Название: Окремі випадки задач оптимального стохастичного керування
Вид работы: реферат
Рубрика: Коммуникации и связь
Размер файла: 389.3 Kb
Скачать файл: referat.me-167920.docx
Краткое описание работы: 1. Зовнішній інтеграл Функції можуть бути довільними, а математичні сподівання можна обчислювати, якщо як функція від є вимірною. Якщо ж оптимальна стратегія, отримана в результаті оптимізації, виявиться невимірною, то і функція
Окремі випадки задач оптимального стохастичного керування
ОКРЕМІ ВИПАДКИ ЗАДАЧ ОПТИМАЛЬНОГО СТОХАСТИЧНОГО КЕРУВАННЯ
1.Зовнішній інтеграл
Функції ![]() і
і ![]() можуть бути довільними, а математичні сподівання можна обчислювати, якщо
можуть бути довільними, а математичні сподівання можна обчислювати, якщо ![]() як функція від
як функція від ![]() є вимірною.
є вимірною.
Якщо ж оптимальна стратегія, отримана в результаті оптимізації, виявиться невимірною, то і функція ![]() може виявитися невимірною. У цьому випадку математичне сподівання невизначено.
може виявитися невимірною. У цьому випадку математичне сподівання невизначено.
Для розв’язання цієї проблеми застосовують два підходи. Перший полягає в накладенні на функції ![]() і
і ![]() таких обмежень, які забезпечували б вимірність підінтегральної функції на кожному кроці оптимізації
таких обмежень, які забезпечували б вимірність підінтегральної функції на кожному кроці оптимізації ![]() : функції
: функції ![]() і
і ![]() ,
, ![]() , повинні бути неперервними по своїх аргументах і повинна існувати щільність імовірності розподілу випадкової величини
, повинні бути неперервними по своїх аргументах і повинна існувати щільність імовірності розподілу випадкової величини ![]() , а множини
, а множини ![]() значень припустимих стратегій повинні бути компактними.
значень припустимих стратегій повинні бути компактними.
На жаль, на практиці ці вимоги не завжди виконуються. Тому другий підхід пов’язаний з використанням зовнішнього інтеграла.
Позначимо через ![]() простір елементарних подій, що є довільною множиною, а
простір елементарних подій, що є довільною множиною, а ![]() – деяка система підмножин множини
– деяка система підмножин множини ![]() .
.
Математичним сподіванням випадкової величини ![]() , заданої на імовірнісному просторі
, заданої на імовірнісному просторі ![]() , називається число
, називається число  , якщо інтеграл з правої частини існує.
, якщо інтеграл з правої частини існує.
Нехай ![]() і
і ![]() – борелівські простори,
– борелівські простори, ![]() ,
, ![]() є
є ![]() -алгеброю в
-алгеброю в ![]() . Функція
. Функція ![]() називається
називається ![]() -вимірною, якщо
-вимірною, якщо ![]() для будь-якої множини
для будь-якої множини ![]() . Тут
. Тут ![]() – борелівська
– борелівська ![]() -алгебра простору
-алгебра простору ![]() .
.
Для функції ![]() , (
, (![]() ) зовнішній інтеграл за мірою
) зовнішній інтеграл за мірою ![]() визначається як нижня грань інтегралів від всіх вимірних функцій
визначається як нижня грань інтегралів від всіх вимірних функцій ![]() (
(![]() ), що мажорують
), що мажорують ![]() , тобто
, тобто
![]() ,
, ![]() .
.
Тут ![]() – функція розподілу випадкової величини
– функція розподілу випадкової величини ![]() , що відповідає ймовірнісній мірі
, що відповідає ймовірнісній мірі ![]() .
.
Для довільної функції ![]() має місце співвідношення:
має місце співвідношення:
![]() ,
,
де ![]() ,
, ![]() , і вважають, що
, і вважають, що ![]() .
.
Оскільки зовнішній інтеграл визначений для будь-якої функції, як для вимірної, так і для невимірної, то ніяких додаткових обмежень на функції ![]() і
і ![]() накладати не треба.
накладати не треба.
Для вимірних функцій обидва види математичних сподівань співпадають. Отже, у постановках задач можна замінити звичайне математичне сподівання на зовнішнє, і навіть якщо знайдена при цьому функція ![]() виявиться вимірною, то отримана стратегія керування не перестане бути оптимальною.
виявиться вимірною, то отримана стратегія керування не перестане бути оптимальною.
Зовнішня міра множини ![]() визначається співвідношенням
визначається співвідношенням ![]() .
.
