намоточного провода: Dx=l/W.
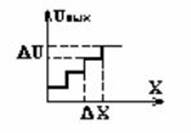
Зона нечувствительности потенциометрического датчика
2.Неравномерность статической характеристики из-за непостоянства диаметра провода, удельного сопротивления и шага намотки.
3.Погрешность от люфта, возникающего между осью вращения движка и направляющей втулкой (для уменьшения используют поджимные пружины).
4. Погрешность от трения.
При малых мощностях элемента приводящего в движение щетку потенциометрического датчика может возникать за счет трения зона застоя.
Необходимо тщательно регулировать нажим щетки.
5.Погрешность от влияния нагрузки.
В зависимости от характера нагрузки возникает погрешность, как в статическом, так и в динамическом режимах. При активной нагрузке изменяется статическая характеристика. Величина выходного напряжения будет определяться в соответствии с выражением: Uвых=(UrRн)/(RRн+Rr-r2)
Т.е. Uвых=f(r) зависит от Rн. При Rн>>R можно показать, что Uвых=(U/R)r;
при Rн приблизительно равном R зависимость нелинейна, и максимальная погрешность датчика будет при отклонении движка на (2/3))l. Обычно выбирают Rн/R=10…100. Величина ошибки при x=(2/3)l может быть определена из выражения : E=4/27η, где η=Rн/R - коэффициент нагрузки.
Потенциометрический датчик под нагрузкой
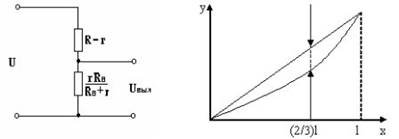
a - Эквивалентная схема потенциометрического датчика с нагрузкой, б - Влияние нагрузки на статическую характеристику потенциометрического датчика.
Динамические характеристики потенциометрических датчиков
Передаточная функция
Для вывода передаточной функции удобнее за выходную величину взять ток нагрузки, его можно определить пользуясь теоремой об эквивалентном генераторе. Iн=Uвых0/(Rвн+Zн)
Рассмотрим два случая:
1.Нагрузка чисто активная Zн=Rн т.к. Uвых0=K1x Iн=K1x/(Rвн+Rн)
где K1 − коэффициент передачи датчика на холостом ходу.
Применяя преобразование Лапласа, получим передаточную функцию W(p)=Iн(p)/X(p)=K1/(Rвн+Rн)=K
Таким образом, мы получили безынерционное звено, а значит датчик имеет все, соответствующие этому звену частотные и временные характеристики.
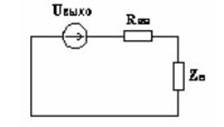
Схема замещения
2. Нагрузка индуктивная с наличием активной составляющей .
U=RвнIн+L(dIн/dt)+RнIн
Применяя преобразование Лапласа получим Uвыхx(p)=Iн(p)[(Rвн+pL)+Rн]
Путем преобразований можно прийти к передаточной функции вида W(p)=K/(Tp+1) – апериодическое звено 1-го порядка,
где K=K1/(Rвн+Rн)
T=L/(Rвн+Rн);
Собственные шумы потенциометрического датчика
Как было показано, при движении щетки от витка к витку напряжение на выходе меняется скачком. Погрешность, создаваемая ступенчатостью имеет вид пилообразного напряжения, наложенного на выходное напряжение передаточной функции ,т.е. представляет собой шум. При наличии вибрации щетки при движении также создается шум (помеха). Частотный спектр вибрационного шума лежит в области звуковых частот.
Для устранения вибрации токосъемники выполняют из нескольких проволочек различной длины сложенных вместе. Тогда собственная частота каждой проволочки будет различна, это препятствует появлению технического резонанса. Уровень тепловых шумов- низок, их учитывают в особо чувствительных системах.
Функциональные потенциометрические датчики
Необходимо отметить, что в автоматике часто для получения нелинейных зависимостей используются функциональные передаточной функции. Их построение производится тремя способами:
- изменением диаметра проволоки вдоль намотки;
- изменением шага намотки;
- применением каркаса определенной конфигурации;
- шунтированием участков линейных потенциометров сопротивлениями различной величины.
Например, чтобы получить квадратичную зависимость по 3-му способу, нужно чтобы ширина каркаса изменялась по линейному закону, как это показано на рисунке.
Функциональный потенциометрический датчик
Многооборотный потенциометр
Обычные потенциометрические датчики имеют ограниченный диапазон работы. Его величина задана геометрическими размерами каркаса и числом витков обмотки. Их увеличивать беспредельно нельзя. Поэтому нашли применение многооборотные потенциометрические датчики, у которых резистивный элемент свит по винтовой линии с несколькими витками, их ось должна повернуться несколько раз, чтобы движок переместился с одного конца обмотки на другой, т.е. электрический диапазон таких датчиков кратен 3600.
Основным достоинством многооборотных потенциометров является высокая разрешающая способность и точность, что достигается благодаря большой длине резистивного элемента при малых общих габаритах.
