Название: Разработка системы управления двигателя постоянного тока
Вид работы: курсовая работа
Рубрика: Физика
Размер файла: 435.31 Kb
Скачать файл: referat.me-340239.docx
Краткое описание работы: Параметры и структура автоматизированного электропривода. Алгоритм управления и расчёт параметров устройств управления, их моделирование, а также определение и оценка показателей качества. Разработка принципиальной электрической схемы, выбор её элементов.
Разработка системы управления двигателя постоянного тока
Содержание
Введение…………………………….…………………………………..................2
1. Определение параметров и структуры объекта управления.….…………….3
2. Разработка алгоритма управления и расчёт параметров устройств управления……………………………………………………………………...…7
3. Моделирование процессов управления, определение и оценка показателей качества…………………………………………………………………………..16
4. Разработка принципиальной электрической схемы и выбор её элементов.23
Список литературы.………………………………………….………………..…39
Введение
На современном этапе, характеризующемся приоритетным развитием машиностроения и автоматизации производства, автоматизированный электропривод сформировался как самостоятельное научное направление, в значительной степени определяющее прогресс в области техники и технологии, связанных с механическим движением, получаемым путем преобразования электрической энергии. Этим объясняется большой интерес специалистов к новым разработкам в данной отрасли техники и к ее научным проблемам.
Четко определился объект научного направления – система, отвечающая за управляемое электромеханическое преобразование энергии и включающая два взаимодействующих канала – силовой, состоящий из участка электрической сети, электрического, электромеханического, механического преобразователей, технологического рабочего органа, и информационный канал. В рамках данного курсового проекта рассматривается разработка информационного канала.
1. Определение параметров и структуры объекта управления
В состав объекта управления входит двигатель постоянного тока независимого возбуждения ![]() с параметрами по табл. 10.11 [1, стр. 277]:
с параметрами по табл. 10.11 [1, стр. 277]:
Данный ЭД предназначен для работы в широкорегулируемых электроприводах, соответствует ![]() , имеет защищенное исполнение, с независимой вентиляцией (асинхронный двигатель
, имеет защищенное исполнение, с независимой вентиляцией (асинхронный двигатель ![]() ).
).
Номинальная угловая скорость вращения
![]()
Максимальная угловая скорость вращения:
![]()
Номинальный ток якоря:
![]()
Суммарное сопротивление якорной цепи:
![]()
Произведение постоянной машины на номинальный поток:
![]()
Постоянная времени якорной цепи:
![]()
Номинальный момент:
![]()
Номинальный ток обмотки возбуждения:
![]()
Исходя из высоты оси вращения ![]() по табл. 1 [2, стр. 5]:
по табл. 1 [2, стр. 5]: ![]()
По рис. 4 [2, стр. 10]: ![]()
![]()
По рис. 2б [2, стр. 8]: ![]()
По табл. 2 [2, стр. 9] для класса изоляции ![]() :
: ![]()
По табл. 3 [2, стр. 10] для ![]() :
:
![]()
Окончательно получим:
![]()
По рис. 3 [2, стр. 9]: ![]()
Полюсное деление равно:
![]()
Число витков обмотки возбуждения [2, стр. 27]: ![]()
Номинальный магнитный поток:
![]()
Постоянная машины:
![]()
Коэффициент рассеяния [3, стр. 38]: ![]()
Индуктивность обмотки возбуждения:
![]()
Постоянная времени обмотки возбуждения:
![]()
Постоянная времени обмотки возбуждения:
![]()
Суммарный момент инерции механизма:
![]()
Так же объёкт управления содержит ![]() возбуждения и
возбуждения и ![]() напряжения якоря, частота коммутации которых:
напряжения якоря, частота коммутации которых: ![]()
Постоянная времени преобразователей равна:
![]()
Так как ![]() и
и ![]() представим преобразователи в виде пропорциональных звеньев, откуда с учетом диапазона стандартных управляющих сигналов (
представим преобразователи в виде пропорциональных звеньев, откуда с учетом диапазона стандартных управляющих сигналов (![]() ) имеем и максимальной скважности
) имеем и максимальной скважности ![]() (
(![]() ) получим:
) получим:
![]()
2. Разработка алгоритма управления и расчёт параметров устройств управления
Объект управления описывается следующими уравнениями [3, стр.38-39]:
Выберем двухконтурную систему управления скорости с внутренним контуром потока (рис. 1).
