Название: Определение абсолютной скорости и ускорения точки в механизме
Вид работы: контрольная работа
Рубрика: Промышленность и производство
Размер файла: 292.6 Kb
Скачать файл: referat.me-302248.docx
Краткое описание работы: Задача Для заданной механической системы определить ускорения грузов и натяжения в ветвях нитей, к которым прикреплены грузы. Массами нитей пренебречь. Трение качения и силы сопротивления в подшипниках не учитывать. Система движется из состояния покоя.
Определение абсолютной скорости и ускорения точки в механизме
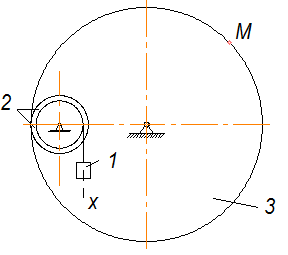
Задача 1
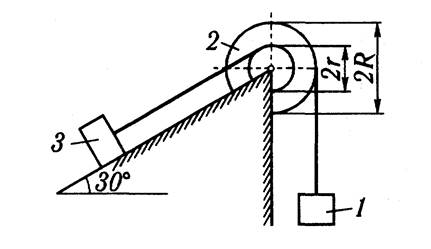
Для заданной механической системы определить ускорения грузов и натяжения в ветвях нитей, к которым прикреплены грузы. Массами нитей пренебречь. Трение качения и силы сопротивления в подшипниках не учитывать. Система движется из состояния покоя.
Данные:
1. G1 =2G, сила тяжести
2. G2 =G, сила тяжести
3. G3 =2G, сила тяжести
4. R/r=3
5. i2 x =2r, радиус инерции
6. f =0.2, коэффициент трения скольжения
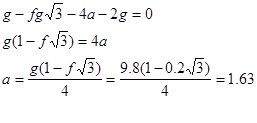
Решение
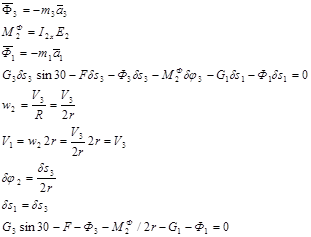
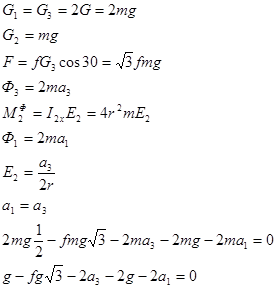
т.к. a1 =a3 тозаменим a1 =a3 =a
T3-2
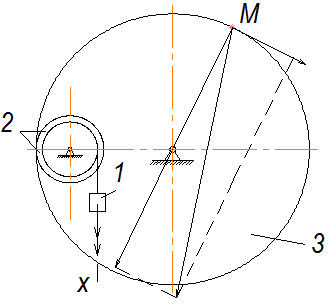
Задание K 2
Движение груза 1 должно описываться уравнением ![]() , где t-время (с),
, где t-время (с), ![]() -некоторые постоянные. В начальный момент времени (t=0) положение груза определяется координатой
-некоторые постоянные. В начальный момент времени (t=0) положение груза определяется координатой ![]() , и он имеет скорость
, и он имеет скорость ![]() . Учесть, что в момент времени t=t2
координата груза равна
. Учесть, что в момент времени t=t2
координата груза равна![]() . Определить коэффициенты
. Определить коэффициенты ![]() , при которых осуществляется требуемое движение груза 1. Определить также в момент времени t=t1,
скорость и ускорение груза и точки М одного из колес механизма.
, при которых осуществляется требуемое движение груза 1. Определить также в момент времени t=t1,
скорость и ускорение груза и точки М одного из колес механизма.
Данные:
7. R2 =45,cм
8. r2 =35, см
9. R3 =105, см
10. x0 =8, см
11. V0 =5, см/с
12. x2 =124, см
13. t2 =4, см
14. t1 =3, см
Решение
Нахождение коэффициентов ![]()
![]() ;
; ![]() ;
; ![]() ;
;
Скорость груза 1:
![]()
![]() ,
, ![]() ,
, ![]()
Уравнение движения груза 1:
![]()
Скорость груза 1:
![]() ;
;![]()
Ускорение груза 1:
![]()

![]()
![]()
![]()
![]()
![]() ;
; ![]()
![]()
![]()
![]()
Результаты вычислений для заданного момента времени t=t1
| V, см/с | а, см/с2 | Е3 , рад/с2 | VM , см/с | ||||
| 41 | 12 | 0,48 | 0,14 | 50,4 | 24,2 | 14,7 | 28,3 |
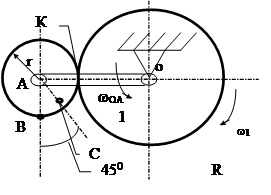
Вариант 6
Постановка задачи: Найти для заданного положения механизма скорости точек В и С, а также угловую скорость и угловое ускорение звена к которому эти точки принадлежат.