Для будь-якої множини ![]()
![]() ,
,
де ![]() – це індикатор множини
– це індикатор множини ![]() , що визначається як
, що визначається як 
а) якщо ![]() , то
, то ![]() ;
;
б) якщо ![]() і
і ![]() , то
, то ![]() ;
;
в) якщо ![]() або
або ![]() , то
, то ![]() ;
;
г) якщо ![]() задовольняє рівності
задовольняє рівності ![]() , то для будь-якої функції
, то для будь-якої функції ![]() має місце рівність
має місце рівність ![]() ;
;
д) якщо ![]() , то
, то ![]() для будь-якої функції
для будь-якої функції ![]() ;
;
е) якщо ![]() і
і ![]() , то
, то ![]() . Якщо при цьому хоча б одна з функцій
. Якщо при цьому хоча б одна з функцій ![]() або
або ![]()
![]() -вимірна, то останнє співвідношення вірно зі знаком рівності.
-вимірна, то останнє співвідношення вірно зі знаком рівності.
Позначимо через ![]() дійсну пряму, а через
дійсну пряму, а через ![]() – розширену дійсну пряму і надалі у всіх висновках замість дійсної прямої використовуватимемо поняття розширеної дійсної прямої.
– розширену дійсну пряму і надалі у всіх висновках замість дійсної прямої використовуватимемо поняття розширеної дійсної прямої.
Вважатимемо, що для розширеної дійсної прямої мають місце всі співвідношення порядку додавання і множення, які було введено для ![]() , і припустимо, що
, і припустимо, що ![]() і
і ![]() .
.
Позначимо через ![]() множину всіх дійсних у розширеному розумінні функцій
множину всіх дійсних у розширеному розумінні функцій ![]() , де
, де ![]() – простір станів.
– простір станів.
![]() – банахів простір всіх обмежених дійсних функцій
– банахів простір всіх обмежених дійсних функцій ![]() з нормою, що визначається за формулою
з нормою, що визначається за формулою
![]() ,
, ![]() .
.
Позначатимемо ![]() , якщо
, якщо ![]() ,
, ![]() ,
, ![]() і
і ![]() , якщо
, якщо ![]() ,
, ![]() ,
, ![]() .
.
Для будь-якої функції ![]() і будь-якого числа
і будь-якого числа ![]() позначимо через
позначимо через ![]() функцію, що приймає значення
функцію, що приймає значення ![]() в кожній точці
в кожній точці ![]() , так, що
, так, що
![]() ,
, ![]() .
.
Припущення монотонності. Для будь-яких станів ![]() , керування
, керування ![]() і функцій
і функцій ![]() мають місце нерівності
мають місце нерівності
![]() якщо
якщо ![]() і
і ![]() ;
;
![]() , якщо
, якщо ![]() і
і ![]() ;
;
![]() , якщо
, якщо ![]() ,
, ![]() і
і ![]() .
.
Для будь-якого ![]() стратегія
стратегія ![]() називається
називається ![]() -оптимальною при горизонті
-оптимальною при горизонті ![]() , якщо
, якщо
і ![]() -оптимальною, якщо
-оптимальною, якщо
Багато задач послідовної оптимізації, що становлять практичний інтерес, можуть розглядатися як окремі випадки задач загального виду. Розглянемо деякі з них:
· задачі детермінованого оптимального керування;
· задачі стохастичного керування зі зліченним простором збурень;
· задачі стохастичного керування із зовнішнім інтегралом;
· задачі стохастичного керування з мультиплікативним функціоналом витрат;
· задачі мінімаксного стохастичного керування.
2. Детерміноване оптимальне керування
Розглянемо відображення ![]() , що задане формулою
, що задане формулою
![]() ,
, ![]() ,
, ![]() ,
, ![]() (1)
(1)
за таких припущень:
функції ![]() і
і ![]() відображають множину
відображають множину ![]() відповідно в множини
відповідно в множини ![]() і
і ![]() , тобто
, тобто ![]() ,
, ![]() ; скаляр
; скаляр ![]() додатний.
додатний.
За цих умов відображення ![]() задовольняє припущенню монотонності. Якщо функція
задовольняє припущенню монотонності. Якщо функція ![]() дорівнює нулю, тобто
дорівнює нулю, тобто ![]() ,
, ![]() , то відповідна
, то відповідна ![]() -крокова задача оптимізації (1) набуває вигляду:
-крокова задача оптимізації (1) набуває вигляду:
 , (2)
, (2)
![]() . (3)
. (3)
Ця задача є задачею детермінованого оптимального керування зі скінченним горизонтом. Задача з нескінченним горизонтом має наступний вигляд:
 , (4)
, (4)
![]() . (5)
. (5)
Границя в (4) існує, якщо має місце хоча б одна з наступних умов:
· ![]() ,
, ![]() ,
, ![]() ;
;
· ![]() ,
, ![]() ,
, ![]() ;
;
· ![]() ,
, ![]() ,
, ![]() ,
, ![]() і деякого
і деякого ![]() .
