Название: Разработка регулируемого электропривода механизма с заданным рабочим циклом
Вид работы: курсовая работа
Рубрика: Промышленность и производство
Размер файла: 755.49 Kb
Скачать файл: referat.me-304178.docx
Краткое описание работы: Исходные данные сеть тип исполнительного органа – привод подачи станка; масса – параметры рабочего цикла, отнесенные к рабочему органу: Введение Среди большого разнообразия производственных электрифицированных агрегатов механизмы циклического действия относятся к числу основных в современных системах автоматического управления технологическими процессами.
Разработка регулируемого электропривода механизма с заданным рабочим циклом
Разработка регулируемого электропривода механизма с заданным рабочим циклом
Исходные данные
- сеть ![]() ,
, ![]() ;
;
- тип исполнительного органа – привод подачи станка;
- масса – ![]() ;
;
- параметры рабочего цикла, отнесенные к рабочему органу:
Введение
Среди большого разнообразия производственных электрифицированных агрегатов механизмы циклического действия относятся к числу основных в современных системах автоматического управления технологическими процессами. Отличительной особенность названных механизмов является режим работы, состоящий из ряда повторяющихся циклов. Каждый рабочий цикл включает, кроме участков установившейся работы или паузы, участки пуска, торможения и реверса. К этой группе относятся также и позиционные механизмы, рабочий орган которых должен в определённые моменты времени занимать строго определённые положения.
Требования к электроприводу названных механизмов продиктованы напряжённым пуско-тормозным режимом работы с большим числом включений в час, необходимостью регулирования скорости в широком диапазоне, надёжностью и экономичностью. В большой степени это относится к металлургическому производству, так как обработка металла связана с выполнением многочисленных циклических операций. Эти механизмы часто играют первостепенную роль в повышении производительности труда и эффективности производства, что подтверждает большую значимость рассматриваемых систем электропривода. Кроме того, общая мощность двигателей механизмов циклического действия составляет значительную часть мощности всех установленных двигателей.
1. Выбор рациональной схемы электропривода с учетом дополнительных требований
Автоматизированные электроприводы, и в особенности электроприводы с полупроводниковыми преобразователями, получают в последние годы всё большее практическое применение. Технические средства, используемые при создании автоматизированных электроприводов с полупроводниковыми преобразователями, непрерывно совершенствуются, а технико-экономические требования к таким электроприводам, всё более повышаются. Одним из наиболее перспективных направлений в создании высококачественных и надёжных автоматизированных электроприводов явилось в последние годы широкое применение в них микропроцессоров, микро-ЭВМ, элементов и устройств цифровой техники.
Указанному перспективному направлению в развитии автоматизированного электропривода в значительной мере отвечают цифровые электроприводы с силовыми транзисторными ключами (например, на IGBT-транзисторах). Как известно, подобные электроприводы отличаются весьма существенными достоинствами, в частности высокими энергетическими показателями – КПД и коэффициентом мощности, малыми габаритами и массой, стабильностью характеристик и их слабой зависимость от параметров силовых транзисторов, работающих в ключевом режиме, высоким быстродействием, возможность оптимизации параметров электроприводов с помощью микропроцессоров и микро-ЭВМ.
Выбор системы электропривода возможен на основе сравнительного анализа технических данных, приведенных в табл. 1 , и исходных данных на проектирование электропривода с учетом изложенных выше особенностей применения наиболее распространенных систем электропривода постоянного тока.
Таблица 1. Технические показатели систем электропривода
Наименование показателей |
||||||
Источник питания |
~ | ~/= | ~/= | ~ | ~ | ~ |
| Регулирование скорости |
|
|
||||
Диапазон мощностей |
|
|
* – в зоне частотного регулирования 5…20 Гц,
** – для «вентиляторной» нагрузки.
Диапазон регулирования скорости:
| (1) |
Необходимая средняя полезная мощность двигателя:
 |
(2) |
Исходя из этих условий выбираем систему ![]() . Основные технико-экономические свойства этой системы приведены в табл. 2.
. Основные технико-экономические свойства этой системы приведены в табл. 2.