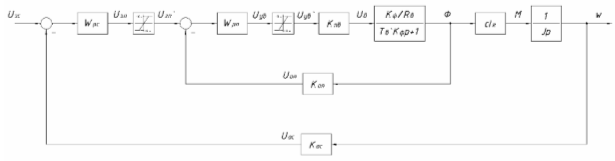
Рис. 1. Двухконтурная система регулирования скорости.
Универсальная кривая намагничивания представлена на рис. 3.
Так как регулирование происходит изменением потока, минимальный поток будет при максимальной скорости:
![]()
Минимальный ток возбуждения (по рис. 3):
![]()
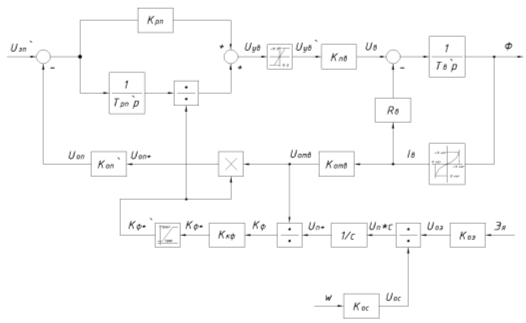
Рис. 3. Универсальная кривая намагничивания.
При этом коэффициент линеаризации кривой намагничивания лежит в диапазоне:
![]()
![]()
Максимальная постоянная времени потока:
![]()
Коэффициент форсирования тока возбуждения [4, стр. 559]:
![]()
Малая постоянная времени:
![]()
Желаемая передаточная функция замкнутого контура потока:
![]()
Желаемая передаточная функция разомкнутого контура потока:
![]()
Передаточная функция разомкнутого контура потока:
![]()
Коэффициент обратной связи по потоку:
![]()
Передаточная функция регулятора потока:
![]()
где
![]()
![]()
Коэффициент ![]() подлежит определению непрерывно, для чего контур потока будет модифицирован (рис. 4.).
подлежит определению непрерывно, для чего контур потока будет модифицирован (рис. 4.).
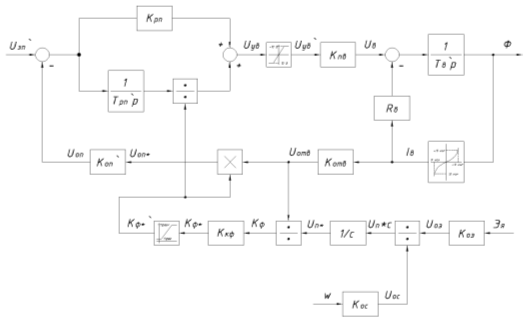
Рис. 4. Модифицированный контур регулирования потока.
Коэффициент обратной связи по скорости:
![]()
Коэффициент обратной связи ЭДС:
![]()
Коэффициент обратной связи по току возбуждения:
![]()
Коэффициент нормализации ![]()
![]()
С учётом этого:
![]()
![]()
Внешний контур скорости представлен на рис. 5.
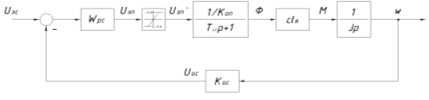
Рис. 5. Контур регулирования скорости.
Желаемая передаточная функция разомкнутого контура скорости:
![]()
Передаточная функция разомкнутого контура скорости:
![]()
Передаточная функция регулятора скорости
![]()
где
![]()
Так как нагрузка с постоянной мощностью изменяет знак ![]() и коэффициент
и коэффициент ![]() подлежит определению непрерывно контур скорости также будет модифицирован (рис. 6.).
подлежит определению непрерывно контур скорости также будет модифицирован (рис. 6.).
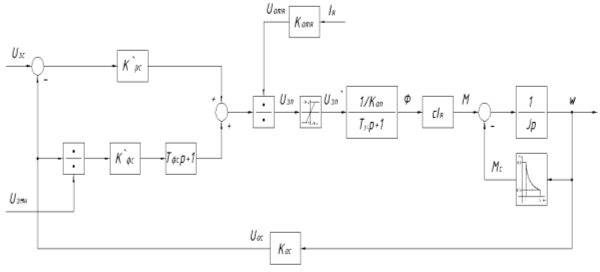
Рис. 6. Модифицированный контур регулирования скорости.