.
У задачі (4) – (5) може бути уведене додаткове обмеження на стан системи ![]() ,
, ![]() . У такому разі, якщо
. У такому разі, якщо ![]() , позначатимемо
, позначатимемо ![]() .
.
3. Оптимальне стохастичне керування: зліченний простір збурень
Розглянемо відображення ![]() , що задане формулою
, що задане формулою
![]() , (6)
, (6)
за таких припущень:
параметр ![]() приймає значення зі зліченної множини
приймає значення зі зліченної множини ![]() з заданим розподілом ймовірностей
з заданим розподілом ймовірностей ![]() , що залежать від
, що залежать від ![]() і
і ![]() ; функції
; функції ![]() і
і ![]() відображають множину
відображають множину ![]() відповідно в множини
відповідно в множини ![]() і
і ![]() , тобто
, тобто ![]() ,
, ![]() ; скаляр
; скаляр ![]() додатний.
додатний.
Якщо ![]() ,
, ![]() , – елементи множини
, – елементи множини ![]() ,
, ![]() – довільний розподіл ймовірностей на
– довільний розподіл ймовірностей на ![]() , а
, а ![]() – деяка функція, то математичне сподівання визначається за формулою
– деяка функція, то математичне сподівання визначається за формулою
 ,
,
де ![]() ,
,
![]() ,
,
![]() .
.
Оскільки ![]() , то математичне сподівання
, то математичне сподівання ![]() визначене для будь-якої функції
визначене для будь-якої функції ![]() і будь-якого розподілу ймовірностей
і будь-якого розподілу ймовірностей ![]() на множині
на множині ![]() .
.
Зокрема, якщо ![]() ,
, ![]() ,… – розподіл ймовірностей
,… – розподіл ймовірностей ![]() на множині
на множині ![]() , то формулу (6) можна переписати так:
, то формулу (6) можна переписати так:
При використанні цього співвідношення треба пам’ятати, що для двох функцій ![]() ,
, ![]() рівність
рівність ![]() має місце, якщо виконується хоча б одна з трьох умов:
має місце, якщо виконується хоча б одна з трьох умов:
![]() та
та ![]() ;
;
![]() та
та ![]() ;
;
![]() та
та ![]() .
.
Відображення ![]() задовольняє припущенню монотонності. Якщо функція
задовольняє припущенню монотонності. Якщо функція ![]() – тотожний нуль, тобто
– тотожний нуль, тобто ![]() ,
, ![]() , то за умови
, то за умови ![]() ,
, ![]() , функцію витрат за
, функцію витрат за ![]() кроків можна подати у вигляді:
кроків можна подати у вигляді:
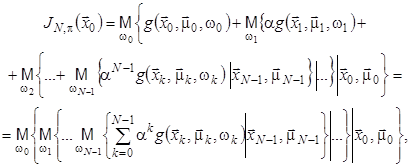 (7)
(7)
де ![]() ,
, ![]() .
.
Ця умова означає, що математичне сподівання обчислюється послідовно по всіх випадкових величинах ![]() .
.
При цьому зміна порядку операцій додавання і узяття математичного сподівання припустима, тому що ![]() ,
, ![]() , і для довільних простору з мірою
, і для довільних простору з мірою ![]() , вимірної функції
, вимірної функції ![]() і числа
і числа ![]() має місце рівність
має місце рівність ![]() .
.
Якщо виконується одна з двох нерівностей
 або
або
 ,
,
то функцію витрат за ![]() кроків
кроків ![]() можна записати у вигляді:
можна записати у вигляді:
 ,
,
де математичне сподівання обчислюється на добутку мір на ![]() , а стани
, а стани ![]() ,
, ![]() , виражаються через
, виражаються через ![]() за допомогою рівняння
за допомогою рівняння ![]() .
.
