Название: Розробка програми передачі даних через послідовний порт мікроконтролера
Вид работы: курсовая работа
Рубрика: Информатика и программирование
Размер файла: 27.94 Kb
Скачать файл: referat.me-136192.docx
Краткое описание работы: Розрахунок часових затримок для формування імпульсів у програмі передачі даних через послідовний порт мікроконтролера, а також розрахунок швидкості передачі даних через послідовний порт. Алгоритм підпрограми обробки переривань від послідовного порту.
Розробка програми передачі даних через послідовний порт мікроконтролера
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
ЛЬВІВСЬКИЙ ДЕРЖАВНИЙ ІНСТИТУТ НОВІТНІХ ТЕХНОЛОГІЙ ТА УПРАВЛІННЯ ІМ. В.ЧОРНОВОЛА
Факультет інформаційних технологій
Кафедра КСМ
ПОЯСНЮВАЛЬНА ЗАПИСКА
ДО КУРСОВОГО ПРОЕКТУ
з дисципліни
«МІКРОПРОЦЕСОРНІ СИСТЕМИ»
«Розробка програми передачі даних через
послідовний порт мікро контролера»
Варіант №30
Розробив студент групи КІ-31
Височанський Ярослав Михайлович
«____»____________________2006 р.
Керівник___________/ Колосов В.Р. /
«____»____________________2006 р.
Оцінка__________________________
Львів-2006
Розрахунок часових затримок для формування імпульсів у програмі
Для формування нуля:
![]()
![]()
![]()
Отже число, яке потрібно загрузити в перший таймер дорівнює 200.
Для формування одиниці:
![]()
Отже число, яке потрібно загрузити в перший таймер, після формування нуля дорівнює 158.
Розрахунок швидкості передачі даних через послідовний порт
Тут ми розраховуєм число, яке потрібно зарядити в таймер/лічильник для генерації потрібної швидкості послідовного порту, в залежності від режиму його роботи та заданої швидкості передачі даних.
Швидкість передачі даних = 1750 біт/с; Режим роботи порту – 3; fclk=22,5МГц
Формула, за допомогою якої визначаємо потрібні дані:
![]()
Підставляємо у формулу дані, задані за умовою. Рахуємо, що SMOD=1.
Примітка: при SMOD=1 швидкість передачі вдвоє більша ніж при SMOD=1

Дані для програмування регістрів спеціальних функцій
1. В регістр управління/статусу SCON встановлюємо одиниці у бітах SM0, SM1 для визначення режиму роботи послідовного порту.
2. В регістр масок переривання IE встановлюємо одиниці в бітах EA, ES для дозволу використання програмою переривань.
3. Накладаємо маску на регістр управління потужністю PCON – 10000000 для встановлення біта SMOD в одиницю.
4. В регістр режиму таймера/лічильника TMOD ми записуємо двійкове число 00100010, для встановлення таймерів у 2-ий режим роботи.
5. В TН0 таймера TMR0 записуємо число 189, для формування заданої швидкості передачі даних.
6. Встановлюємо біт RI в нуль, для використання переривання при прийомі байта даних.
7. В TL1 таймера TMR1 записуємо число 200, для формування нуля із заданою тривалістю на лінії порту.
8. В TL1 таймера TMR1 записуємо число 158, для формування одиниці із заданою тривалістю на лінії порту.
Алгоритм
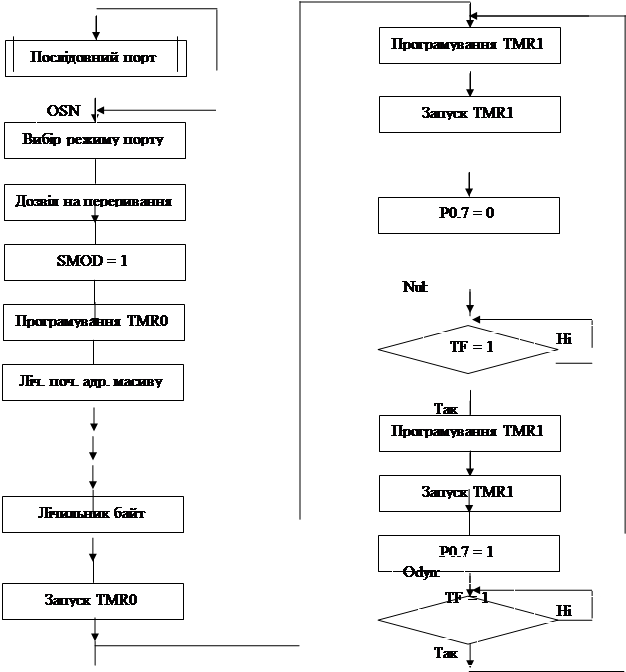 |
4.2 Алгоритм підпрограми обробки переривань від послідовного порту
 |
||||
 |
||||
 |
||||
 |
||||
 |
||||
Лістинг програми
org 0
jmp Osn ;Перехід на основну програму
org 0023h
mov @R0,SBUF ;Зчитування з SBUF в адрес, що знаходиться в R0
inc R0 ;Інкрементуєм лічильник початкової адреси масиву
dec R5 ;Декрементуєм лічильник байт
clr RI ;Скидаємо прапор переривання приймача
reti ;Вихід з підпрограми обробки переривань
Osn: setb SM0 ;Визначаєм режим роботи послідовного порту
setb SM1
clr SM2
setb REN ;Встановлюємо біт дозволу прийому даних
setb EA ;Знімаєм блокування переривань
setb ES ;Встановлюєм дозвіл на переривання від посл. порту
orl PCON,#10000000b ;Встановлюємо біт SMOD в одиницю
mov TMOD,#00100010b ;Визначаємо режим роботи таймерів
mov TH0,#189 ;Загружаєм TMR0
mov R0,#4eh ;Загружаєм лічильник початкової адреси масиву
