Название: Программа распознавания символов
Вид работы: реферат
Рубрика: Информатика и программирование
Размер файла: 86.93 Kb
Скачать файл: referat.me-138527.docx
Краткое описание работы: Белорусский Государственный Университет Информатики и Радиоэлектроники. Контрольная работа по дисциплине «МАГИ» «Программа распознавания символов»
Программа распознавания символов
Белорусский Государственный Университет Информатики и Радиоэлектроники.
Контрольная работа
по дисциплине
«МАГИ»
«Программа распознавания символов»
Выполнил студент группы 500501
Балахонов Е.В.
Задание.
Требуется написать программу, способную распознавать графически представленные символы в виде растрового изображения и преобразовывать в обычный текст.
- платформа: Win32,
- формат графического изображения: Windows Bitmap (BMP), 8 бит,
- шрифт для распознавания: Arial, 16
Выбор средств разработки.
В качестве среды разработки будет использоваться Borland C++ Builder 5.
Распознавание символов.
Этап 1. Выделение контура объекта, определение его границ.
В качестве алгоритма выделения контуров будем использовать алгоритм жука.
Общее описание алгоритма.
Отслеживающие алгоритмы основаны на том, что на изображении отыскивается объект (первая встретившаяся точка объекта) и контур объекта отслеживается и векторизуется. Достоинством данных алгоритмов является их простота, к недостаткам можно отнести их последовательную реализацию и некоторую сложность при поиске и обработке внутренних контуров. Пример отслеживающего алгоритма - "алгоритма жука" - приведен на рис. 5.12. Жук начинает движение с белой области по направлению к черной, Как только он попадает на черный элемент, он поворачивает налево и переходит к следующему элементу. Если этот элемент белый, то жук поворачивается направо, иначе - налево. Процедура повторяется до тех пор, пока жук не вернется в исходную точку. Координаты точек перехода с черного на белое и с белого на черное и описывают границу объекта.
На рис. 1 показана схема работы такого алгоритма.
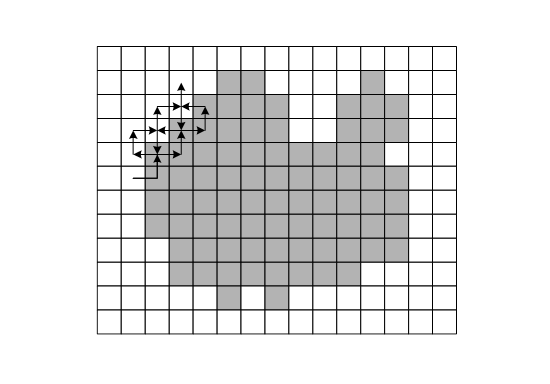
Рис. 1. Схема работы отслеживающего алгоритма «жука».
Этап 2. Построение на основе контура объекта скелетной линии.
При нахождении новой точки контура, рассчитывается расстояние между предыдущей найденной точкой и новой. Если оно превышает некоторую границу (по умолчанию в 5 единиц), она запоминается. К концу построения скелетной линии программа имеет массив координат вершин ломаной, которая является скелетной линией объекта.
Этап 3. Сравнение полученной скелетной линии с списком шаблонов.
После построения скелетной линии производится сравнение ее с списком шаблонов известных символов. При нахождении совпадения, программа записывает в строку найденный символ.
Исходный текст программы.