Коэффициент обратной связи по току якоря:
![]()
Отсюда следует:
![]()
Передаточная функция контура компенсирующего влияние нагрузки:
![]()
Коэффициент задания мощности нагрузки:
![]()
Откуда (с учётом принятых выше коэффициентов) имеем:
![]()
где
![]()
![]()
Структура системы управления стабилизатором напряжения в цепи якоря приведена на рис. 7.
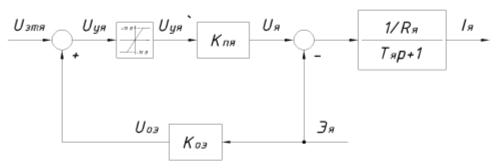
Рис. 7. Контур управления напряжением якоря.
Здесь:
![]()
Структурная схема всей системы управления и объекта приведена на рис. 8.
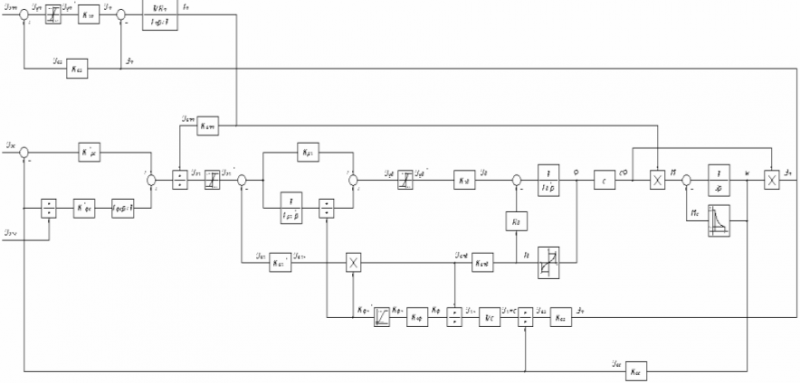
Рис. 8. Структурная схема системы управления и объекта.
3. Моделирование процессов управления, определение и оценка показателей качества
Модель объекта и системы управления в комплексе ![]() представлена на рис. 9.
представлена на рис. 9.
Моделирование будем проводить по нижеследующему алгоритму:
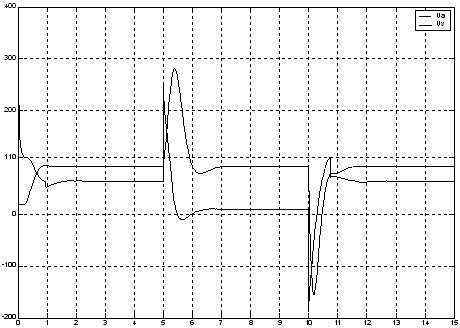
Пуск на номинальную скорость - ![]()
максимальный скачёк задания -![]() , (рис. 10 – рис. 14)
, (рис. 10 – рис. 14)
Проверка отработки задания
![]() (рис. 15 – рис. 10)
(рис. 15 – рис. 10)
 |
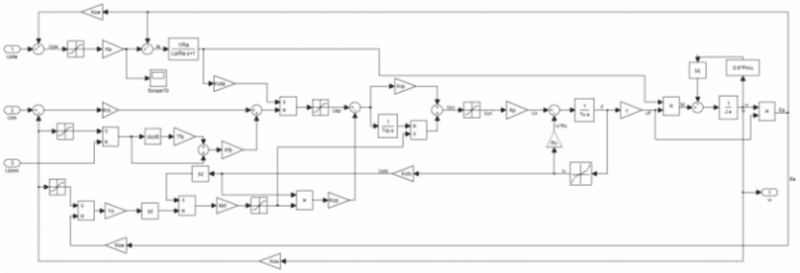
Рис. 9. Модель объекта и систему управления.
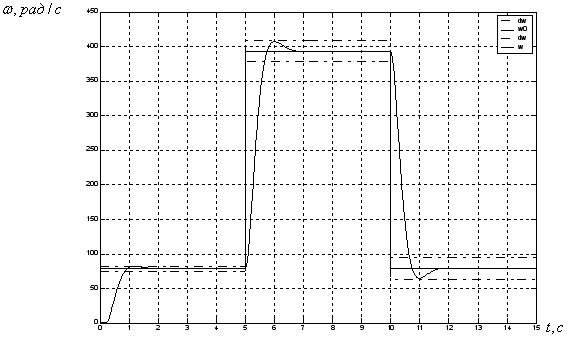
![]() Рис. 10. Зависимость
Рис. 10. Зависимость ![]() от времени.
от времени.
