Название: Проектирование электропривода подач металлорежущего станка
Вид работы: курсовая работа
Рубрика: Промышленность и производство
Размер файла: 441.31 Kb
Скачать файл: referat.me-304366.docx
Краткое описание работы: Федеральное агентство по образованию Северо-Западный государственный заочный Технический Университет Кафедра автоматизации производственных процессов
Проектирование электропривода подач металлорежущего станка
Федеральное агентство по образованию Северо-Западный государственный заочный Технический Университет Кафедра автоматизации производственных процессов
Курсовая работа по дисциплине
«Проектирование автоматизированных систем»
Тема «Проектирование электропривода подач металлорежущего станка»
Выполнил Кузьмичёв С. В.
Шифр 425011Л191
Руководитель: Абакулина Л. И.
Санкт-Петербург 2007г.
СОДЕРЖАНИЕ
1. ТЕХНИЧЕСКОЕ ЗАДАНИЕ. 2
2. ТЕХНИЧЕСКИЙ ПРОЕКТ. 3
2.1. РАССЧЁТ ПАРАМЕТРОВ ОСНОВНЫХ ЭЛЕМЕНТОВ.. 3
2.1.1. РАСЧЁТ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ.. 3
2.1.2. РАСЧЁТ ПАРАМЕТРОВ ТИРИСТОРНОГО ПРЕОБРАЗОВАТЕЛЯ МОЩНОСТИ.. 4
2.1.3. РАССЧЁТ ПАРМЕТРОВ ДАТЧИКОВ ОБРАТНОЙ СВЯЗИ.. 4
2.2. ВЫВОД ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЭЛЕМЕНТОВ ЭЛЕКТРОПРИВОДА 5
2.3. ПОСТРОЕНИЕ СТРУКТУРНОЙ СХЕМЫ.. 6
2.4. ОПРЕДЕЛЕНИЕ КАЧЕСТВЕННЫХ ПОКАЗАТЕЛЕЙ СИСТЕМЫ.. 9
2.5. СИНТЕЗ СИСТЕМЫ.. 16
ЗАКЛЮЧЕНИЕ. 18
ПРИЛОЖЕНИЕ. 19
ТЕХНИЧЕСКИЕ ДАННЫЕ ДВИГАТЕЛЯ СЛ-661. 19
ЛИТЕРАТУРА.. 19
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
Необходимо спроектировать электрический привод подач металлорежущего станка, о качественных показателях которого судят не по линейному перемещению объекта, а по характеру вращения выходного вала редуктора.
Исходные технические данные:
1. Двигатель типа СЛ-661 (смотри приложение).
2. Суммарный момент инерции, приведённый к валу двигателя J∑ =0,024кг∙м2 .
3. Коэффициент редукции i=40.
4. Статическая погрешность δС =±0,157рад.
5. Амплитуда скорости движения объекта по гармоническому (синусоидальному) закону ωm =360град/с.
6. Скоростная ошибка δv =5,319рад.
7. Время переходного процесса tп =6c.
8. Время первого согласования t1 =1,38c.
9. Величина верхнего перерегулирования σ=6,3%.
10. Величина нижнего перерегулирования σн =16,3%.
Система должна содержать отрицательные обратные связи по току, скорости и положению.
2. ТЕХНИЧЕСКИЙ ПРОЕКТ
Электропривод есть электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса. Современный электропривод – это совокупность множества электромашин, аппаратов и систем управления ими. В рамках данной курсовой работе в дальнейшем электропривод – аналоговая следящая система. Проектирование осуществлялось с использованием прикладной программы MatLab.
Многим соотношениям и операциям над функцией действительной переменной (оригинала) f(x) соответствуют более простые соотношения над их интегральным преобразованием Лапласа функцией W(s).
2.1. РАССЧЁТ ПАРАМЕТРОВ ОСНОВНЫХ ЭЛЕМЕНТОВ
2.1.1. РАСЧЁТ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ
Расчёт электромагнитной постоянной.
![]()
Расчёт постоянной двигателя по моменту.
![]()
Постоянная двигателя по скорости
![]()
Коэффициент усиления двигателя
![]()
Электромеханическая постоянная времени привода
![]()
Коэффициент редуктора
![]()
i – передаточное число редуктора.