Фотопотенциометры
Фотопотенциометр − представляет собой бесконтактный аналог обычного потенциометра с резистивным слоем, механический контакт в нем заменен фотопроводящим, что, конечно, повышает надежность и срок службы. Сигналом с фотопотенциометра управляет световой зонд, выполняющий роль движка. Он формируется специальным оптическим устройством и может смещаться в результате внешнего механического воздействия вдоль фотопроводящего слоя. В месте засветки фотослоя возникает избыточная по сравнению с темновой фотопроводимость и создается электрический контакт.
Фотопотенциометры делятся по назначению на линейные и функциональные.
Функциональные фотопотенциометры позволяют пространственное перемещение источника света преобразовать в электрический сигнал заданного функционального вида за счет профилированного резистивного слоя (гиперболические, экспоненциальные, логарифмические).
Реверсивные потенциометрические датчики
Выходное напряжение реверсивных датчиков изменяет знак (полярность) при изменении знака входного сигнала. В системах автоматического регулирования обычно требуются именно реверсивные (или двухтактные) датчики.
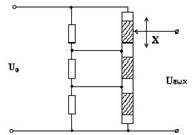
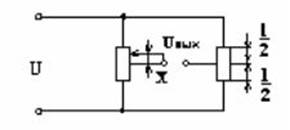
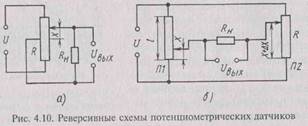
Схемы реверсивных потенциометрических датчиков показаны на рис. 4.10. В схеме на рис. 4.10, а используется потенциометр с неподвижным выводом от средней точки намотки. Выходное напряжение снимается с движка и средней точки. При переходе движка через среднюю точку выходное напряжение изменяет свой знак: при питании переменным током фаза изменяется на 180°, а постоянным током — полярность изменяется на противоположную. В следящих системах широко используется мостовая схема включения потенциометрических датчиков, показанная на рис. 4.10, б. Потенциометр П1 связан с входной осью следящей системы и является задающим. Потенциометр П2 имеет механическую связь с исполнительным устройством. Выходное напряжение (или ток нагрузки) определяется разницей в положении движков потенциометров П1 и П2, т. е. соответствует сигналу ошибки следящей системы. Знак сигнала ошибки зависит от того, больше или меньше угол поворота исполнительного вала по сравнению с углом поворота входного вала.
 Выходное напряжение рассматриваемых реверсивных схем может быть определено на основании теоремы об эквивалентном генераторе. Исследуемую систему представим как цепь, состоящую из четырехполюсника, источника питания с напряжением Uo
и сопротивления нагрузки RH
.
Тогда на основании известного из электротехники метода можно утверждать, что схема ведет себя, как цепь, составленная из нагрузки RH
и генератора с внутренним сопротивлением R
вых
и электродвижущей силой Е,
равной напряжению холостого хода Uх
. Сопротивление Rвых
равно выходному сопротивлению четырехполюсника, которое вычисляют при закороченном источнике питания и отключенной нагрузке. Напряжение Ux
измеряется на выходе рассматриваемой схемы при отключенном сопротивлении нагрузки Ян
.
Для четырехполюсников по схемам рис. 4.10 выходное напряжение
Выходное напряжение рассматриваемых реверсивных схем может быть определено на основании теоремы об эквивалентном генераторе. Исследуемую систему представим как цепь, состоящую из четырехполюсника, источника питания с напряжением Uo
и сопротивления нагрузки RH
.
Тогда на основании известного из электротехники метода можно утверждать, что схема ведет себя, как цепь, составленная из нагрузки RH
и генератора с внутренним сопротивлением R
вых
и электродвижущей силой Е,
равной напряжению холостого хода Uх
. Сопротивление Rвых
равно выходному сопротивлению четырехполюсника, которое вычисляют при закороченном источнике питания и отключенной нагрузке. Напряжение Ux
измеряется на выходе рассматриваемой схемы при отключенном сопротивлении нагрузки Ян
.
Для четырехполюсников по схемам рис. 4.10 выходное напряжение
U вых = Ux RH ( R вых+ RH )
Например, для схемы, изображенной на рис. 4.10, а, имеем
Ux = UH = U 0 α /2,
R вых = R α (1- α /2)/2.
Подставляя выражения (4.4) и (4.5) в формулу (4.3), получаем
U вых = U 0 α β >/( α-0,5 α 2 +2 β),
Где β= RH / R .
Аналогичные вычисления позволяют получить для схемы рис. 4.10, б при одинаковых потенциометрах П1 и П2 уравнение выходного напряжения
![]()
где ∆α = ∆х/ l — относительное рассогласование движков потенциометров П1 и П2; α = х/ l — относительное перемещение движка задающего потенциометра П1; β = RH / R — отношение сопротивления нагрузки RH к полному сопротивлению потенциометра R .