mov R5,#27 ;Загружаєм лічильник байт
setb TR0 ;Запускаєм TMR0
Zagr: mov TH1,#200 ;Загружаєм TMR1
clr P0.7 ;Встановлюємо на лінії порту P0.7 нуль
setb TR1 ;Запускаєм TMR1
Nul: jnb TF1,Nul ;Перевірка на переповнення TMR1
clr TR1
mov TH1,#158
setb P0.7 ;Встановлюємо на лінії порту P0.7 одиницю
setb TR1
Odyn: jnb TF1,Odyn
clr TR1
jmp Zagr ;Переходимо на мітку Zagr
Список використаної літератури
1. В.В. Сташин, А.В. Урусов, О.Ф. Мологонцева. Проектирование цифровых устройств на однокристальніх микроконтроллерах.
2. А.В. Фрунзе. Микроконтроллеры? Это же просто
Похожие работы
-
Створення мікропроцесорної системи обробки інформації
Місце мікропроцесора в структурі мікропроцесорних приладів, його функції. Інтегральні мікросхеми із великою ступінню інтеграції. Розробка структурної схеми мікропроцесорної системи обробки інформації на основі мікроконтролера ATmega128 та інших мікросхем.
-
Автоматизований облік надходження, зберігання і збуту продукції на товарній базі
Розробка програми "товарна база", призначеної для збереження та перегляду, а також автоматизованої обробки інформації, що надає користувач. Формальна та неформальна постановка задачі. Структура зберігаючих даних. Вихідний код програми, її апробація.
-
Послідовні інтерфейси ПК
Інтерфейс RS-232C як найбільш широко поширений стандартний послідовний метод зв'язку між мікрокомп'ютерами і периферійними пристроями, його призначення та сфери практичного застосування, оцінка основних переваг та недоліків, особливості реалізації.
-
Комп’ютерне моделювання роботи послідовного порта
Формати прийому та передачі даних через послідовний порт, його технічні характеристики, будова і принцип роботи. Характеристика протоколів послідовної передачі. Способи керування портами у WINDOWS95 та WINDOWS XP. Опис алгоритму і функціонування програми.
-
Розробка схеми електричної принципової МР3 програвача – приставки до ПК
Створення схеми електричної принципової МР-3 програвача – приставки до ПК, структурної та загальної схеми. Призначення проектуємого пристрою. Принцип роботи окремих ВІС. Розробка програми тестування роботи пристрою, розрахунок надійності його роботи.
-
Програма контролю наявності зв’язку комп’ютера з пристроєм через паралельний порт протягом 15 секунд
Програма, яка приймає дані з зовнішнього пристрою через паралельний порт і використовується на комп’ютері з паралельним адаптером, операційною системою MS-DOS. Огляд існуючих пристроїв, систем, програмного забезпечення. Реалізація проекту, текст програми.
-
Мікропроцесорна система для підрахунку готової продукції
Функціональні вузли мікроконтролеру, його технічні характеристики і загальна структура. Генератор тактових імпульсів та пристрої пам'яті. Розробка структурної схеми, енергозберігаючі режими роботи, програмні середовища для програмування мікроконтролеру.
-
Мікроконтролери RISC архітектури
Процесор з RISC-архітектурою мають скорочений до мінімуму набір команд. Для реалізації більш складних операцій доводиться комбінувати команди. МК AT90S 2313 – малопотужний 8-розрядний КМОП мікроконтролер, заснований на розширеній AVR RISC-архітектурі.
-
Верифікація послідовного порту
Загальний опис алгоритмів головної програми та процедур запису і зчитування повідомлень на рівні блок-схем, детальний опис розробленої програми на рівні програмного коду. Характеристика процедури відображення стану регістрів. Опис екранних форм програми.
-
Носії інформації, їхній склад та характеристика. Розробка АРМ прибуток підприємства
Види носіїв інформації у комп'ютерних системах. Класифікація носіїв економічної інформації. Перфораційні, магнітні носії, касетні мікрофільми і карткові мікрофіші. Розробка АРМ прибуток підприємства на основі баз данних надходження та вибуття коштів.