Таблица 2. Удельная стоимость электрооборудования, усл. ед./кВт
| Наименование | |||
2. Выбор типа и параметров передаточного устройства и приведение механических величин к валу электропривода
Передаточное устройство привода преобразует вращательное движение электродвигателя в поступательное движение исполнительного органа. В современных электроприводах существует тенденция упрощения передаточного устройства путем исключения промежуточных звеньев в виде редукторов или других механизмов. При этом заметно возрастает точность, быстродействие и надежность привода.
Для электропривода подачи станка выбираем передачу винт-гайка качения. Преимуществами передач винт-гайка качения является: 1) возможность полного устранения зазора в резьбе и создания натяга, обеспечивающего высокую осевую жесткость, 2) низкие потери на трение; к. п. д. этих передач достигает 0.95, 3) почти полная независимость силы трения от скорости и очень малое трение покоя, что обеспечивает равномерность движения.
Кинематическая схема электропривода приведена на рис. 1.
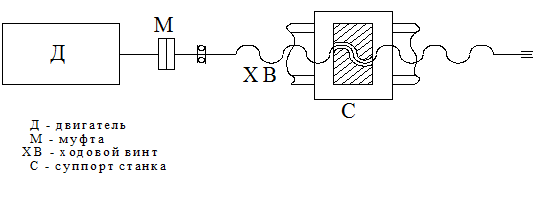
Рис. 1. Кинематическая схема электропривода
Основным параметром при расчёте передачи винт-гайка качения является рабочая часть ходового винта:
|
(3) |
По табл. 10
определяем параметры винта, при условии ![]() :
:
Шаг винта определяем из стандартного ряда, учитывая рекомендации:
Исходя из параметров винта по табл. 7 определяем параметры передачи винт-гайка качения с натягом:
К.П.Д. передачи по:
Радиус приведения к валу двигателя по:
| (4) |
Скорость вращения вала двигателя по:
| (5) | |
| (6) |
Приведение скорости рабочего органа к валу двигателя сведено в табл. 3 .
Таблица 3. Скорость рабочего органа и вала двигателя в момент ![]() -ого цикла
-ого цикла
Момент приведённый к валу двигателя по:
| (7) |
Статический момент на валу двигателя:
| (8) |
Момент трения складывается из:
| (9) |
Коэффициент трения в направляющих качения с танкетками примем по:
Сила трения в направляющих:
| (10) |
Момент сопротивления на валу двигателя от силы трения в направляющих:
| (11) |
Момент трения в шариковой паре при наличии предварительного натяга:
| (12) |
Количество подшипников ходового винта:
Внутренний диаметр подшипников табл. 12 [1, стр. 40];
Момент от сил трения в подшипниковой паре при наличии предварительного натяга [4, стр. 457];
| (13) |
Приведение статического момента к валу двигателя сведено в табл. 4 .
Таблица 4. Статический момент и сила резания в момент ![]() -ого цикла
-ого цикла
Момент инерции рабочего органа, приведенный к валу двигателя:
| (14) |
Момент инерции ходового винта, приведенный к валу двигателя:
| (15) |
3. Предварительный выбор электродвигателя
Выбор электродвигателя производится из условий эксплуатации, требований, предъявленных к системе. В приводах подач металлорежущих станков применяются высоко-моментные двигатели постоянного тока серий ДК, ПБВ, 2ПБВ, ДПУ, ДПМ, 2ДПМ, ДБМ, ДВМ, 2ДВМ.
