Название: Исследование возможностей коррекции динамических свойств линейной системы газового привода
Вид работы: лабораторная работа
Рубрика: Коммуникации и связь
Размер файла: 189.15 Kb
Скачать файл: referat.me-168986.docx
Краткое описание работы: Влияние постоянной времени на динамические свойства системы привода. Рациональное определение параметров фильтра. Схема скорректированной системы привода. Характеристики скорректированной системы привода до и после уменьшения постоянных времени фильтра.
Исследование возможностей коррекции динамических свойств линейной системы газового привода
Федеральное агентство по образованию и науке РФ
Тульский государственный университет
Кафедра «Системы автоматического управления»
Отчёт по лабораторной работе № 2
по курсу
ПРОЕКТИРОВАНИЕ МЕХАТРОННЫХ СИСТЕМ
Исследование возможностей коррекции динамических свойств
линейной системы газового привода.
Тула 2008год
Цель и задачи исследования
Овладеть методикой выбора структуры и параметров корректирующих фильтров.
Для достижения поставленной цели требуется решение следующих задач:
1) исследовать влияние постоянной времени ![]() на динамические свойства системы привода;
на динамические свойства системы привода;
2) исследовать влияние разноса постоянных времени корректирующего фильтра  на динамические свойства системы привода;
на динамические свойства системы привода;
3) дать рекомендации по рациональному определению параметров фильтра.
Выполнение работы :
1) Математическая модель исследуемой системы привода в среде MATLAB представлена на рисунке 1
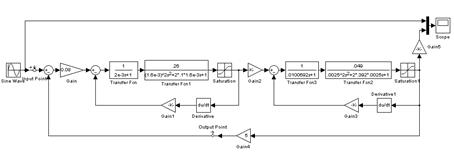
Рисунок 1. Математическая модель системы привода в среде MATLAB.
2) Экспериментально установить предельное значение коэффициента передачи электронного усилителя ![]() , соответствующее границе устойчивости системы привода, приняв
, соответствующее границе устойчивости системы привода, приняв ![]() .
.
Предельное значение коэффициента передачи электронного усилителя ![]()
Частотные характеристики системы привода с предельными значениями запасов устойчивости представлены на рисунке 2.
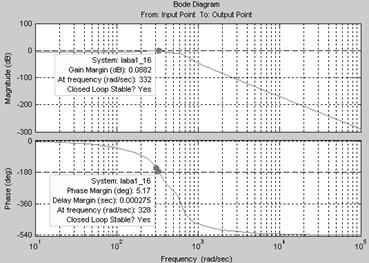
Рисунок 2. ЛАФЧХ системы привода на границе устойчивости.
3) Для простейшей структуры корректирующего фильтра найти его параметры: ![]() и
и ![]() из условия обеспечения запаса устойчивости
из условия обеспечения запаса устойчивости ![]() .
.
Математическая модель исследуемой системы привода с корректирующим фильтром в среде MATLAB представлена на рисунке 3.
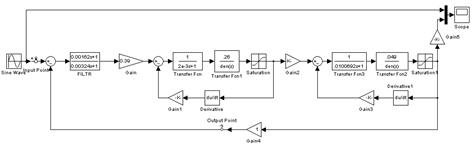
Рисунок 3. Математическая модель системы привода с корректирующим фильтром в среде MATLAB.
Следовательно, передаточная функция корректирующего фильтра имеет вид:
![]() , где
, где ![]() ,
, ![]() .
.
Частотные характеристики скорректированной системы привода представлены на рисунке 4.
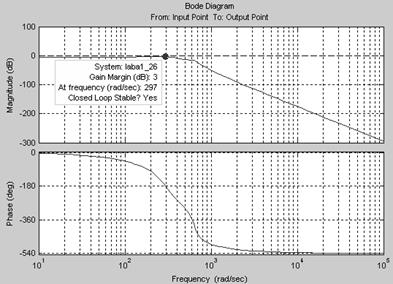
Рисунок 4. Частотные характеристики скорректированной системы привода.
4) Для скорректированной системы получить ЛАЧХ и ЛФЧХ замкнутого и разомкнутого контура системы привода, определить запасы устойчивости по амплитуде ![]() и фазе
и фазе ![]() .
.