2.1.2. РАСЧЁТ ПАРАМЕТРОВ ТИРИСТОРНОГО ПРЕОБРАЗОВАТЕЛЯ МОЩНОСТИ
Тиристорный преобразователь мощности (ТПМ) с достаточной степенью точности можно считать апериодическим. Питание электропривода осуществляется от сети трёхфазного тока с частотой 50 Гц.
Постоянная времени ТПМ
![]()
m=3 – количество фаз напряжения питания,
f=50Гц – частота источника питания (промышленная).
Коэффициент ТПМ
![]()
U=5В – максимальное напряжение на входе системы управления.
2.1.3. РАССЧЁТ ПАРМЕТРОВ ДАТЧИКОВ ОБРАТНОЙ СВЯЗИ
В качестве датчика скорости используется тахогенератор АТ-231 с максимальной скоростью вращения
![]()
и крутизной выходной характеристики
![]()
Перевод крутизны выходной характеристики тахогенератора в единицах ![]()
![]()
Перевод заданной амплитуды скорости движения объекта по синусоидальному закону в единицах ![]()
![]()
Коэффициент датчика обратной связи по скорости должен быть выражен в единицах ![]()
![]()
![]()
![]()
Коэффициент датчика обратной связи (ДОС) по положению выходного вала редуктора
![]()
2.2. ВЫВОД ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЭЛЕМЕНТОВ ЭЛЕКТРОПРИВОДА
Передаточная функция двигателя
![]()
где s – преобразователь Лапласа.
Передаточная функция тиристорного преобразователя мощности описывается апериодическим звеном и в численном выражении равно
![]()
2.3. ПОСТРОЕНИЕ СТРУКТУРНОЙ СХЕМЫ
Наличие передаточных функций элементов позволяет построить структурную схему. Для построения структурной схемы необходимо рассчитать
1.) добротность системы – рассчитывается как отношение максимальной скорости изменения выходного сигнала к скоростной ошибке;
2.) коэффициенты усиления сравнивающих устройств.
![]()
D – добротность системы,
V – максимальная скорость изменения выходного сигнала, об/c,
δV – скоростная ошибка, рад.
Сравнивающие устройства строятся на базе операционных усилителей. Операционный усилитель – это интегральная схема с большим коэффициентом усиления, большим входным и маленьким выходным сопротивлениями и предназначен для усиления постоянного или переменного тока.
Коэффициент усиления сравнивающего устройства во втором контуре, контуре скорости принят равным восьми
Кус2 =8.

Коэффициент усиления сравнивающего устройства (СУ) в первом контуре, контуре положения принят равным двум
Кус1 =2.
Структурная схема электропривода приведена на схеме 1.
Описание узлов системы:
- Step – источник задающего воздействия, 5В;
- Sum1, Sum2 – сравнивающие устройства (сумматоры);
- Display, Display1 – значение выходного сигнала в реальном времени;
- Gain, Gain1 – коэффициенты усиления СУ в контуре положения и скорости соответственно, Кус1 =2, Кус2 =8.
- Transfer FCN – передаточная функция ТПМ, ![]() ;
;
- Transfer FCN1 - передаточная функция двигателя, ![]() ;
;
- Integrator – редуктор описывается интегрирующем звеном, 1/s;
- Gain4 – коэффициент редуктора, 0,025;
- Scope – виртуальный осциллограф;
- Gain2, Gain3 – коэффициенты ДОС по скорости и по положению угла соответственно, ![]() ,
, ![]()
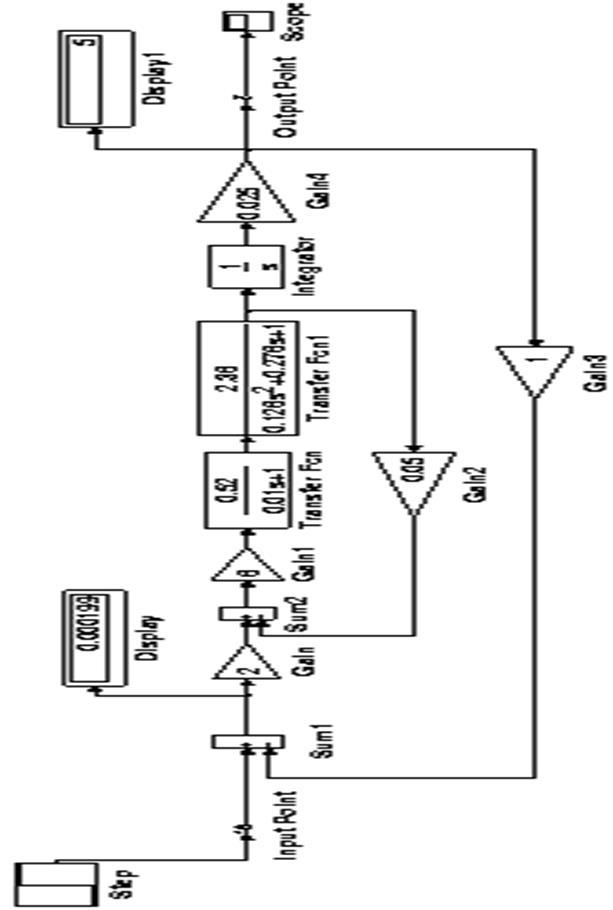
Схема 1. Структурная схема система.
