Название: Особенности входа в поворот многоосных автомобилей с различными схемами управляемых осей
Вид работы: реферат
Рубрика: Транспорт
Размер файла: 106.95 Kb
Скачать файл: referat.me-337389.docx
Краткое описание работы: Процесс входа в поворот многоосных автомобилей с различными схемами расположения управляемых осей. Угловые скорость и ускорение продольной оси автомобиля, изменение радиуса кривизны траектории движения в зависимости от угла поворота управляемых колес.
Особенности входа в поворот многоосных автомобилей с различными схемами управляемых осей
Значительную часть общего пробега автомобиля составляет движение по криволинейной траектории. При этом способность автомобиля совершать такие маневры как "переставка", "вход в поворот" и "рывок руля", существенным образом определяет его безопасность. Особенно остро эти вопросы касаются растущего парка многоосных автомобилей, увеличенная база которых потенциально снижает их управляемость и поворачиваемость, создавая предпосылки для совершения дорожно-транспортных происшествий.
В работе рассматривается процесс входа в поворот многоосных автомобилей с различными схемами расположения управляемых осей, как основополагающий для оценки их управляемости и поворачиваемости.
Анализ исследований, проведенных Д.А. Антоновым, П.В. Аксеновым, Я.Е. Форобиным, М.А. Подригало, В.П. Волковым, Е.Е. Александровым, В.П. Сахно, А.С. Литвиновым, В.В. Стельмащук, О.А., и др., показывает, что известные математические модели для оценки управляемости и поворачиваемости при входе в поворот многоосных автомобилей с различными схемами управляемых осей сложно использовать на стадии проектирования. При этом большинство авторов сходятся в том, что для оценивания криволинейного движения автомобиля должны использоваться такие параметры, как угловые скорость и ускорение продольной оси автомобиля, изменение радиуса кривизны траектории движения в зависимости от угла поворота управляемых колес (УК).
Целью настоящего исследования являлась разработка основ методики оценки динамической поворачиваемости многоосных автомобилей с различными схемами расположения управляемых осей при входе в поворот на стадии проектирования.
автомобиль управляемая ось поворот
В качестве объекта исследования рассматривались четырехосные автомобили с двумя схемами управляемых осей: автомобиль с двумя передними управляемыми осями - схема 1-2-00 (рисунок 1) и автомобиль с передней и задней управляемыми осями - с схема 1-00-4 (рисунок 2).
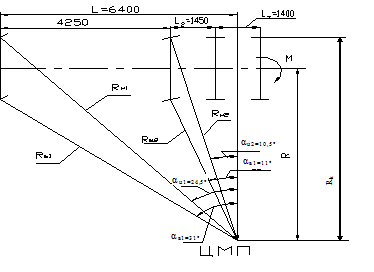
Рис.1. Схема автомобиля 1-2-00
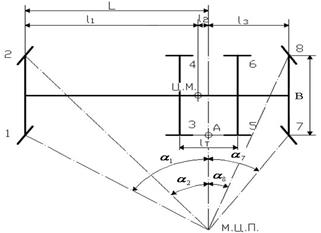
Рис.2. Схема автомобиля 1-00-4
На каждое из УК каждой оси действуют свои силы и моменты. При этом каждое УК отклоняется на определенный угол увода, которые в совокупности существенно влияют на действительную кривизну траектории движения. Следовательно, для оценки входа в поворот многоосного автомобиля предпочтительно использовать математическую модель с алгоритмом определения действительного радиуса кривизны траектории движения с учетом увода, предложенными в работе [1]. Указанные модель и алгоритм позволяют еще на стадии проектирования с достаточной точностью аналитически определить параметры криволинейного движения многоосных автомобилей за счет определения скоростного момента и момента сопротивления криволинейному движению на каждом колесе транспортного средства.