Структурная схема скорректированной системы привода представлена на рисунке
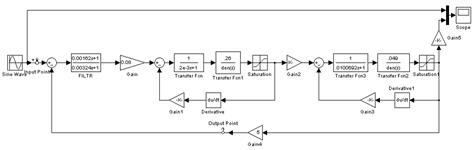
Рисунок 5. Структурная схема скорректированной системы привода.
Частотные характеристики скорректированной системы привода представлены на рисунке 6.
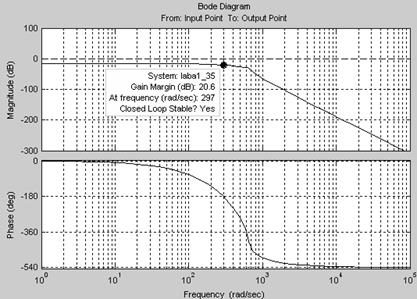
Рисунок 6. Частотные характеристики скорректированной системы привода.
Запасы устойчивости: по амплитуде ![]() .
.
5) Не изменяя ![]() , варьируя разносом постоянных времени
, варьируя разносом постоянных времени ![]() , исследовать его влияние на запасы устойчивости. Исследование проиллюстрировать семейством частотных характеристик.
, исследовать его влияние на запасы устойчивости. Исследование проиллюстрировать семейством частотных характеристик.
а) ![]() ,
, ![]()
![]()
Вид частотных характеристик системы привода при заданных параметрах корректирующего фильтра, т.е. при уменьшении разноса фильтра, представлен на рисунке 7.
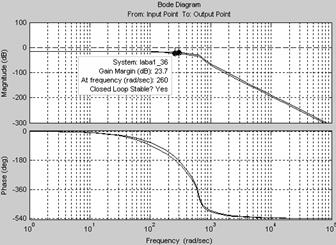
Рисунок 7. Частотные характеристики скорректированной системы привода при уменьшении разноса фильтра.
Из анализа рисунка 7 видно, что при уменьшении разноса фильтра запасы устойчивости в системе привода возрастают. Запасы устойчивости: по амплитуде ![]() .
.
б) ![]() ,
, ![]()
![]()
При увеличении разноса постоянных времени по сравнению с исходным запасы устойчивости в системе уменьшаются. Из анализа рисунка 8 видно, что при данном разносе фильтра запас устойчивости по амплитуде ![]() .
.
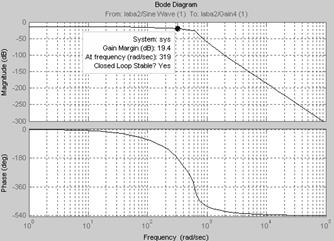
Рисунок 8. Частотные характеристики скорректированной системы привода при увеличении разноса фильтра.
6) Зафиксировав разнос постоянных времени ![]() , варьируя значением
, варьируя значением ![]() , исследовать ее влияние на запасы устойчивости. Исследование проиллюстрировать семейством частотных характеристик.
, исследовать ее влияние на запасы устойчивости. Исследование проиллюстрировать семейством частотных характеристик.
Принимаем ![]() .
.
Исходные значения постоянных времени ![]() ,
, ![]()
а) ![]() ,
, ![]()
При увеличении значений постоянных времени при фиксированном разносе запасы устойчивости возрастают ![]() .
.
Исходные и изменённые частотные характеристики представлены на рисунке 9.
б) ![]() ,
, ![]()
При уменьшении значений постоянных времени при фиксированном разносе запасы устойчивости уменьшаются ![]() .
.
Исходные и изменённые частотные характеристики представлены на рисунке 10.
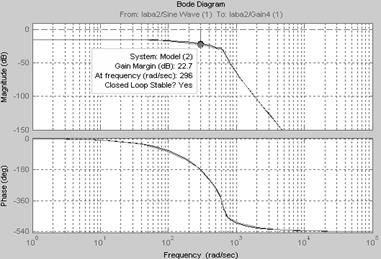
Рисунок 9. Частотные характеристики скорректированной системы привода до и после увеличения постоянных времени фильтра
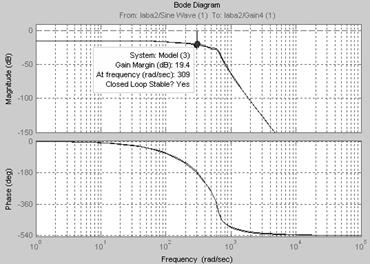
Рисунок 10. Частотные характеристики скорректированной системы привода до и после уменьшения постоянных времени фильтра
7) Экспериментально определить параметры четырехскобочного корректирующего фильтра и оценить его эффективность по сравнению с простейшей структурой
Передаточная функция четырехскобочного корректирующего фильтра имеет вид:
![]() , где
, где ![]()
Структурная схема скорректированной системы, собранная в MATLAB представлена на рисунке 11.