2.4. ОПРЕДЕЛЕНИЕ КАЧЕСТВЕННЫХ ПОКАЗАТЕЛЕЙ СИСТЕМЫ
Для этих целей используется прикладная программа Simulink и её подпрограмма Control System Toolbox – инструментарий систем управления – предназначенный для моделирования, анализа и проектирования непрерывных автоматических систем. Пакет реализует методы исследования динамических систем, в основу которых положены передаточные функции и графические модели. Основным вычислительным ядром рассматриваемого пакета является программа подраздела LTI (Lienear Time-Invariant System - программа разработки линейных инвариантных во времени систем управления (СУ), которые в отечественной литературе называются линейными стационарными СУ). Программа LTI позволяет анализировать качественные показатели системы с помощью отображения графиков.
Получены следующие графики с помощью программы LTI:
1.) реакция системы на единичную ступенчатую функцию – график 1;
2.) реакция системы на единичную функцию – график 2;
3.) амплитудно-частотная и фазово-частотная характеристика (АЧХ и ФЧХ) системы – график 3;
4.) абсолютная величина изменения АЧХ – график 4;
5.) корневой годограф Найквиста – график 5;
6.) годограф Николса – график 6;
7.) карта нолей и полюсов – график 7.
На графиках даны следующие характеристики:
1.) Setting Time – время переходного процесса;
2.) Rise Time – максимальная скорость;
3.) Steady State – точка достижения заданного значения выходного параметра;
4.) Stability Margins (Minimum only, All crossing) – запас устойчивости;
5.) Pole – корни характеристического уравнения;
6.) Damping – коэффициент демпфирования;
7.) Overshoot – коэффициент перерегулирования;
8.) Frequency – период собственных колебаний;
9.) Peak Response – пик изменяющейся характеристики.
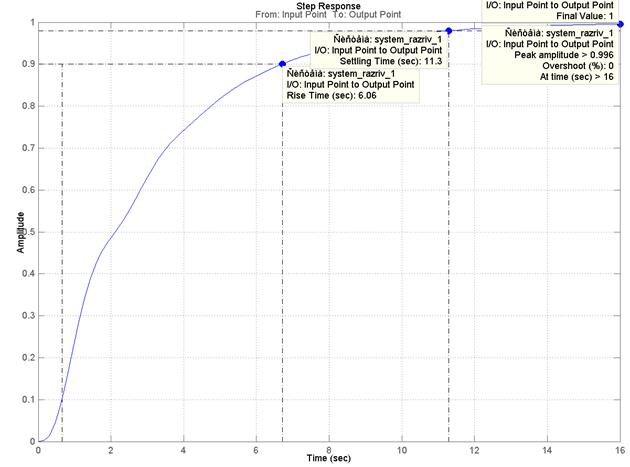
График 1. Реакция системы на единичную ступенчатую функцию.
Из графика 1 видно, что при времени переходного процесса 11,3 секунды процесс входит последний раз в пятипроцентную зону, перерегулирования нет, в целом, график переходного процесса похож на плавный апериодический.
