Название: Частотне регулювання потужності насоса
Вид работы: лабораторная работа
Рубрика: Промышленность и производство
Размер файла: 198.09 Kb
Скачать файл: referat.me-300351.docx
Краткое описание работы: Монтаж автоматичної системи регулювання рівня води в резервуарі двопозиційним регулятором із зоною нечутливості. Визначення необхідної відстані для встановлення контактних електродів. Процес двопозиційного регулювання об’єкта з передаточною функцією.
Частотне регулювання потужності насоса
Міністерство освіти і науки України
Національний університет водного господарства і природокористування
Кафедра електротехніки і автоматики
Розрахунково-графічна робота
з дисципліни
«Монтаж,налагодження та експлуатація систем автоматизації»
Варіант 9
Виконав:
студент 5 курсу
групи АУТП-51
Пастушенко А.В.
Перевірив:
Кованько О.В.
Рівне – 2010
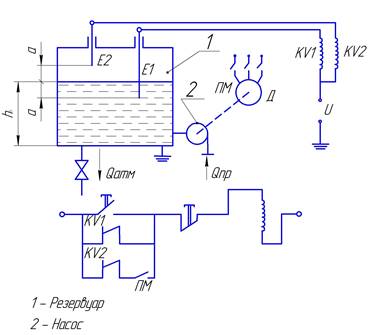
Рис1. Автоматична система регулювання рівня двопозиційним регулятором із зоною нечутливості
Дана АСР забезпечує підтримку заданого рівня води в резервуарі, запізнення в системі відсутнє. Із резервуара вода подається до споживача за допомогою насоса. Витрата Qот незалежить від рівня води в резервуарі. Заданий рівень води hзд =9м. Відцентровий насос, який подає воду в резервуар забезпечує витрату Qзд.пр =Qзд.от . Ця рівність справедлива при числі обертів nзд = 0,5nном . Коефіцієнт передачі об’єкта Kоб =9∙10-3 с-1 . Допустиме число вмикань двигуна m=19 вм/год.
Задача 1
Визначити на якій відстані відносно заданого hзд необхідно встановити контактні електроди.
Розв’язок
Так як по умовам задачі витрата нагнітаючого і відсмоктуючого насоса практично не залежить від рівня води в резервуарі, то об’єкт регулювання в динамічному відношенні може бути предствлений інтегруючою ланкою
![]()
У зв’язку з тим, що витрата насосів пропорційна числу обертів регулююча дія регулятора в приростах від заданого значення рівня В1 =К(nном -nзд );
В1 =К(2nзд -nзд )=Кnзд =В2 =В, де
К- коефіцієнт пропорційності
У відносних одиниціях регулююча дія записується так:
![]() ;
;
![]() =1=B1
=B2
=1=B1
=B2
Так як запізнення в системі рівне нулю, то при обмеженому числі вмикань двигуна, двопозиційний регулятор повинен мати статичну характеристику із зоною нечутливості, що не дорівнює нулю 2а≠0.
Таким чином параметри статичної характеристики регулятора:
B1 =B2 =B, a ≠ 0
Процес двопозиційного регулювання об’єкта з передаточною функцією
![]()
розраховується таким чином:
так як діапазон коливань
∆x=∆h=2a;
![]() , де n
– число перемикань.
, де n
– число перемикань.
n = 2m;
Тоді ![]() ;
;
Підставляючи значення величин знаходимо діапазон коливання рівня води в резервуарі у відносних одиницях
![]()
Діапазон коливань в абсолютних одиницях:
![]() м
м
Таким чином електроди в резервуарі повинні бути встановлені на відмітках:
![]() м
м
![]() м
м
Задача 2
На нашу систему надходить ступінчаста збурюча дія зі сторони відтоку,для компенсації якої в рівноважному стані необхідне збільшення числа обертів
nзд = 0.5nном
∆n = 0.9nном
Потрібно визначити частоту включень електродвигуна та час його включеного і виключеного стану за один період і тривалість включення ПВ(%).