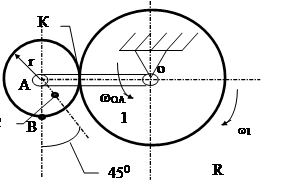
Дано: r = 15 cм, OA=40 см, AC=6 см, wOA =1 рад/с, w1 =1 рад/с, eOA =0 рад/с2 .
Найдем скорость точек С и В приняв за полюс точку А
Тогда скорости точек В и С запишутся как соответствующие суммы скоростей:
скорость полюса А во вращательном движении относительно точки о и скорость точки во вращательном движении относительно полюса А
Uc =Ue +Ur где Ue=wOA *OA; Ur=w2 *AC; Ur =1*40=40 cм/c
Ub =Ue +Ur где Ue=wOA *OA; Ur=w2 *AB
Найдем угловую скорость w2
w2 =UA /ACU
 где UK
= w1
*OK ; ОК=ОА-rOK=40-15=25; UK
=1*25=25 cм/c;
где UK
= w1
*OK ; ОК=ОА-rOK=40-15=25; UK
=1*25=25 cм/c;
КСU =r-ACU ; UА = wОА *ОА =1*40=40; => 40ACU =25*15-25ACU =5.769 см
w2 =40/5.769=6.933
получаем скорости точек С и В:
UC
r
=6.933*6=41.59cм/c
UCa
= =194.978см/с
=194.978см/с
UBr =6.933*15=103.995 cм/c
UBa
=![]() cм/c
cм/c
Найдем ускорения точек С и В
аа =аA +an +at
аA =wоа 2 *OA=40см/с2 ; ткeOA =0 то at =0;
для точки С an =w2 2 *AC=48.066*6=288.39 см/с2 ;
аа
C
= =331.71
=331.71
для точки Ban =w2 2 *AВ=48.066*15=720.099 см/с2 ;
аа
B
=![]() см/с2
см/с2
Вариант № 7
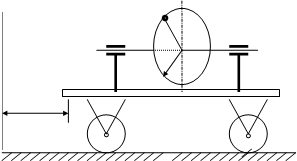
Точка М движется относительно тела D Определить абсолютную скорость и абсолютное ускорение точки М.
Дано: хе =хе (t)=3t+0.27t3 (см), t1 =10/3 (см), R=15 (см), jr =0.15pt3 .
Решение
Примем за центр отсчета точку О- центр вала К тогда скорость центра в движении вдоль оси Х определится как Uе = хе `(t)=3+0.81t2 , а угловая скорость точки М во вращательном движении вокруг центра О определится как w=jr `=0.45pt2 . Тогда относительная скорость точки М определится как Ur =0.45pt2 *R.
Абсолютная скорость точки в момент времени t=10/3 =>
Ua
=![]() =
=![]() ==235.924 (см/c).
==235.924 (см/c).
Найдем абсолютное ускорение точки М.
aa = ae +ar +acor
Переносное ускорение точки М:
аe = Ue `=1.62t.
Относительное ускорение
ar
=![]() где аt
=Ur
`=0.9pt*R, an
=w2
*R.
где аt
=Ur
`=0.9pt*R, an
=w2
*R.
ar
=![]()
Кореалисово ускорение acor =2wе Ur =0. т.к. wе =const.
Т. к. ar перпендикулярно ае то
aa
=ar
+ ае
=![]()
aa (t=10/3)=381.37
Исходные данные приведены в таблице:
| m1 | m2 | m3 | R3 ,см | α | β | f | δ | S,м | |
| m | 3m | m | 28 | 30º | 45º | 0,10 | 0,2 | 1,5 | ? |
Применим к решению задачи теорему об изменении кинетической энергии механической системы:
![]()
![]() , где
, где ![]() , т.к. в начале
, т.к. в начале
система покоилась.
![]() - сумма работ внутренних сил (нерастяжимых нитей абсолютно твердых тел).
- сумма работ внутренних сил (нерастяжимых нитей абсолютно твердых тел).
Следовательно, уравнение (1) принимает вид
![]()
![]()
Вычислим кинетическую энергию системы:
![]()
![]()
Тело 1 движется поступательно
Тело 2 вращается вокруг оси Z
 ;
; 
Тело 3 совершает плоскопараллельное движение, P-мгновенный центр скоростей
 ; где
; где ![]() ;
;
 ;
; 
Подставим ![]() в
в ![]() уравнение:
уравнение:

![]()
![]()
Найдем работу всех внешних сил при перемещении груза 1 на S1
![]()
![]()
![]()
![]()
![]() ,
,
где  ,
, ![]()
![]() и
и ![]() , т.к.
