Название: Изучение устройства и принципа действия системы автоматического невелирования асфальтоу
Вид работы: реферат
Рубрика: Транспорт
Размер файла: 554.23 Kb
Скачать файл: referat.me-338863.docx
Краткое описание работы: Лабораторная работа № 3 Изучение устройства и принципа действия системы автоматического невелирования асфальтоукладчика Цель работы: изучить устройство и принцип действия системы автоматического невелирования асфальтоукладчика
Изучение устройства и принципа действия системы автоматического невелирования асфальтоу
Лабораторная работа № 3
Изучение устройства и принципа действия системы автоматического невелирования асфальтоукладчика
Цель работы: изучить устройство и принцип действия системы автоматического невелирования асфальтоукладчика
Для обеспечения ровности и поперечного уклона асфальтобетонного покрытия на асфальтоукладчиках применяется автоматическая система «Стабилослой-20» (рис. 3.1), работающая от двух или одного копира, в качестве которых может быть использована натянутая вдоль полотна дороги проволока, трос или лыжа, скользящая по уже уложенному покрытию или основанию.
При работе системы от двух копиров с обеих сторон рамы рабочих органов устанавливаются два датчика ДЩБ 6. В этом случае задание угла наклона рамы в поперечном направлении осуществляется за счет разницы положения по высоте одной стороны рамы относительно другой.
Этот способ применяется при работе широкозахватных асфальтоукладчиков с шириной укладки 9—12 м, когда датчик ДКБ не может обеспечить заданной точности.
При работе системы от одного копира датчик ДЩБ устанавливается по одну сторону рамы, а выдерживание заданного угла наклона обеспечивает датчик ДКБ, устанавливаемый на середине поперечной балки укладчика.
Щуп 5 датчика ДЩБ, скользящий по копиру 4, поворачивается на угол соответственно тому, поднимается или опускается асфальтоукладчик при своем движении относительно копира при наезде на неровности основания. Если отклонение щупа датчика превышает его зону нечувствительности, то датчик вырабатывает электрический сигнал, который поступает в блок управления 2, а затем на электромагниты распределителя 8, включающие гидроцилиндры 7 привода рамы 3 рабочих органов. Гидроцилиндры перемещают раму в сторону уменьшения электрического сигнала.
Если рама рабочих органов изменит свое положение в поперечном направлении при работе системы от двух копиров, сигнал вырабатывается вторым датчиком ДЩБ и соответствующий гидроцилиндр перемещает по вертикали край рамы, восстанавливая угол наклона.
При работе системы от одного копира при изменении угла наклона сигнал вырабатывается датчиком ДКБ 1 и подается на золотник гидроцилиндра.
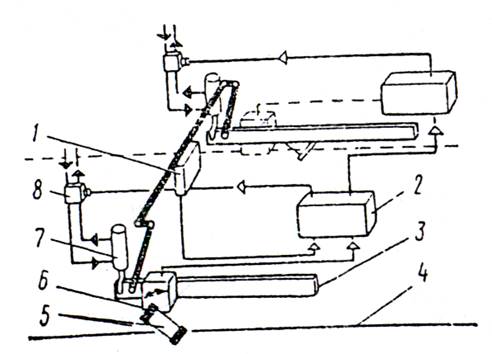
Рисунок- 3.1. Схема расположения аппаратуры системы «Стабилослой-20» на асфальтоукладчике:
1—датчик углового положения рамы рабочих органов; 2 — блок управления; 3— рама рабочих органов; 4--копир; 5 — щуп;
б — датчик щуповой; 7 — гидроцилиндр рамы рабочих органов;
8 — электрогидрораспределитель.
Похожие работы
-
Изучение устройства карданной передачи
ЛАБОРАТОРНАЯ РАБОТА №3 ИЗУЧЕНИЕ УСТРОЙСТВА КАРДАННОЙ ПЕРЕДАЧИ Цель работы: изучить назначение, устройство, кинематические зависимости карданных шарниров, изучить понятие критической часты вращения карданного вала. Карданные механизмы (карданы) представляют собой устройства, которые способны передавать вращающий момент или вращательное движение от одного вала к другому при фиксированных или переменных углах пересечения их осей.
-
Проектирование технологических процессов восстановления деталей
Министерство образования и науки Украины Севастопольский национальный технический университет Кафедра автомобильного транспорта ЛАБОРАТОРНАЯ РАБОТА
-
Железнодорожная автоматика и телемеханика 2
Федеральное государственное автономное образовательное учреждение высшего профессионального образования «СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
-
Автомобили
Рессорная подвеска и ее упругая характеристика. Кинематическая схема и характеристика стального упругого элемента с резиновым буфером-ограничителем. Устройство и принцип действия телескопических гидравлических амортизаторов и их силовая характеристика.
-
Система управления подвижным составом
Лабораторная работа № I. ИЗУЧЕНИЕ МЕТОДОВ И СХЕМ ИСПЫТАНИЙ ТЯГОВЫХ ЭЛЕКТРИЧЕСКИХ МАШИН Цель работы: Изучить и сравнить между собой различные методы и схемы испытаний ТЭМ, получить практические навыки управления испытательными стендами, ознакомиться с принципами их анализа и расчета.
-
Исследование системы автоматического регулирования угловой скорости двигателя внутреннего сгорания
Лабораторная работа №4 Исследование системы автоматического регулирования угловой скорости двигателя внутреннего сгорания (дизеля) Цель работы: изучить САР угловой скорости двигателя внутреннего сгорания (дизеля).
-
Мост автомобиля
Изучение назначения, устройства, принципа действия и конструкции моста автомобиля, его составные части: тормозной барабан, ступица, рулевая тяга и маслоотражатель. Характеристика типов мостов: ведущие, управляемые, управляемые ведущие и поддерживающие.
-
Регулятор давления АК-11Б
Ознакомление с конструкцией и принципом действия регулятора давления АК-11Б в отечественных электровозах и мотор-вагонных подвижных составах. Основное назначение устройства - автоматическое поддержание давления сжатого воздуха в установленном диапазоне.
-
Тормозная рычажная передача 4х-осного пассажирского вагона
Рычажная передача пассажирского вагона, ее отличие от передач грузовых вагонов. Принцип действия тормозной рычажной передачи 4х-осного пассажирского вагона, ее испытание. Ручная, полуавтоматическая и автоматическая регулировка рычажной передачи.
-
Кран машиниста №394
Описание принципа действия и конструктивного устройства крана машиниста №394. Его назначение: управление тормозами поезда путем изменения давления в тормозной магистрали или полярности тока в электрической линии при электропневматическом торможении.