Розв’язок
Визначаємо регулюючу дію В1 на об’єкт при включеннях електродвигуна в приростах від умовного рівноважного стану у відносних одиницях
n1 =0.5nном +0.9nном =0.14nном
n 1 – число обертів електродвигуна при новому умовно-рівноважному стані
При вимкненні електродвигуна регулююча дія рівна
![]()
![]() пер/год
пер/год
Число ввімкнень електродвигуна ![]() вм/год
вм/год
![]() (хв.)
(хв.)
![]() (хв.)
(хв.)
![]()
Задача 3
Розглянемо АСР рівня води в резервуарі зображену на даному рисунку. Умови: вода подається до споживача самотоком.
hзд =9 (м);
h1 =5.175 (м);
h2 =12.825(м);
В рівноважному стані nзд =0,5nном .
Коефіцієнт передачі об’єкта Kоб =9∙10-3 .
Постійна часу Tоб =19 (хв).
Визначити період встановившихся коливань рівня води в резервуарі, так як в даному випадку витрата води в резервуарі залежить від рівня то в динамічному відношенні об’єкт регулювання являється аперіодичною ланкою першого порядку з передаточною функцією:
![]()
В1 =6.14;
В2 =1;
 (хв)
(хв)
 (хв)
(хв)
![]() (хв)
(хв)
Похожие работы
-
Гідравлічні трубопроводи
Основні формули для гідравлічного розрахунку напірних трубопроводів при турбулентному режимі руху. Методика та головні етапи проведення даного розрахунку, аналіз результатів. Порядок і відмінності гідравлічного розрахунку коротких трубопроводів.
-
Діагностика процесів лезової обробки
Процес лезової обробки та рівень його працездатності. Оцінка якості функціонування процесу. Місце і причини несправностей. Вихідні дані для прогнозування технологічного стану процесу, аналізу ступеня досконалості конструкції та технології виробництва.
-
Автоматична система управління гасильного апарату
Розробка структури та розрахунок системи управління гасильного апарату, яка дозволяє автоматично регулювати густину вапняного молока, з мінімальними похибками виміру; дозволяє спостерігати всі значення і параметри вимірюваного середовища. Аналіз збурень.
-
Визначення параметрів електропривода верстата з ЧПК з підпорядкованим регулюванням координат
Автоматизація процесів управління електричними машинами. Визначення параметрів електропривода верстата з ЧПК: розрахунок потужності і вибір двигунів при контурно-позиційному керуванні. Інформаційні електромеханічні елементи виконавчих систем верстата.
-
Регулювання тиску пара в казані
Будова та принцип роботи казана, представлення його структурної та функціональної схем. Визначення закону регулювання та передатної функції тиску пару у пристрої. Аналіз стійкості системи автоматичного регулювання згідно критеріям Гурвіца та Найквиста.
-
Автоматизація процесу виготовлення бетонних сумішей
Автоматизація роботи підприємств по виготовленню бетонних ростворів, автоматичне управління технологічним процесом. Теоретичні основи технологічного процесу в окремих технологічних апаратах і машинах. Розроблення системи автоматичного керування.
-
Автоматизування змішувальної установки на основі одноконтурних систем регулювання
Побудова математичних моделей об'єктів керування. Вибір пристроїв незмінної та змінної частин. Вирішення задачі аналізу чи синтезу. Принцип роботи змішувальної установки основі одноконтурних систем регулювання. Синтез автоматичної системи регулювання.
-
Розробка одноконтурної автоматичної системи регулювання (АСР)
Проблеми забезпечення необхідних властивостей лінійних автоматичних систем. Застосовування спеціальних пристроїв, для корегування динамічних властивостей системи таким чином, щоб забезпечувалася необхідна якість її функціонування. Методи їх підключення.
-
Аналіз типової системи автоматичного регулювання температури в печі
Принцип дії системи автоматичного регулювання температури в печі, її поведінка при зміні задаючої і збурюючої величин. Структурна схема, передаточні функції, динаміка та статика. Моделювання перехідних процесів за допомогою комп’ютерної програми SIAM.
-
Керування точністю обробки
Керування точністю процесу обробки заготовок за вихідними даними. Керування пружними переміщеннями елементів технологічної системи для усунення систематичних та змінних систематичних похибок, які викликають похибки геометричної форми заготовок.