Якщо функція ![]() допускає подання у такому вигляді для будь-якого початкового стану
допускає подання у такому вигляді для будь-якого початкового стану ![]() та будь-якої стратегії
та будь-якої стратегії ![]() , то
, то ![]() -крокова задача може бути сформульована так:
-крокова задача може бути сформульована так:
 , (8)
, (8)
![]() . (9)
. (9)
Відповідна задача з нескінченним горизонтом формулюється так:
 , (10)
, (10)
![]() . (11)
. (11)
Границя в (10) існує при виконанні будь-якої з трьох наступних умов:
· ![]() ,
, ![]() ,
, ![]() ,
, ![]() ;
;
· ![]() ,
, ![]() ,
, ![]() ,
, ![]() ;
;
· ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() і деякого
і деякого ![]() .
.
Математичне сподівання визначається і як звичайний інтеграл, і як зовнішній інтеграл з ![]() -алгеброю в множині
-алгеброю в множині ![]() , що складається із всіх підмножин
, що складається із всіх підмножин ![]() , в залежності від вимірності або невимірності функцій.
, в залежності від вимірності або невимірності функцій.
Для багатьох практичних задач виконується припущення про зліченність множини ![]() .
.
Якщо ж множина ![]() незліченна, то справа ускладнюється необхідністю обчислення математичного сподівання
незліченна, то справа ускладнюється необхідністю обчислення математичного сподівання
![]()
для будь-якої функції ![]() . Подолання цих труднощів і пов’язане з використанням зовнішнього інтеграла.
. Подолання цих труднощів і пов’язане з використанням зовнішнього інтеграла.
Похожие работы
-
Прохождение случайного процесса через типичное радиотехническое устройство
В данный момент Вы стали обладателем курсовой работы по статистической радиотехнике. Данная работа была сдана на отлично мною в Черкасском Государственном технологическом университете на кафедре радиотехники еще на 3 курсе, скажу честно предмет довольно мутноватый, и как по мне, неинтересный, но учиться надо, и делать эту курсовую пришлось, и так чтобы Вы не шли по моим стопам, изучая основы статистической радиотехники и не забивали себе мозги этой чушью, сдавайте этот курсовой и не думайте больше о нем.
-
Системи масового обслуговування з очікуванням без обмеження на довжину черги
Багатоканальні систем масового обслуговування з обмеженою чергою. Використання формули Смолуховського-Чепмена. Властивості стаціонарності і ординарності простіших (пуассонівських) потоків. Характеристики систем масового обслуговування з очікуванням.
-
Типові вхідні сигнали
Характеристика сутності типових вхідних сигналів, які використовуються для теоретичного й експериментального дослідження автоматичних систем. Східчаста, імпульсна, лінійно-зростаюча вхідна дія. Білий шум, імпульсна перехідна функція. Підсилювальна ланка.
-
Випадкові процеси та одновимірні закони розподілу ймовірностей
Випадкові процеси та одновимірні закони розподілу ймовірностей Характер прийнятих сигналів як носіїв інформації є випадковим і заздалегідь не є відомий, тому з цього погляду сигнали треба розглядати як випадкові функції часу. Крім того, передавання інформації завжди супроводжується дією різноманітних завад та шумів, тому реальні сигнали є сумішшю корисного сигналу та завади.
-
Постановка задачі оптимального стохастичного керування
1. Загальні положення Позначатимемо – простір станів, Можливі керування є множиною припустимих керувань , яка у свою чергу є підмножиною простору керувань
-
Задачі сигналів та критерії оптимальності рішень
Типи задач обробки сигналів: виявлення сигналу на фоні завад, розрізнення заданих сигналів. Показники якості вирішення задачі обробки сигналів. Критерії оптимальності рішень при перевірці гіпотез, оцінюванні параметрів та фільтруванні повідомлень.
-
Розрахунок слідкуючої системи
Диференційне рівняння розімкненої та замкненої систем, граничний коефіцієнт підсилення. Вибір коефіцієнта підсилення електронного підсилювача. Передавальні функції окремих елементів корегованої системи, її логарифмічно-частотні характеристики.
-
Постановка задачі оптимального керування
Теорія оптимального керування; об’єкт як система, що функціонує під впливом певного фактора, здатного регулювати її еволюцію. Крайові умови задачі оптимального детермінованого керування. Числові характеристики критеріїв якості. Задачі з дискретним часом.
-
Оптимальність у системах керування
1. Умови оптимальності у неавтономних системах керування У загальному випадку неавтономної системи права частина закону руху й підінтегральна функція цільового функціонала залежать явно від часу
-
Аналіз структурних властивостей зображень
Мета і методи аналізу й автоматичної обробки зображень. Сигнали, простори сигналів і системи. Гармонійне коливання, як приклад найпростішого періодичного сигналу. Імпульсний відгук і постановка задачі про згортку. Поняття одновимірного перетворення Фур'є.