Т.к. в данном электроприводе статический момент сопротивления на валу двигателя изменяется в достаточно широких пределах, произведем выбор двигателя по эквивалентному моменту:
 |
(16) |
По табл. 23.10 выбираем высоко-моментный двигатель ПБВ132М со следующими параметрами:
Номинальная частота вращения электродвигателя:
| (17) |
Номинальная мощность электродвигателя:
| (18) |
Постоянная машины:
| (19) |
Падение напряжения на щётках:
| (20) |
Суммарный момент инерции механизма:
| (21) |
Из условия ограничения ускорения при пуске значением в ![]() , имеем:
, имеем:
| (22) |
Из условия ограничения ускорения при торможении значением в ![]() , имеем:
, имеем:
| (23) |
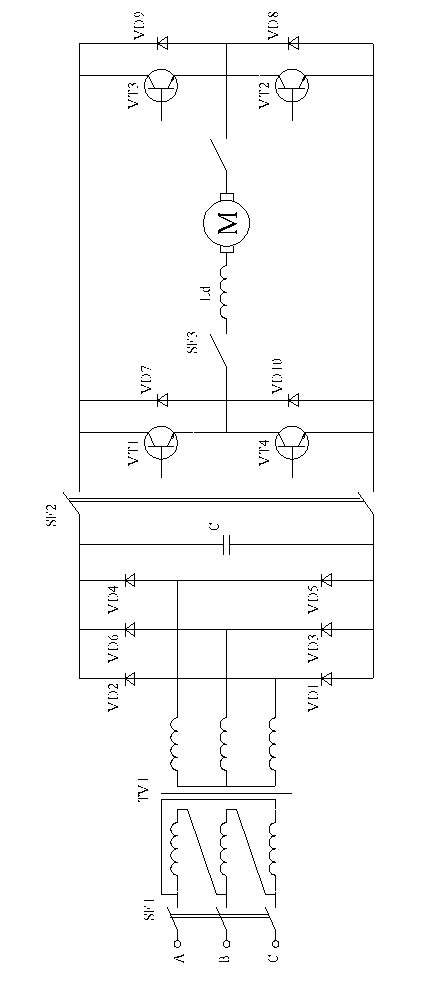
4. Выбор схемы главной электрической цепи привода, тип управляемого преобразователя, расчёт параметров элементов схемы
Схема системы ![]() с соединение питающего трансформатора
с соединение питающего трансформатора ![]() и мостовой схемой выпрямления приведена на рис. 2. Выберем симметричный режим работы преобразователя.
и мостовой схемой выпрямления приведена на рис. 2. Выберем симметричный режим работы преобразователя.
Выберем оптимальную серию трансформаторов ![]() :
:
Коэффициент ![]() трехфазной мостовой схемы по табл. 5.1.:
трехфазной мостовой схемы по табл. 5.1.:
Выпрямленное напряжение по:
| (24) |
Расчётная мощность трансформатора [6, стр. 194]:
| (25) |
Выбираем трансформатор ![]() с основными параметрами:
с основными параметрами:
Полное сопротивление фазы трансформатора, приведённое ко вторичной обмотке:
| (26) |
Активное сопротивление фазы трансформатора:
| (27) |
Индуктивное сопротивление фазы трансформатора:
| (28) |
Индуктивность фазы трансформатора [6, стр. 226]:
| (29) |
Имея коэффициенты ![]() ,
, ![]() и
и ![]() порассчитаем критическую индуктивность силовой цепи:
порассчитаем критическую индуктивность силовой цепи:
| (30) |
Индуктивность сглаживающего дросселя по:
| (31) |
Выберем реактор ![]() :
:
Выпрямительные диоды ![]() выберем с учётом перегрузочной способности двигателя –
выберем с учётом перегрузочной способности двигателя – ![]() :
:
В качестве обратных диодов ![]()
![]() - диоды, марки
- диоды, марки ![]() :
:
Сглаживающий конденсатор ![]() выберем марки
выберем марки ![]() по:
по:
В качестве транзисторных ключей ![]() используем
используем ![]() – транзисторы, марки
– транзисторы, марки ![]() :
:

 |
5. Расчёт и построение механических характеристик электропривода, соответствующих установившимся режимам рабочего цикла
Суммарное сопротивление якоря и реактора:
| (33) |
Жесткость механической характеристики:
| (34) |
Параметры рабочих режимов сведены в табл. 5
Таблица 5. Параметры рабочих режимов
Напряжение на выходе выпрямителя (пренебрегая нелинейностью вентилей):
| (35) |
Напряжение на выходе ![]() (пренебрегая нелинейностью
(пренебрегая нелинейностью ![]() – транзисторов) при
– транзисторов) при ![]() :
:
| (36) |
Напряжение на якоре двигателя:
| (37) |
Относительная длительность включения [8, стр. 77]:
 |
(38) |
Скорость холостого хода:
| (39) | |
| (40) |
Жесткость механической характеристики:
| (41) |
Результаты расчета механических характеристик сведены в табл. 6., статические механические характеристики приведены на рис. 3 и рис. 4.