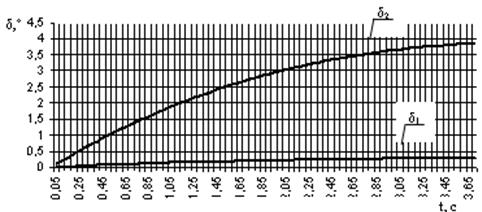
Рис.3. Изменение углов увода во времени первой и четвертой оси автомобиля со схемой 1-2-00
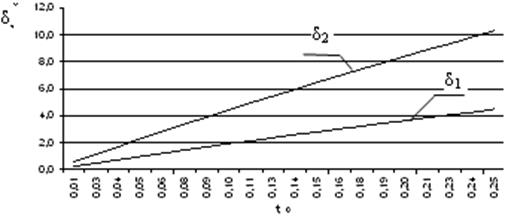
Рис.4. Изменение углов увода во времени первой и второй оси автомобиля со схемой 1-00-4
На рисунке 3 и 4 показано изменение угла увода первой и второй осей у автомобилей с различными схемами управления. Представленные зависимости свидетельствуют о том, что у обоих автомобилей углы увода второй управляемой оси значительно больше, чем первой. Именно этот факт и вызывает больший износ шин второй управляемой оси на образцах автомобилей КрАЗ-7140 Н6.
Для оценки криволинейного движения автомобиля важно определить насколько траектория, задаваемая водителем, будет отличаться от действительной траектории. Поэтому для сравнительной оценки поворачиваемости многоосных автомобилей с различными схемами управляемых осей более корректно использовать не действительные радиусы кривизны траектории, а безразмерные величины: отношение кинематического радиуса (на жестких шинах) к действительному (с учетом углов увода всех УК) [2]:
 , (1)
, (1)
где ![]() - расстояние между управляемыми осями;
- расстояние между управляемыми осями;
![]() - смещение центра мгновенного поворота от второй управляемой оси;
- смещение центра мгновенного поворота от второй управляемой оси;
![]() - угол увода внутренного колеса передней управляемой оси;
- угол увода внутренного колеса передней управляемой оси;
![]() - угловая скорость вращения внутреннего УК первой управляемой оси вокруг оси шкворня;
- угловая скорость вращения внутреннего УК первой управляемой оси вокруг оси шкворня;
![]() - передаточное отношение;
- передаточное отношение;
![]() - время.
- время.
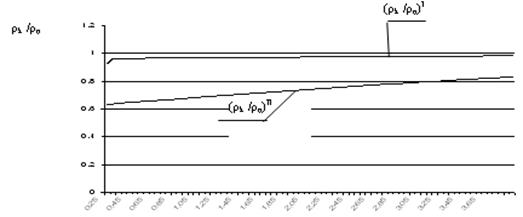
Изменение отношения радиусов кривизны траектории во времени для рассматриваемых автомобилей представлено на рисунках 5 и 6.
|
Рис.5. Изменение отношения радиусов кривизны траектории автомобиля со схемой 1-2-00
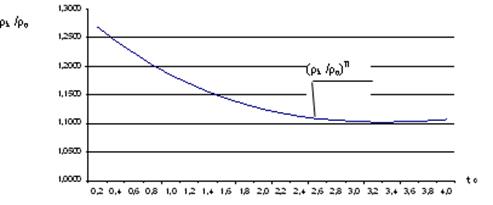
Рис.6. Изменение отношения радиусов кривизны траектории автомобиля со схемой 1-00-4
Известно, что наилучшей управляемостью обладают автомобили, имеющие нейтральную поворачиваемость. Это значит, что отношение ρк / ρд должно стремиться к единице для обеих схем расположения управляемых осей.
Из рисунка 5 видно, что для схемы управления автомобилем по схеме 1-2-00 это отношение для первой управляемой оси близко к единице и, практически, постоянно на всем диапазоне времени входа в поворот, для второй оси - ρк / ρд = var ≠ 1. Анализ представленных данных свидетельствует о том, что необходимо увеличить углы поворота УК второй оси и изменить взаимосвязь углов поворота внуреннего и внешнего УК второй оси. Для этих целей может быть использована модель, предложенная в работе [1], что было подтверждено экспериментально с высокой степенью сходимости результатов для опытного образца КрАЗ-7140 Н6 с колесной формулой 8×6.