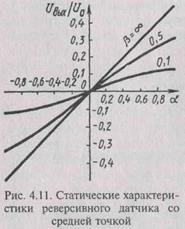
На рис 4.11 и 4.12 показаны выходные характеристики реверсивных потенциометрических датчиков, построенные соответственно по уравнениям (4.6) и (4.7). Характеристики построены при различных значениях коэффициента нагрузки р. Расчетные характеристики при холостом ходе (β = ∞) представляют собой прямые линии, т. е. являются линейными. С уменьшением сопротивления нагрузки увеличивается отклонение характеристики от линейной. Чувствительность датчика со средней точкой (рис. 4.10, а), как следует из уравнения (4.6) и рис. 4.11, в области малых отклонений, а практически не зависит от нагрузки и определяется равенством
![]()
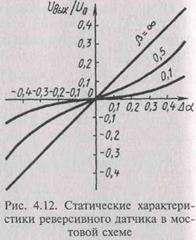
 Характеристики, изображенные на рис. 4.12, соответствуют мостовой схеме (см. рис. 4.10, б)
и построены на основании формулы (4.7) для случая, когда движок задающего потенциометра установлен посередине его намотки и, следовательно, α = 0,5, а относительное рассогласование движков ∆α может изменяться в пределах от -0,5 до +0,5. Чувствительность мостовой схемы зависит не только от нагрузки, но и от положения движка задающего потенциометра:
Характеристики, изображенные на рис. 4.12, соответствуют мостовой схеме (см. рис. 4.10, б)
и построены на основании формулы (4.7) для случая, когда движок задающего потенциометра установлен посередине его намотки и, следовательно, α = 0,5, а относительное рассогласование движков ∆α может изменяться в пределах от -0,5 до +0,5. Чувствительность мостовой схемы зависит не только от нагрузки, но и от положения движка задающего потенциометра:
![]()
Анализ этого уравнения показывает, что наименьшее значение чувствительности будет при α = 0,5. Этому случаю и соответствуют характеристики, показанные на рис. 4.12.
В маломощных следящих системах в качестве нагрузки мостовой схемы может быть включен якорь исполнительного электродвигателя. При рассогласовании в положениях движков задающего и исполнительного потенциометров через якорь электродвигателя пойдет ток, значение которого будет соответствовать величине рассогласования (∆α), а направление — знаку рассогласования. Электродвигатель перемещает исполнительную ось следящей системы до тех пор, пока не будет устранено рассогласование.
Похожие работы
-
Электрический преобразователь давления
Сущность, конструкции и принцип действий преобразователей сигналов, обозначение их параметров. Строение и назначение манометра САПФИР – 22ДИ, а также особенности поступления электрического сигнала к нему. Принцип действия различных видов преобразователей.
-
Использование потенциометрического эффекта для измерения физических величин
Понятие потенциометрического эффекта и его применение в технике. Эквивалентная схема потенциометрического устройства. Измерение физических величин на основе потенциометрического эффекта. Датчики, построенные на основании потенциометрического эффекта.
-
Устройство терморегулятора и его виды
Датчики температуры с терморезисторами (термометры сопротивления). Металлические и полупроводниковые терморезисторы, их чувствительные элементы. Номинальные функции преобразования (статические характеристики) медных и платиновых терморезисторов.
-
Усилительные каскады на основе операционных усилителей
Свойства операционных усилителей, охваченных отрицательной обратной связью по напряжению. Линейные и нелинейные схемы. Повторители и сумматоры на основе ОУ. Логарифмические, антилогарифмические и функциональные усилители. Простейшие фильтры на основе ОУ.
-
Исследование биполярного транзистора 2
Лабораторная работа 1 Тема: " Исследование биполярного транзистора" Цель: Получение входных и выходных характеристик транзистора. Приборы и элементы: Биполярный транзистор 2N3904, источник постоянной ЭДС, источник переменной ЭДС, амперметры, вольтметры, осциллограф, резисторы.
-
Разработка электронного реле
Электромагнитные, электронные реле и их эксплуатационные показатели. Проектирование полупроводникового реле тока. Коммутация токов и напряжений. Структурная и электрическая схемы реле. Применение интегральных микросхем. Расчет номинальных параметров.
-
Неразветвлённая электрическая цепь с одним переменным сопротивлением
Исследование изменения токов, напряжений, мощности, КПД в неразветвлённой цепи при изменении одного из двух сопротивлений. Ознакомление с режимами работы электрической цепи: холостым ходом и коротким замыканием. Порядок сборки схемы и ее изучение.
-
Чувствительные элементы или датчики
Чувствительность датчиков, их классификация по тем величинам, которые они должны измерять (датчики давления, датчики уровня). Основные типы датчиков сопротивления и их характеристики. Устройство емкостных и струнных датчиков, свойства фотоэлементов.
-
Исследование биполярного транзистора
Получение входных и выходных характеристик транзистора. Включение биполярного транзистора по схеме с общим эмиттером. Проведение измерения тока базы, напряжения база-эмиттер и тока эмиттера для значений напряжения источника. Расчет коллекторного тока.
-
Резисторы: назначение, классификация и параметры
Характеристика сущности резисторов, которые предназначены для перераспределения и регулирования электрической энергии между элементами схемы. Классификация, конструкции и параметры резисторов, характеризующие их эксплуатационные возможности применения.