Таблица 6. Статические механические характеристики
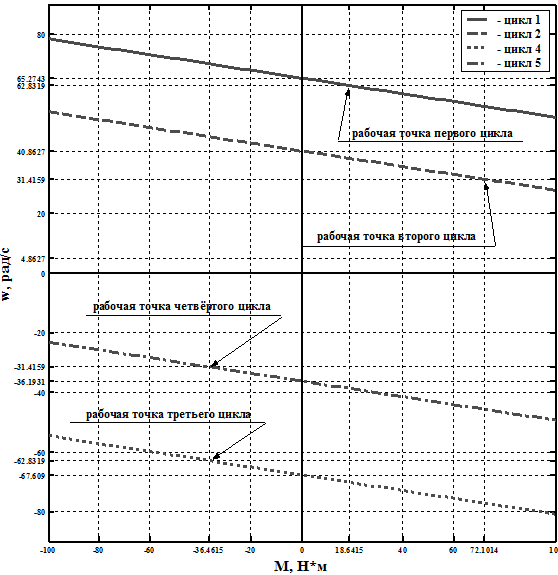
Рис. 3. Статические механические характеристики.
6. Выбор способа формирования и произведение расчета переходных процессов в электроприводе
Выберем линейный способ формирования задания на скорость с коэффициентом нарастания напряжения ![]() :
:
|
(42) |
| (43) |
Рассчитаем параметры переходных процессов в электроприводе.
Скорость в начале переходного процесса:
| (44) |
Скорость в конце переходного процесса:
| (45) |
Время переходного процесса:
| (46) |
Ускорение электропривода при протекании переходного процесса:
| (47) |
Динамический момент на валу электропривода:
| (48) |
Статическая ошибка по скорости:
| (49) |
Динамическая ошибка по скорости:
| (50) |
Расчёт переходных характеристик сведём в табл. 7., расчётные и экспериментальные кривые приведены на рис. 4–16
Таблица 7. Статические механические характеристики
Переходный процесс по циклу №1:
![]()
![]()
![]()
![]()
![]()
![]()
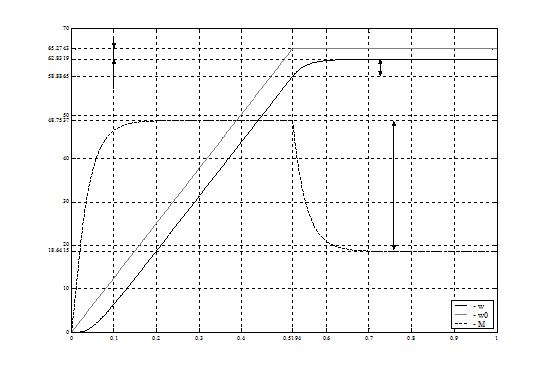
Рис. 4. Расчётная кривая переходного процесса
![]()
![]()