Автомобиль со схемой управления 1-00-4 (рисунок 6) обладает избыточной поворачиваемостью. Особенно она велика в начальный момент входа в поворот. Следовательно, необходимо организовать запаздывание поворота УК второй оси во времени на величину, для определения которой на стадии проектирования может быть использована математическая модель [1].
Используя зависимости угловой скорости и углового ускорения продольной оси автомобиля от времени при входе в поворот [1]:
![]() , (2),
, (2),  , (3)
, (3)
где ρi - радиус кривизны траектории;
Vi - скорость автомобиля,
были получены результаты, представленные на рисунках 7 и 8.
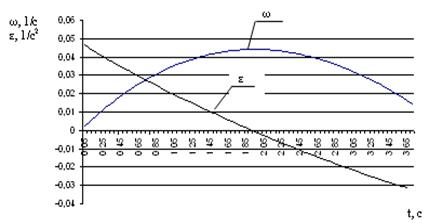
Рис.7. Изменение угловой скорости и углового ускорения вовременипродольной оси автомобиля со схемой 1-2-00
Анализ рисунков 7 и 8 показывает, что вначале угловое ускорение поворота продольной оси автомобиля положительно до определенного момента, а затем меняет свой знак на противоположный. Это значит, что инерционный момент автомобиля Мj =-εIA меняет свой знак в процессе поворота. В начальный момент входа в поворот он способствует увеличению углов увода, как на первой, так и на второй управляемой оси. Однако более прогрессивно угол увода в зависимости от Мj возрастает на второй управляемой оси, что при схеме 1-00-4 приводит к образованию дополнительной избыточной поворачиваемости и, следовательно, к потере устойчивости. Во второй фазе входа в поворот, когда ε со знаком "-", момент Мj способствует уменьшению избыточной поворачиваемости.
Угловое ускорение автомобиля со схемой управления 1-00-4 в 1,63 раза больше углового ускорения автомобиля со схемой 1-2-00 в начальный момент входа в поворот, что является одной из причин потери устойчивости автомобиля со схемой УК 1-00-4.
Полученные результаты позволяют сформулировать следующие выводы.
1. Угол увода УК второй оси, многоосного автомобиля с различными схемами управления осей больше чем первой оси, что является причиной повышенного износа шин колес второй управляемой оси.
2. Угловое ускорение поворота продольной оси четырехосного автомобиля при входе в поворот может менять свой знак и явиться причиной потери устойчивости.
3. Для улучшения управляемости и устойчивости четырехосных автомобилей с различными схемами расположения управляемых осей необходимо обеспечить нейтральную поворачиваемость путем рационального выбора углов поворота УК.
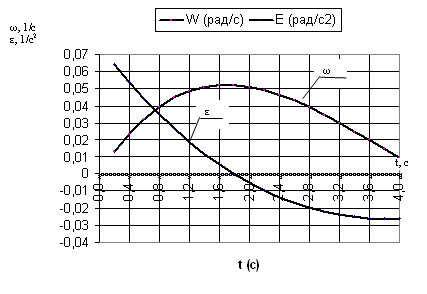
Рис.8. Изменение угловой скорости и углового ускорения во времени продольной оси автомобиля со схемой 1-00-4
4. Угол увода УК второй оси, многоосного автомобиля с различными схемами управления осей больше чем первой оси, что является причиной повышенного износа шин колес второй управляемой оси.
5. Угловое ускорение поворота продольной оси четырехосного автомобиля при входе в поворот может менять свой знак и явиться причиной потери устойчивости.
6. Для улучшения управляемости и устойчивости четырехосных автомобилей с различными схемами расположения управляемых осей необходимо обеспечить нейтральную поворачиваемость путем рационального выбора углов поворота УК.