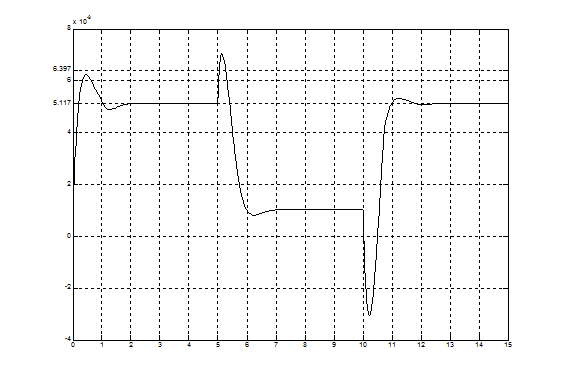
![]()
Рис. 11. Зависимость ![]() и
и ![]() от времени.
от времени.
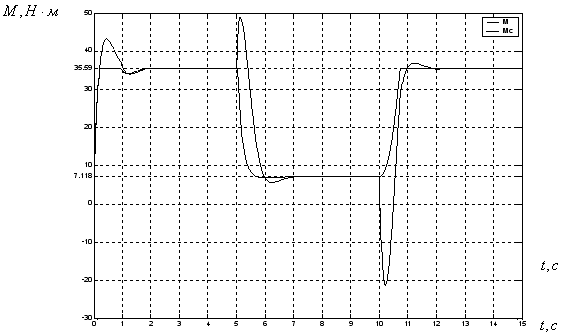
![]() Рис. 12. Зависимость
Рис. 12. Зависимость ![]() и
и ![]() от времени.
от времени.
![]()
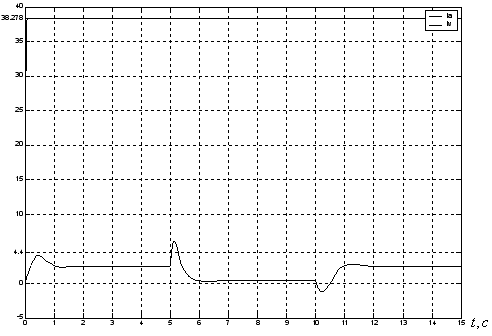
![]() Рис. 13. Зависимость
Рис. 13. Зависимость ![]() и
и ![]() от времени.
от времени.
![]()
![]() Рис. 14. Зависимость
Рис. 14. Зависимость ![]() от времени.
от времени.
![]()
![]()
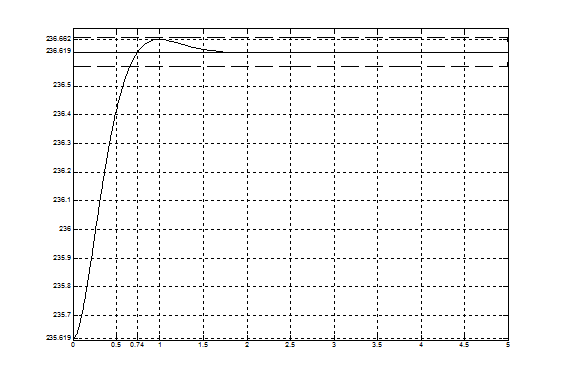
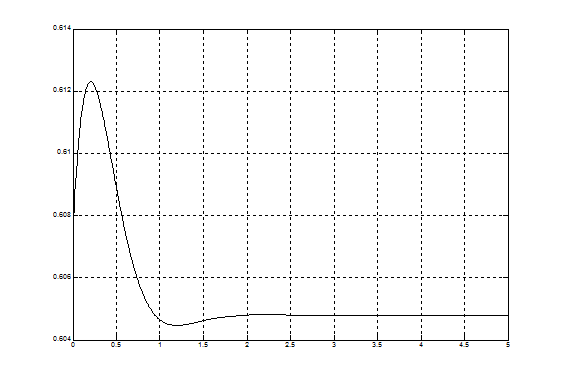
Рис. 15. Зависимость ![]() от времени.
от времени.