![]()
![]()
![]()
![]()
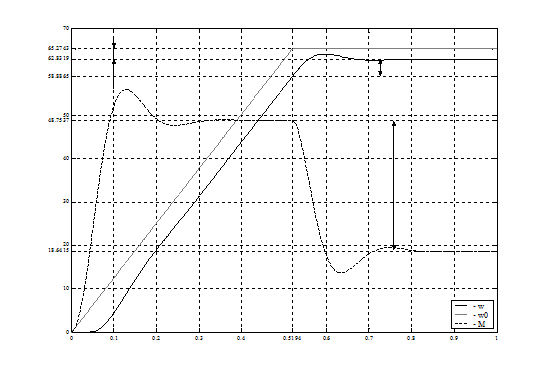
Рис. 5. Экспериментальная кривая переходного процесса
Переходный процесс по циклу №2
![]()
![]()
![]()
![]()
![]()
![]()
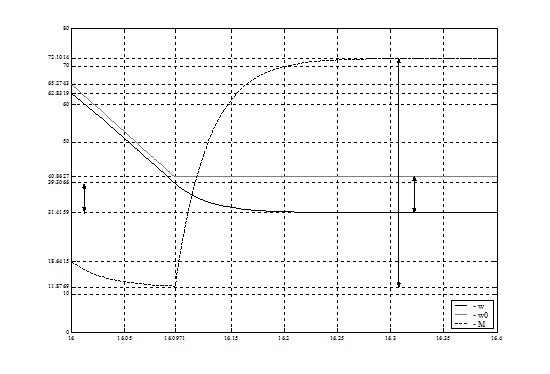
Рис. 6. Расчётная кривая переходного процесса
![]()
![]()
![]()
![]()
![]()
![]()
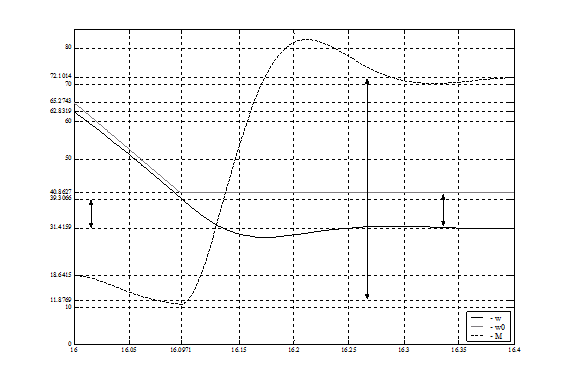
Рис. 7. Экспериментальная кривая переходного процесса
Переходный процесс по циклу №3
![]()
![]()
![]()
![]()
![]()
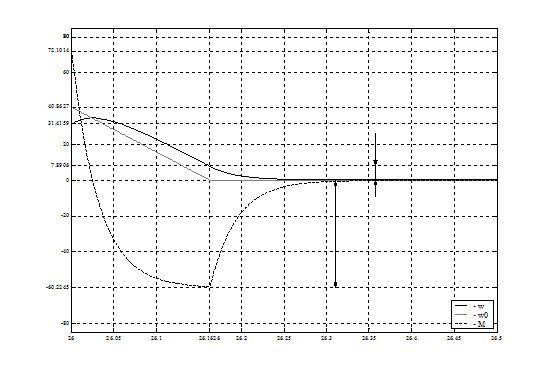
Рис. 8. Расчётная кривая переходного процесса
![]()
![]()
![]()
![]()
![]()
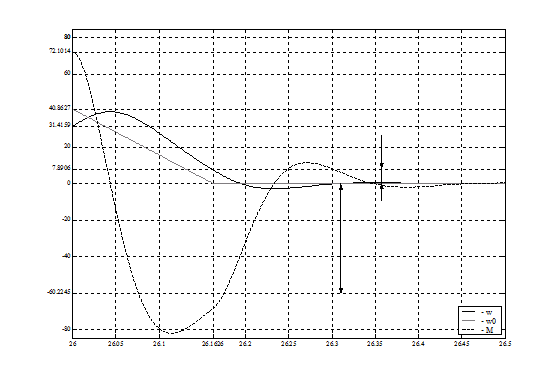
Рис. 9. Экспериментальная кривая переходного процесса
Переходный процесс по циклу №4
![]()
![]()
![]()
![]()
![]()
![]()
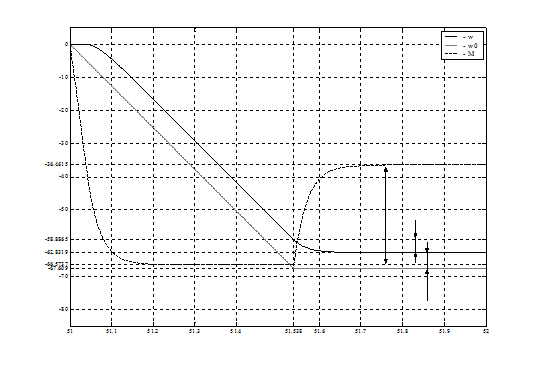
Рис. 10. Расчётная кривая переходного процесса
![]()
![]()
![]()
![]()
![]()
![]()
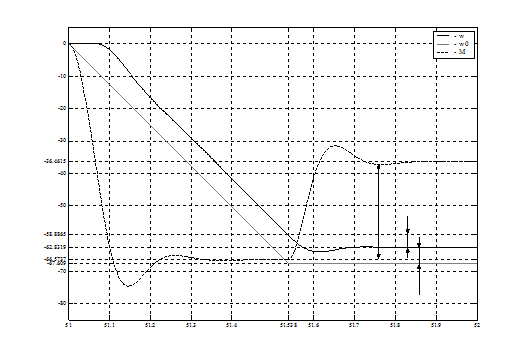
Рис. 11. Экспериментальная кривая переходного процесса
Переходный процесс по циклу №5
![]()
![]()
![]()
![]()
![]()
![]()
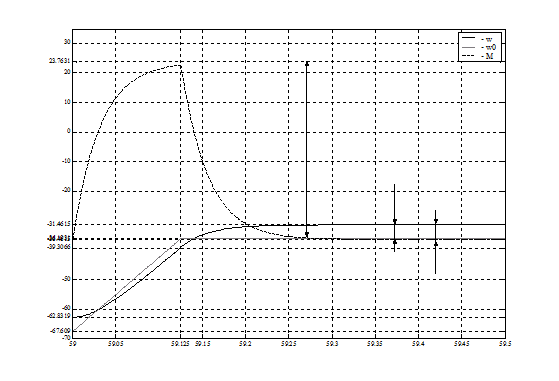