7. Четырехосный автомобиль со схемой расположения управляемых осей 1-2-00 обладает недостаточной, а со схемой 1-00-4 - избыточной поворачиваемостью. Устранение этого отрицательно момента возможно за счет изменения углов поворота УК второй управляемой оси обоих автомобилей с учетом углов увода, например, путем введения в систему рулевого управления автоматического устройства.
8. Изменение отношения кинематического радиуса кривизны траектории к действительному достаточно полно характеризует поворачиваемости автомобиля и может использоваться в качестве ее оценочного параметра.
Литература
1. Редчиц В.В., Головина Е.В., Гораш К.И. Некоторые особенности динамики входа в поворот трехосного автомобиля // Научный вестник КУЭИТУ "Новые технологии". - Кременчуг, 2009. - № 11.
2. Теория движения боевых колесных машин / Под ред. Беспалова А.А. - М.: ВАБТВ, 1993. - 386 с.
Похожие работы
-
Управляемость автомобиля. Параметры маневра
Расчет показателей управляемости и маневренности автомобиля ВАЗ-21093. Блокировка колес при торможении. Усилители рулевого управления. Установка, колебания и стабилизация управляемых колес. Кузов автомобиля, подвеска и шины. Увод колес автомобиля.
-
Расчёт параметров безопасности автомобиля
Министерство образования и науки Российской Федерации Федеральное агентство по образованию ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра менеджмент на автомобильном транспорте
-
Изучение устройства карданной передачи
ЛАБОРАТОРНАЯ РАБОТА №3 ИЗУЧЕНИЕ УСТРОЙСТВА КАРДАННОЙ ПЕРЕДАЧИ Цель работы: изучить назначение, устройство, кинематические зависимости карданных шарниров, изучить понятие критической часты вращения карданного вала. Карданные механизмы (карданы) представляют собой устройства, которые способны передавать вращающий момент или вращательное движение от одного вала к другому при фиксированных или переменных углах пересечения их осей.
-
Рулевое управление автомобиля КамАЗ–5320 и трактора МТЗ–80 с гидроусилителем
Назначение и общая характеристика рулевого управления автомобиля КамАЗ–5320 и колесного трактора МТЗ–80 с гидроусилителем. Основные регулировки рулевого управления. Возможные неисправности и техническое обслуживание. Насос гидравлического усилителя.
-
Мост автомобиля
Изучение назначения, устройства, принципа действия и конструкции моста автомобиля, его составные части: тормозной барабан, ступица, рулевая тяга и маслоотражатель. Характеристика типов мостов: ведущие, управляемые, управляемые ведущие и поддерживающие.
-
Эффективность оптимизации параметров систем безопасности движения автотранспортных средств
Определение оптимальных величин критерия качества рулевого управления автотранспортных средств: режим движения по прямолинейной траектории, вход в поворот и выход из него, фиксированное рулевое колесо. Расчет эффективности затрат на поддержание качества.
-
Исследование рабочих процессов в рулевом приводе автомобилей
Расчет пути трения относительного скольжения элементов шарниров. Анализ зависимости изменения схождения управляемых колёс от зазоров в сопряжениях и усилия в рулевом приводе. Выделение критериев, описывающих эксплуатационное состояние автомобиля.
-
Проектирование тягача лесной промышленности
Расчет компоновки лесовозного тягача. Обоснование схемы рулевого управления и расчет параметров рулевой трапеции проектируемого тягача. Внешняя скоростная характеристика двигателя тягача. Расчет характеристик системы двигатель–гидротрансформатор.
-
Рабочие процессы и элементы расчета механизмов автомобиля Ford Fiesta
Министерство образования Российской Федерации Южно-Уральский Государственный университет Кафедра «Автомобильный транспорт» Курсовая работа на тему:
-
Автомобили эксплуатационные свойства
Федеральное агентство по образованию ГОУ ВПО Курский государственный технический университет Кафедра «Автомобили и автомобильное хозяйство» Отчет по практическим занятиям по дисциплине