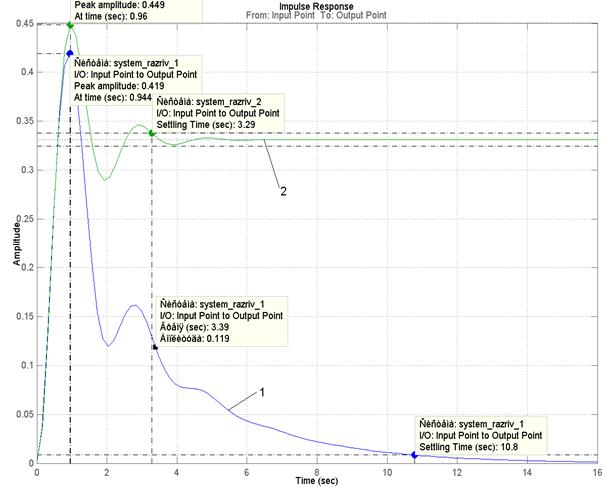
График 2. Реакция системы на единичную функцию (1 – система с отрицательными обратными связями, 2 – система без обратной связи в контуре положения).
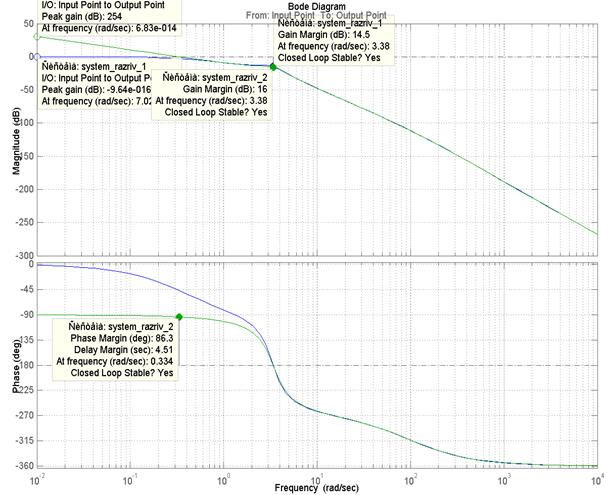
График 3. АЧХ и ФЧХ системы.
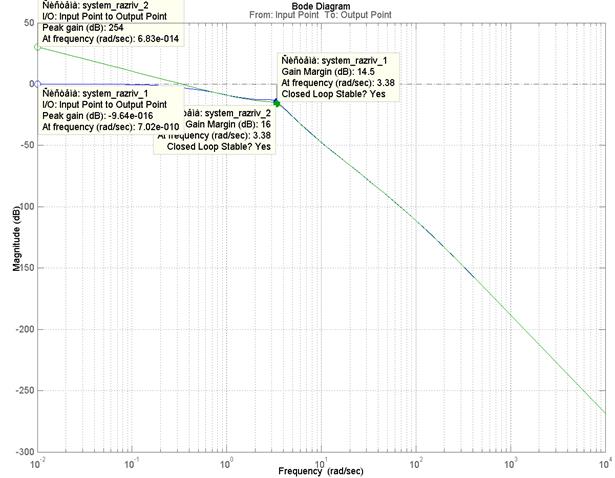 График 4. Абсолютная величина изменения АЧХ.
График 4. Абсолютная величина изменения АЧХ.
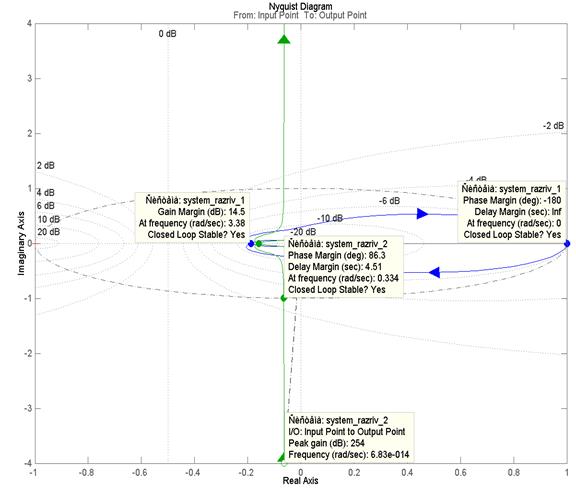
График 5. Корневой годограф Найквиста.