Рис. 12. Расчётная кривая переходного процесса
![]()
![]()
![]()
![]()
![]()
![]()
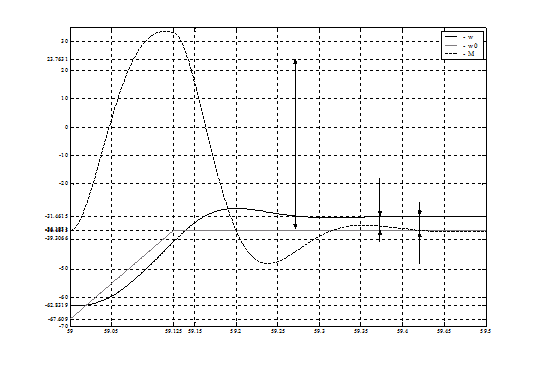
Рис. 13. Экспериментальная кривая переходного процесса
Переходный процесс по циклу №6
![]()
![]()
![]()
![]()
![]()
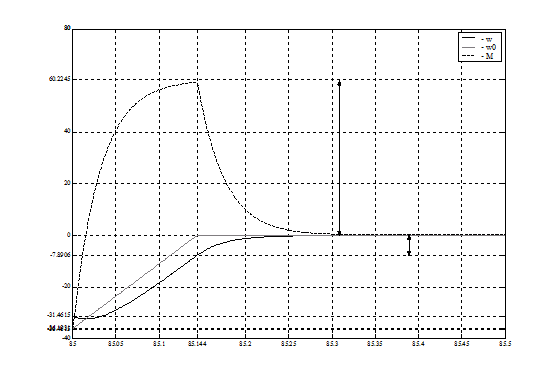
Рис. 14. Расчётная кривая переходного процесса
![]()
![]()
![]()
![]()
![]()
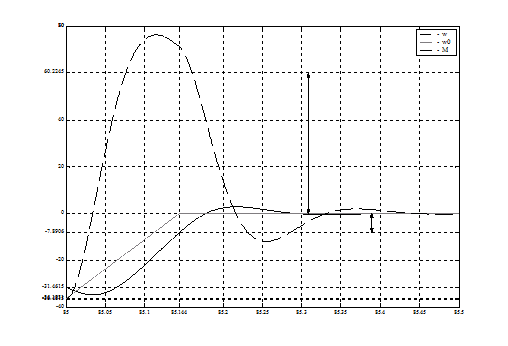
Рис. 15. Экспериментальная кривая переходного процесса
7. Произвести проверку выбранного двигателя по нагреву
Проверка выбранного двигателя по нагреву.
Для анализа правильности выбора мощности двигателя необходимо по кривым переходных процессов, полученным в п. 4 определить среднеквадратичный ток двигателя и сравнить его с длительным током.
 ,
,
где b – коэффициент, учитывающий охлаждение двигателя на разных скоростях вращения.
Зависимость b(w) имеет линейный характер (рис. 16).
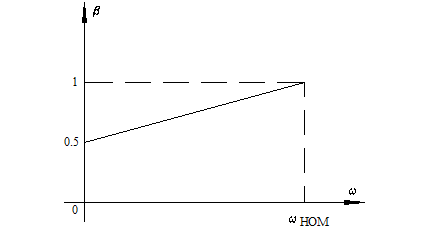
Рис. 16. Зависимость b(w)
С учетом этой зависимости и реального времени действия статических токов IЭКВ =40 А, что на 20% меньше номинального тока двигателя, равного IНОМ =50 А.