//---------------------------------------------------------------------------
#include <vcl.h>
#pragma hdrstop
#include <math.h>
#include <fstream.h>
#include "ChildFormUnit.h"
#include "MainFormUnit.h"
#include "AverageFilterDialogFormUnit.h"
#include "OSRFormUnit.h"
//---------------------------------------------------------------------------
#pragma package(smart_init)
#pragma resource "*.dfm"
TChildForm *ChildForm;
TTemplates Templates;
//---------------------------------------------------------------------------
__fastcall TChildForm::TChildForm(TComponent* Owner)
: TForm(Owner)
{
}
//---------------------------------------------------------------------------
bool __fastcall TChildForm::LoadImage(AnsiString FileName)
{
try
{
Image1->Picture->LoadFromFile(FileName);
}
catch (EInvalidGraphic& Exception)
{
AnsiString Error = "Ошибка загрузки файла изображения! Ошибка системы: ";
Error += Exception.Message;
MessageBox(this->Handle, Error.c_str(), "Ошибка", MB_OK | MB_ICONERROR);
return false;
}
if (Image1->Picture->Bitmap->PixelFormat != pf8bit)
{
MessageBox(Handle,"Такой формат файла пока не подерживается...",
"Слабоват я пока...",MB_OK | MB_ICONSTOP | MB_APPLMODAL);
return false;
}
return true;
}
//---------------------------------------------------------------------------
void __fastcall TChildForm::FormClose(TObject *Sender,
TCloseAction &Action)
{
MainForm->DeleteActiveChildForm();
}
//---------------------------------------------------------------------------
void __fastcall TChildForm::AverageFilter()
{
AverageFilterDialogForm = new TAverageFilterDialogForm(this);
if (AverageFilterDialogForm->ShowModal() == mrCancel)
{
delete AverageFilterDialogForm;
return;
}
int Value = atoi(AverageFilterDialogForm->Edit1->Text.c_str());
delete AverageFilterDialogForm;
Byte* PrevisionLine = NULL;
Byte* CurrentLine = NULL;
Byte* NextLine = NULL;
int I = 0, J = 0;
int Summ = 0;
for (I = 0; I <= Image1->Picture->Bitmap->Height - 1; I++)
{
CurrentLine = (Byte*)Image1->Picture->Bitmap->ScanLine[I];
for (J = 0; J <= Image1->Picture->Bitmap->Width - 1; J++)
{
Summ = 0;
if (I > 0)
{
PrevisionLine = (Byte*)Image1->Picture->Bitmap->ScanLine[I - 1];
if (J > 0)
{
Summ += PrevisionLine[J - 1];
}
Summ = Summ + PrevisionLine[J];
if (J + 1 < Image1->Picture->Bitmap->Width)
{
Summ += PrevisionLine[J + 1];
}
}
if (J > 0)
{
Summ += CurrentLine[J - 1];
}
Summ += CurrentLine[J];
if (J + 1 < Image1->Picture->Bitmap->Width)
{
Summ += CurrentLine[J + 1];
}
if (I + 1 < Image1->Picture->Bitmap->Height)
{
NextLine = (Byte*)Image1->Picture->Bitmap->ScanLine[I + 1];
if (J > 0)
{
Summ += NextLine[J - 1];
}
Summ += NextLine[J];
if (J + 1 < Image1->Picture->Bitmap->Width)
{
Summ += NextLine[J + 1];
}
}
if ((int)(Summ / 9) <= Value)
CurrentLine[J] = (Byte) Summ / 9;
}
}
Image1->Visible = false;
Image1->Visible = true;
}
//---------------------------------------------------------------------------
// Расстояние между двумя точками
int Distance(TVertex& V1, TVertex& V2)
{
int a = abs(V1.Y - V2.Y);
int b = abs(V1.X - V2.X);
return sqrt(a*a + b*b);
}
//---------------------------------------------------------------------------
void __fastcall TChildForm::OSR()
{
// Пороговое расстояние для простроения упрощенной фигуры
const int Treshold = 5;
// Сюда сохраняется результат распознования
AnsiString Result;
// Отладочная форма с изображением для работы
OSRForm = new TOSRForm(this);
// Направления движения жука
typedef enum {North, East, South, West} TDirectional;
TDirectional Direct;
// Координаты первой встречи с текущим объектом
int X,Y;