, т.к. ![]() и
и ![]()
![]()
![]() , т.к. центр масс неподвижен
, т.к. центр масс неподвижен
![]()
![]()
![]()
Подставим ![]() и
и ![]() во
во ![]() уравнение:
уравнение:
ОТВЕТ: ![]()
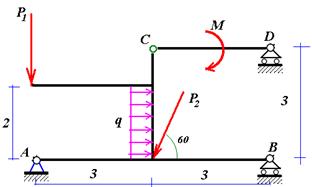
Рис. 1. Условие
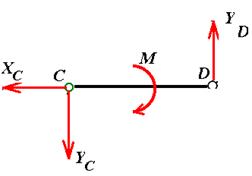
Рис. 2. Составим уравнения равновесия части CD
Xk = Xc = 0
Yk = Yc + YD = 0
Mc = 3YD M = 0
Составим уравнения равновесия части ACB
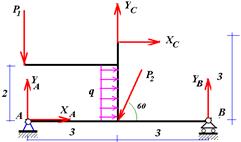
Рис. 3
Xk = XA + Xc P2 cos60 +2q=0
Yk = YA + YB + Yc P2 sin60 P1 = 0
MA = 2q·1 + 6YB 3P2 sin60 +3Yc 3Xc =0
Решаем систему уравнений и получаем (в кН) Xc =0, Yc =6.66, Xa =0.5, Ya =10.03, Yb =0.364, Yd =6.667.
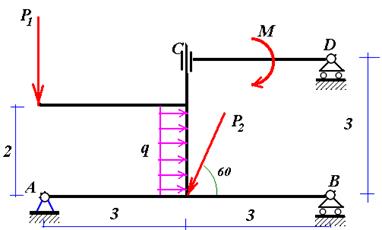
Рис. 4. Анализируя реакцию YB , заменим шарнир на скользящую заделку. Из уравнения проекций на ось y для части CD получим Yd =0.
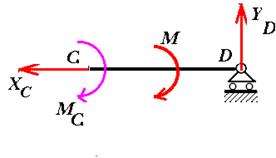
Рис. 5. Запишем сумму моментов для всей системы в целом относительно опоры A (Рис.
6)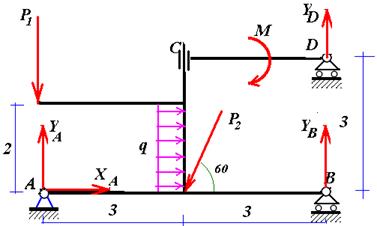
Рис. 6
MA = 2q·1 + 6YB 3P2 sin60 M=0
Вычислим Yb =7.031кН.
Вывод: для первого способа соединения исследуемая реакция меньше.
Похожие работы
-
Производство тканей
Если рассмотреть поверхность ткани с лицевой стороны в лупу, то видно, как отдельные нити, идущие вдоль куска - основы - переплетаются с нитями поперечного направления - утком. Нити основы идут параллельно друг другу вдоль всего куска ткани.
-
Исследование колебаний механической системы с одной степенью свободы
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ ТУЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ Кафедра теоретической механики КУРСОВАЯ РАБОТА
-
Расчёт механизмов инерционного конвейера
Особенности расчета принципа работы инерционного конвейера: построение планов скоростей, ускорений, силовой анализ механизма станка. Изучение принципа зацепления зубчатых колес, а также способа их изготовления. Геометрический синтез зубчатой передачи.
-
Методы обеспечения требуемого качества поверхностного слоя деталей машин
Одной из важных задач при обеспечении качества машины является повышение эксплуатационных показателей их деталей. Эти показатели определяются параметрами качества поверхностного слоя.
-
Проектирование механизма поворота автоматизированных станков
едеральное агентство по образованию анкт - Петербургский государственный политехнический университет Механико-машиностроительный факультет Кафедра: ГАК
-
Задачи по Теоретической менханике
Вариант №10 Задание №1 Определить реакции опор горизонтальной балки от заданной нагрузки Дано: Решение: Рассмотрим равновесие балки (рис. 1). К балке приложена уравновешенная система сил, состоящая из активных сил и сил реакции.
-
Расчет тягового усилия и мощности привода конвейера
Скорость движения тягового органа конвейера. Выбор тележки и тягового элемента. Определение погонной нагрузки. Тяговый расчет конвейера по контуру. Расчет тягового усилия и мощности привода. Проверка прочности тягового органа и расчет механизма натяжения.
-
Структурный и кинематический анализ рычажного механизма
Кинематическая схема шарнирного механизма. Определение длины кулисы и масштабного коэффициента длины. Построение плана положения механизма для заданного положения кривошипа методом засечек. Построение плана скоростей. Расчет углового ускорения кулисы.
-
Свойства полиспастов
Назначение, принцип работы, основные конструктивные разновидности и составляющие элементы полиспастов. Основные расчетные зависимости. Сопротивление за счет жесткости в канатах при огибании блоков. Опоры скользящего трения. Учет вредных сопротивлений.
-
Динамическое поведение механической системы с упругими связями
Исследование и анализ динамического поведения механической системы с упругими связями с помощью основных теорем и принципов теоретической механики. Составление дифференциального уравнения движения механической системы и определение реакций движения.