Дальнейшей оценкой правильности выбора двигателя служит оценка перегрева его частей.
Коэффициент теплоотдачи:

Среднеквадратичное отклонение потерь:
По графикам переходных процессов средние потери:
Тогда

Т.к. длительность цикла значительно меньше постоянной времени двигателя по нагреву (1.5 часа), то достаточно определить второе слагаемое неравенства для перегрева:

Как видно из расчетов температура двигателя за цикл работы остается практически неизменной. Следовательно, оценка правильности выбора двигателя по эквивалентному току является достаточной.
Список литературы
1. Елисеев В.А. Справочник по автоматизированному электроприводу, Москва, Энергоатомиздат, 1983.
2. Справочник по электрическим машинам под ред. Копылова И.П., Т.2. – М.: Энергоатомиздат, 1988.
3. Перельмутер В.М. Комплектные тиристорные электроприводы. – М.: Энергоатомиздат, 1988.
4. Чебовский О.Г. Силовые полупроводниковые приборы. – М.: Энергоатомиздат, 1975.
5. Справочник разработчика РЭА.
6. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. – Л.: Энергоатомиздат, 1982.
Похожие работы
-
Общие сведения о проходческих комбайнах со стреловидным исполнительным органом
Назначение проходческих комбайнов. Общая классификация ПК и их анализ. Общий состав узлов ПК со стреловидным исполнительным органом. Классификация ПК со стреловидным исполнительным органом.
-
Электропривод по схеме преобразователь частоты - асинхронный двигатель
Построение нагрузочной диаграммы исполнительного механизма. Выбор элементов силовой схемы. Расчет механических характеристик. Оценка необходимости применения обратной связи по скорости. Определение среднего КПД системы. Переходные процессы в приводе.
-
Автоматизированный электропривод
Расчёт статистических нагрузок и мощности ДПТ 6. Расчёт и построение электромеханических характеристик. Расчёт регулировочных сопротивлений. Расчёт переходных процессов при пуске и торможении электропривода.
-
Регулирующие запорно-регулирующие клапаны
Регулирующие (запорно-регулирующие) клапаны Клапаны предназначены для управления потоками жидких и газообразных сред, транспортируемых по трубопроводам.
-
Автоматизация типовых технологических процессов и установок
Типовая структура следящего электропривода; его реализация на вычислительных машинах. Принцип работы аналого-цифрового преобразователя с импульсным фотоэлектрическим датчиком. Составление таблицы состояний автоматизации работы грузового подъемника.
-
Автоматизация химической промышленности
Проблемы автоматизации химической промышленности. Возможности современных систем автоматизированного управления технологическими процессами предприятий химической промышленности. Главные особенности технологического оснащения химических предприятий.
-
Расчет скипового подъемника
Грузоподъемные машины для перемещения отдельных штучных грузов большой массы по произвольной пространственной трассе. Определение времени цикла и продолжительности включения двигателя. Кинематическая схема привода грузоподъемной тележки, расчет движения.
-
Изучение регулятора УРАН-1М
Автоматизация горных комбайнов и комплексов. Функциональная схема регулятора УРАН. Защита двигателя от "опрокидывания" (остановки). Стабилизация значения тока нагрузки путём автоматического изменения скорости подачи. Цепи дистанционного управления.
-
Разработка электропривода для лебедки-подъёмника
Введение Электропривод является неотъемлемой частью многих агрегатов и комплексов, используемых в различных отраслях народного хозяйства, науки и техники. Наряду с тенденцией автоматизации технологических и производственных процессов на базе вычислительной техники, современный электропривод стал наиболее распространённой разновидностью систем автоматического управления техническими объектами.
-
АСУ ТП 5-ти клетевого стана 630 холодной прокатки
Специфика управления на предприятиях черной металлургии с полным циклом производства. Функции и структура автоматизированных систем управления стана 630 холодной прокатки. Устройство и принципы работы локальной системы автоматического управления САРТиН.