// Временно их используем для задания нового размера рабочего изображения
X = OSRForm->Width - OSRForm->Image1->Width;
Y = OSRForm->Height - OSRForm->Image1->Height;
OSRForm->Image1->Picture->Bitmap->Assign(Image1->Picture->Bitmap);
OSRForm->Width = OSRForm->Image1->Width + X;
OSRForm->Height = OSRForm->Image1->Height + Y;
OSRForm->Image1->Canvas->Rectangle(0, 0, OSRForm->Image1->Width - 1,
OSRForm->Image1->Height - 1);
Graphics::TBitmap* FromImage = Image1->Picture->Bitmap;
Graphics::TBitmap* ToImage = OSRForm->Image1->Picture->Bitmap;
// Текущие координаты маркера
int cX,cY;
// Максимальные координаты, которые занимает фигура
int MaxX = 0;
int MaxY = FromImage->Height;
// От этой координаты начинается новое сканирование по Y
int BeginY = 0;
// Обрабатываемые линии
Byte *Line, *ToLine;
char Symb = 'А';
// Текущий байт
Byte B = 0;
bool SkipMode = false;
while (true)
{
// Список координат текущего объекта
TShapeVector ShapeVector;
// Временная структура координат точки
TVertex Vertex;
// Поиск любого объекта
// Идем до тех пор, пока не встретим черную область
for (X = MaxX; X < FromImage->Width; X++)
{
for (Y = BeginY; Y < MaxY; Y++)
{
Line = (Byte*)FromImage->ScanLine[Y];
if (Line[X] < 255)
goto FindedLabel;
}
if ((X + 1 == FromImage->Width) && (Y == FromImage->Height))
{
X++;
goto FindedLabel;
}
// Если прошли до самого правого края, расширяем границы поиска до низа
if (X + 1 == FromImage->Width)
{
X = 0;
MaxX = 0;
BeginY = MaxY;
MaxY = FromImage->Height;
}
}
FindedLabel:
// Если не нашли ни одного черного пиксела, то выходим из процедуры
if ((X == FromImage->Width) && (Y == FromImage->Height))
break;
// Сначала задача найти максимальные границы обнаруженной фигуры,
// чтобы потом от нее начинать строить скелет
// Также ищем самую верхнюю точку фигуры, для начала построения
int MinX = Image1->Picture->Width; // Самая левая координата
MaxX = 0;
MaxY = 0;
// Самая верхняя точка
TVertex TopPoint;
TopPoint.Y = Image1->Picture->Height;
// Поворачиваем налево (новое направление - север)
cX = X;
cY = Y - 1;
Direct = North;
Line = (Byte*)FromImage->ScanLine[cY];
// Пока не придем в исходную точку, выделяем контур объекта
while ((cX != X) || (cY != Y))
{
// В зависимости от текущего направления движения жука
switch (Direct)
{
// Север
case North:
{
B = Line[cX];
// Если элемент "черный", поворачиваем снова "налево"
if (B < 255)
{
Direct = West;
cX--;
// Может это самая левая координата?
if (MinX > cX)
MinX = cX;
}
// Иначе поворачиваем "направо"
else
{
Direct = East;
cX++;
if (MaxX < cX)
MaxX = cX;
}
}
break;
// Восток
case East:
{
B = Line[cX];
// Если элемент "черный", поворачиваем снова "налево"
if (B < 255)
{
Direct = North;
cY--;
Line = (Byte*)FromImage->ScanLine[cY];
// Может это самая верхняя точка?
if (TopPoint.Y > cY)
{
TopPoint.Y = cY;
TopPoint.X = cX;
}
}
// Иначе поворачиваем "направо"
else
{
Direct = South;
cY++;
Line = (Byte*)FromImage->ScanLine[cY];
if (MaxY < cY)
MaxY = cY;
}
}
break;
// Юг
case South:
{
B = Line[cX];
// Если элемент "черный", поворачиваем снова "налево"
if (B < 255)
{
Direct = East;
cX++;
if (MaxX < cX)
MaxX = cX;
}
// Иначе поворачиваем "направо"
else
{
Direct = West;
cX--;
// Может это самая левая координата?
if (MinX > cX)
MinX = cX;
}
}
break;
// Запад
case West:
{
B = Line[cX];
// Если элемент "черный", поворачиваем снова "налево"
if (B < 255)
{
Direct = South;
cY++;
Line = (Byte*)FromImage->ScanLine[cY];
if (MaxY < cY)
MaxY = cY;
}
// Иначе поворачиваем "направо"
else
{
Direct = North;
cY--;
Line = (Byte*)FromImage->ScanLine[cY];
// Может это самая верхняя точка?