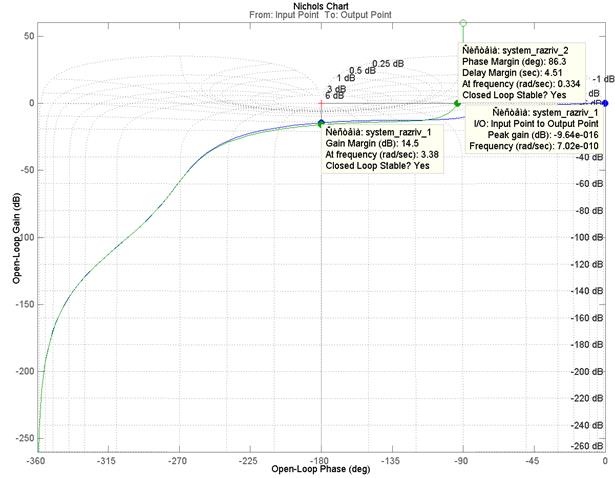
График 6. Годограф Николса.
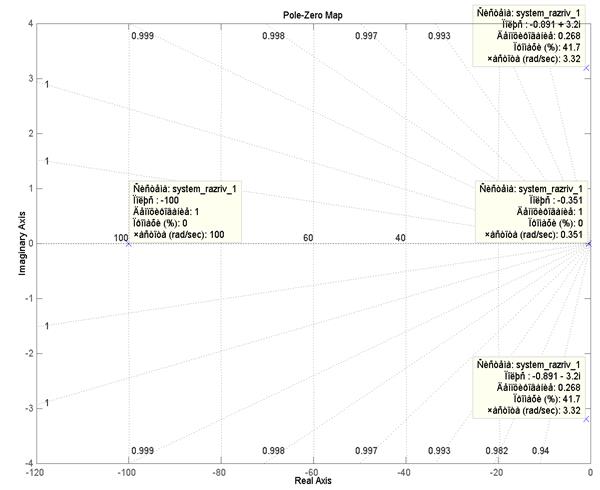
График 7. Карта нолей и полюсов.
На графике 7 представлена плоскость корней. График 7: можно определить устойчивость системы корневым методом. По графику s1=-100, s2=-0,351, s3=-0,891+3,2i, s4==-0,891+3,2i – это корни характеристического уравнения (приравниваем к нулю знаменатель суммарной передаточной функции). Все корни лежат в левой полуплоскости, следовательно, система устойчивая.
2.5. СИНТЕЗ СИСТЕМЫ
По техническому заданию необходимо, чтобы системы обладала следующим набором характеристик:
- коэффициент перерегулирования σн =16,3% и σ=6,3%,
- время переходного процесса tп =6c,
- время первого согласования t1 =1,38c,
- статическая погрешность δС =±0,157рад.
Для достижения заданных в техническом задании качественных показателей системы в замкнутый контур системы устанавливается пропорционально-интегро-дифференциальный регулятор (ПИД-регулятор) между ДОС по скорости и колебательным звеном ТПМ. Для расчета коэффициентов ПИД-регулятора используется прикладная программа Simulink с пакетом подпрограммы Nonlinear Control Design (NCD) (проектирование нелинейных систем управления), который предназначен для параметрической оптимизации замкнутых систем. Он является специализированной программой для решения задач оптимизации значений параметров при наличии ограничений в форме неравенств и использующий в качестве алгоритма оптимизации последовательное квадратичное программирование. В данной курсовой работе этот пакет прикладной программы используется для оптимизации коэффициентов ПИД-регулятора.
Перевод значений перерегулирования в радианы. Составим пропорцию
![]() , где
, где
5 – установившееся значение в радианах,
16,3 – значение нижнего перерегулирования в процентах, откуда
![]()
![]() - нижнее перерегулирование.
- нижнее перерегулирование.
Аналогично, для верхнего перерегулирования
![]()
![]() - верхнее перерегулирование.
- верхнее перерегулирование.
Расчёт в радианах пятипроцентной зоны:
![]()
![]()
![]()
В результате работы программы NCD получены следующие коэффициенты PID-регулятора при периоде квантования 0,05 секунды:
Kp=2,3153;
Ki=5,8446;
Kd=0,4191.
График переходного процесса системы с использованием PID-регулятора показан на рисунке 1 ниже.
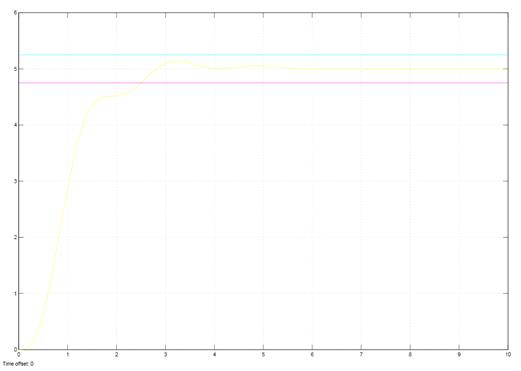
Рисунок 1. Переходный процесс с использованием PID-регулятора.