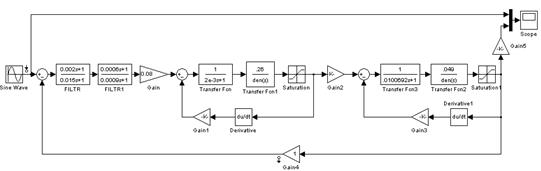
Рисунок 11. Структурная схема скорректированной системы привода c четырёхскобочным фильтром.
Частотные характеристики скорректированной системы привода представлены на рисунке 12.
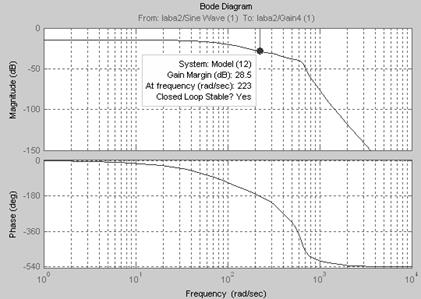
Рисунок 12. Частотные характеристики скорректированной системы привода до и после уменьшения постоянных времени фильтра
Передаточная функция фильтра имеет вид:
![]()
Запасы устойчивости в скорректированной таким образом системе ![]() .
.
Похожие работы
-
Устройство CD дисков
Типовой привод состоит из: платы электроники – размещены все управляющие схемы привода, интерфейс с контроллером компьютера, разъемы интерфейса и выхода звукового сигнала.
-
Синтез последовательного корректирующего устройства и оценка показателей качества переходных
УО «БГУИР» Кафедра: Конструирования ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовой работе дисциплине: Теория автоматического управления Тема: Синтез последовательного корректирующего устройства и оценка показателей качества переходных процессов
-
Исследование свойств многоканальных доплеровских фильтров
Исследование частотных свойств фильтра. Особенности уровня боковых лепестков, шумовых полос, максимальных потерь преобразования окна Кайзера-Бесселя при заданных параметрах. Исследование энергетических и вероятностных свойств многоканального фильтра.
-
Построение и расчет статических характеристик электропривода системы генератор-двигатель системы
Министерство образования и Науки Украины Тема проекта: «Построение и расчет статических характеристик электропривода системы генератор-двигатель системы Г-Д»
-
Повышение точности и устойчивости системы автоматического управления
Повышение точности системы путем увеличения порядка астатизма системы. Коррекция путем изменения коэффициента усиления системы. Коррекция с отставанием (применение интегрирующих звеньев) и опережением (применение дифференцирующих звеньев) по фазе.
-
Типовые компоновки роботизированных технологических комплексов (РТК) сборки
Процессу внедрения промышленных роботов (ПР) в производство. Типовые варианты компоновки сборочных роботизированных технологических комплексов (РТК). Сборочные промышленные роботы, взаимодействующие с упорядоченной средой. Определение кинематики робота.
-
Проектирование управляемого привода в электромеханических системах
Разработка электропривода для программного управления линейным перемещением механизма подъёма промышленного робота. Расчет нагрузок, действующих на привод. Проверка двигателя и редуктора на нагрев. Моделирование цифровой модели данного электропривода.
-
Теория автоматического управления
Анализ устойчивости замкнутой системы по корням характеристического уравнения, алгебраическому и частотному критерию. Построение области устойчивости в плоскости параметра Кр. Методы коррекции исследуемой системы. Построение и анализ ЛЧХ системы.
-
Автоматизированный электропривод
Исследование линейной системы автоматического управления: определение передаточной функции, построение частотных характеристик, произведение проверки на устойчивость по критерию Гурвица, моделирование переходных процессов, расчет параметров качества.
-
Проектирование запоминающего модуля на сменном оптическом носителе
Конструирование сменного оптического носителя для запоминающего модуля: разработка электродвигателя вращения, привода каретки и оптической головки. Расчет показателей линейного двигателя позиционирования, информационной емкости и плотности записи.