if (TopPoint.Y > cY)
{
TopPoint.Y = cY;
TopPoint.X = cX;
}
}
}
}
}
TopPoint.X++;
if ((!TopPoint.X) && (!TopPoint.Y))
{
TopPoint.X = X;
TopPoint.Y = Y;
}
else
{
X = TopPoint.X;
Y = TopPoint.Y;
}
// Постройка скелета
ToLine = (Byte*)ToImage->ScanLine[Y];
ToLine[X] = 0;
// Поворачиваем налево (новое направление - юг)
cX = X;
cY = Y;
Vertex.X = X;
Vertex.Y = Y;
ShapeVector.push_back(Vertex);
Direct = East;
Line = (Byte*)FromImage->ScanLine[cY];
// Пока не придем в исходную точку, выделяем контур объекта
do
{
// В зависимости от текущего направления движения жука
switch (Direct)
{
// Север
case North:
{
B = Line[cX];
// Если элемент "черный", поворачиваем снова "налево"
if (B < 255)
{
ToLine = (Byte*)ToImage->ScanLine[cY];
ToLine[cX] = 0;
Vertex.X = cX;
Vertex.Y = cY;
if (Distance(Vertex, ShapeVector[ShapeVector.size() - 1]) >= Treshold)
ShapeVector.push_back(Vertex);
Direct = West;
cX--;
}
// Иначе поворачиваем "направо"
else
{
Direct = East;
cX++;
}
}
break;
// Восток
case East:
{
B = Line[cX];
// Если элемент "черный", поворачиваем снова "налево"
if (B < 255)
{
ToLine = (Byte*)ToImage->ScanLine[cY];
ToLine[cX] = 0;
Vertex.X = cX;
Vertex.Y = cY;
if (Distance(Vertex, ShapeVector[ShapeVector.size() - 1]) >= Treshold)
ShapeVector.push_back(Vertex);
Direct = North;
cY--;
Line = (Byte*)FromImage->ScanLine[cY];
}
// Иначе поворачиваем "направо"
else
{
Direct = South;
cY++;
Line = (Byte*)FromImage->ScanLine[cY];
}
}
break;
// Юг
case South:
{
B = Line[cX];
// Если элемент "черный", поворачиваем снова "налево"
if (B < 255)
{
ToLine = (Byte*)ToImage->ScanLine[cY];
ToLine[cX] = 0;
Vertex.X = cX;
Vertex.Y = cY;
if (Distance(Vertex, ShapeVector[ShapeVector.size() - 1]) >= Treshold)
ShapeVector.push_back(Vertex);
Direct = East;
cX++;
}
// Иначе поворачиваем "направо"
else
{
Direct = West;
cX--;
}
}
break;
// Запад
case West:
{
B = Line[cX];
// Если элемент "черный", поворачиваем снова "налево"
if (B < 255)
{
ToLine = (Byte*)ToImage->ScanLine[cY];
ToLine[cX] = 0;
Vertex.X = cX;
Vertex.Y = cY;
if (Distance(Vertex, ShapeVector[ShapeVector.size() - 1]) >= Treshold)
ShapeVector.push_back(Vertex);
Direct = South;
cY++;
Line = (Byte*)FromImage->ScanLine[cY];
}
// Иначе поворачиваем "направо"
else
{
Direct = North;
cY--;
Line = (Byte*)FromImage->ScanLine[cY];
}
}
}
} while ((cX != X) || (cY != Y));
Vertex.X = X;
Vertex.Y = Y;
ShapeVector.push_back(Vertex);
ToImage->Canvas->Pen->Color = clRed;
ToImage->Canvas->MoveTo(ShapeVector[0].X, ShapeVector[0].Y);
for (UINT i = 1; i < ShapeVector.size(); i++)
{
ToImage->Canvas->LineTo(ShapeVector[i].X, ShapeVector[i].Y);
}
for (UINT i = 0; i < ShapeVector.size(); i++)
{
ShapeVector[i].X -= MinX;
ShapeVector[i].Y -= Y;
}
/*
if (Symb == 'Й')
{
Symb++;
}
if (Symb == 'а')
{
// Symb = 'A';
break;
}
if ((Symb != 'Ы') && (!SkipMode))
{
AnsiString FileName = ExtractFilePath(Application->ExeName) + "TPL\";
FileName += Symb;
ofstream OutFile(FileName.c_str());
for (UINT i = 0; i < ShapeVector.size(); i++)
{
OutFile << IntToStr(ShapeVector[i].X).c_str() << endl;
OutFile << IntToStr(ShapeVector[i].Y).c_str() << endl;
}
OutFile.close();
Symb++;
}
else
{
if (SkipMode)
{
SkipMode = false;
Symb++;
}
else if (Symb == 'Ы')
SkipMode = true;
}
*/
TTemplate* Template = FindTemplate(ShapeVector);
if (Template)