В результате, время переходного процесса снизилось на 8,8 секунды до 2,5 секунд, при времени первого согласования 1,38 секунд выход составляет 4,15 радиан, что удовлетворяет техническому заданию.
ЗАКЛЮЧЕНИЕ
В работе спроектирован электрический привод подач металлорежущего станка с применением PID-регулятора, удовлетворяющий требованиям tп =6c, t1 =1,38c, σ=6,3%, σн =16,3% и δС =±0,157рад. Коэффициенты PID-регулятора: Kp=2,3153, Ki=5,8446 и Kd=0,4191.
ПРИЛОЖЕНИЕ
ТЕХНИЧЕСКИЕ ДАННЫЕ ДВИГАТЕЛЯ СЛ-661
1. Номинальное напряжение Uн =110В.
2. Полезная мощность P=230Вт.
3. Скорость вращения ротора n=2400об/мин.
4. Ток якоря Iя =2,6А.
5. Ток обмотки возбуждения Iв =0,2А.
6. Момент на валу M=0,925Н∙м.
7. Сопротивление якоря Rя =1,73Ом.
8. Индуктивность якоря Lя =0,8Гн.
9. Момент инерции Jg =12∙10-3 кг∙м2 .
ЛИТЕРАТУРА
1. Конспект лекций по дисциплине «Проектирование автоматизированных систем».
2. Абакулина Л. И., Рахманова И. О. «Проектирование автоматизированных систем: Методические указания к выполнению курсовой работы» - С.-Пб.: СЗТУ, 2006г.
3. Конспект лекций по дисциплине «Теория автоматического управления».
4. Курсовая работа по дисциплине «Теория автоматического управления электромеханическими системами».
5. Курсовая работа по дисциплине «Программное обеспечение компьютерных систем управления».
Похожие работы
-
Теория резания и режущий инструмент
Федеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования Северо-Западный государственный заочный
-
Расчет разброса баллистических параметров
Федеральное агентство по образованию Государственное образовательное учреждение Высшего профессионального обучения Тульский Государственный университет
-
Расчёт кранового смесителя Д6-35
ФЕДЕРАЛЬНОЕ АГЕНтСТВО ПО ОБРАЗОВАНИЮ ГОУВПО «ИВАНОВСКИЙ ГОСУДАРСТВЕННЫЙ АРХИТЕКТУРНО-СТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ» Инженерно-строительный факультет
-
Отчет по практике ОАО Тобус
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ОБРАЗОВАНИЮ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ ВОРОНЕЖСКАЯ ГОСУДАРСТВЕННАЯ
-
Рассчитать основные размеры бражной колонны
Министерство образования и науки Российской Федерации Федеральное агентство по образованию ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра органической химии и пищевой технологии
-
Расчет настройки токарно затыловочного станка модели 96
Министерство образования и наук Украины Сумский государственный университет Кафедра «Технология машиностроения, станки и инструменты» Расчет настройки токарно – затыловочного станка модели 96
-
Исследование влияния температурных деформаций шпиндельного узла горизонтально-фрезерного станка на точность обработки
Исследование зависимости температурной деформации шпиндельного горизонтально-фрезерного станка (при холостом ходу) и его узлов от времени работы и охлаждения. Пути минимизации воздействия нагрева на успешность осуществления технологического процесса.
-
Метрологическое обеспечение аппарата химической промышленности при высоких требованиях к основны
Федеральное агентство по образованию РФ ТОЛЬЯТТИНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ Кафедра химии Контрольная работа по дисциплине "Метрология, стандартизация и сертификация"
-
Теплотехника 2
Федеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования «САМАРСКИЙ ГОСУДАРСТВЕННЫЙ АЭРОКОСМИЧЕСКИЙ УНИВЕРСИТЕТ имени академика С.П. КОРОЛЕВА» (СГАУ)
-
Проектирование технологического процесса механической обработки детали
Федеральное агентство по образованию РФ ВОСТОЧНО-СИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра МТОМ Расчетно-графическая работа №4.