Result += Template->Symb;
}
//OSRForm->Show();
delete OSRForm;
Memo1->Text = Result;
}
//---------------------------------------------------------------------------
TTemplate* FindTemplate(TShapeVector Vec)
{
TTemplate Template;
Template.Vec = Vec;
for (UINT i = 0; i < Templates.size(); i++)
{
if (Templates[i] == Template)
return &Templates[i];
}
return NULL;
}
//---------------------------------------------------------------------------
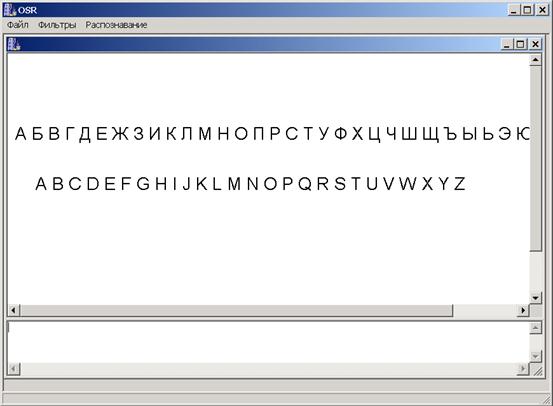
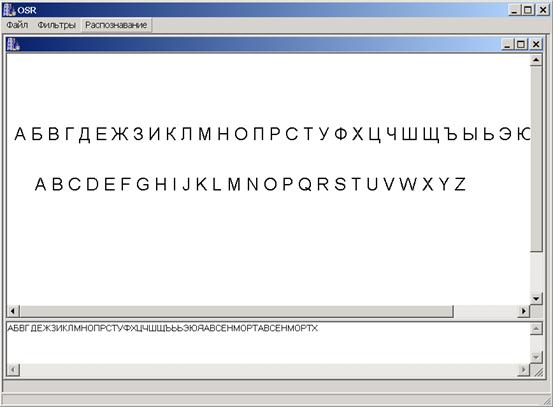
Снапшоты программы.
Начало работы
Произведено распознавание.
Похожие работы
-
Программы распознавания речи
Не думайте, что если вы поставите программу распознавания речи, то вам больше не понадобятся клавиатура и мышь, однако работа на ПК существенно облегчится.
-
Распознавание ключевых слов в потоке речи при помощи фонетического стенографа
В статье рассматривается использование фонетического стенографа для распознавания ключевых слов в потоке речи. Для моделирования фонем используются скрытые Марковские модели. Ключевое слово задается последовательностью фонем в виде транскрипции слова.
-
Тестирование ППП автоматизации учета основных средств
Московский государственный университет сервиса Поволжский технологический институт сервиса Кафедра «Прикладная информатика в экономике» КОНТРОЛЬНАЯ РАБОТА
-
Алгоритмы выделения контуров
Белорусский Государственный Университет Информатики и Радиоэлектроники. Контрольная работа по дисциплине «МАТИ» Выполнил студент группы 500501
-
Дискретное преобразование Фурье
Разработка функции вычисления дискретного преобразования Фурье от входного вектора. Исследование свойств симметрии ДПФ при мнимых, четных и нечетных входных сигналах. Применение обратного преобразования Фурье для генерации периодической функции косинуса.
-
Размножение документов с помощью компьютера
Классификация сканеров по способу формирования изображения. Ручные, настольные, комбинированные сканеры. Принцип действия планшетного сканера. Сенсорные технологии в сканерах: CCD, CIS. Программа Abbyy FineReader как пример системы распознавания символов.
-
Расчет цифровых фильтров с бесконечными импульсными характеристиками
Расчет аналогового фильтра-прототипа низких частот. Получение дискретизированного аналога фильтра Чебышева при помощи метода билинейного z-преобразования. Влияние усечения коэффициентов передаточной функции на амплитудно-частотную характеристику.
-
Планирование работ в вычислительных системах по критерию минимального суммарного времени выполнения работ
Составление алгоритма и программы для факторизации целого числа N с помощью ро-метода Полларда. Краткое описание данного метода: составление последовательности, вычисление разности и наибольшего общего делителя. Алгоритм работы и листинг программы.
-
Нейронная сеть Хемминга
Программная реализация статической нейронной сети Хемминга, распознающей символы текста. Описание реализации алгоритма. Реализация и обучение сети, входные символы. Локализация и масштабирование изображения, его искажение. Алгоритм распознавания текста.
-
Усложнение решающего правила при управлении в задачах распознавания образов
Рассматривается один из возможных принципов усложнения решающего правила непрерывного пространства признаков, порождаемого опорными объектами конкретного образа.