![]()
![]()
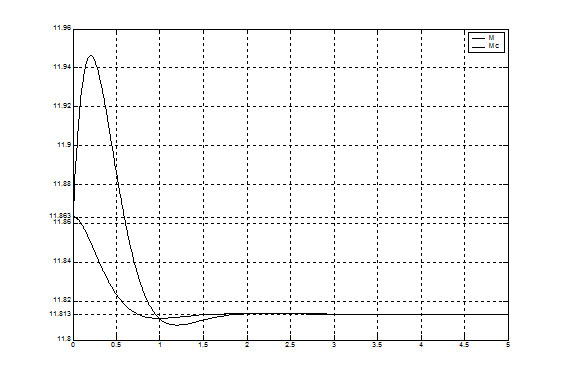
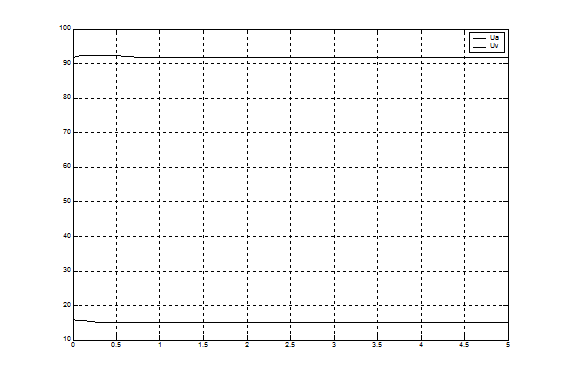
Рис. 16. Зависимость ![]() и
и ![]() от времени.
от времени.
![]()
![]() Рис. 17. Зависимость
Рис. 17. Зависимость ![]() от времени.
от времени.
![]()
![]() Рис. 18. Зависимость
Рис. 18. Зависимость ![]() и
и ![]() от времени.
от времени.
![]()

![]() Рис. 19. Зависимость
Рис. 19. Зависимость ![]() от времени.
от времени.
Для технического оптимума:
-перерегулирование составляет:
![]()
-время нарастания:
![]()
По результатам моделирования:
-перерегулирование составляет:
![]()
-время нарастания: ![]()
Статическая ошибка отсутствует.
Отсюда можно сделать вывод:
динамика и статика спроектированной системы полностью удовлетворяет требованиям технического задания.
4. Разработка принципиальной электрической схемы и выбор её элементов
Обратная связь по скорости.
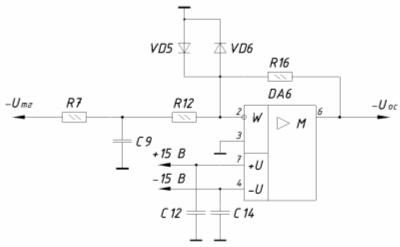
Рис. 20. Обратная связь по скорости.
Схема обратной связи по скорости представлена на рис. 20, здесь:
-фильтр коллекторных пульсаций тахогенератора с ![]() :
:
![]() -
- ![]() ,
,
![]() -
- ![]()
-цепь защиты от обрыва обратной связи:
![]() -
- ![]() с параметрами
с параметрами
![]() - максимальный прямой ток,
- максимальный прямой ток,
![]() - прямое напряжение,
- прямое напряжение,
![]() - максимальное обратное напряжение,
- максимальное обратное напряжение,
![]() - ёмкость диода,
- ёмкость диода,
![]() - максимальная рабочая частота;
- максимальная рабочая частота;
-тахогенератор ![]() встроенный в двигатель:
встроенный в двигатель:
![]()
-коэффициент усиления схемы:
![]() ,
,
![]() ,
,
![]() -
- ![]() ,
,
![]()
![]() ;
;
-усилительный элемент:
![]() -
-![]() с параметрами
с параметрами
![]() - напряжение питания,
- напряжение питания,
![]() - максимальное выходное напряжение,
- максимальное выходное напряжение,
![]() - входной ток,
- входной ток,
![]() - коэффициент нарастания напряжения,
- коэффициент нарастания напряжения,
![]() - коэффициент усиления по напряжению,
- коэффициент усиления по напряжению,
![]() - максимальная рабочая частота;
- максимальная рабочая частота;
-фильтр пульсаций напряжения питания усилителя:
![]() -
- ![]() ,
,
Обратная связь по току якоря.
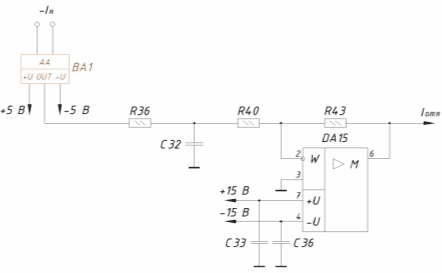
Рис. 21. Обратная связь по току якоря.
Схема обратной связи по току якоря представлена на рис. 21, здесь:
-фильтр пульсаций ![]() с
с ![]() :
:
![]() -
- ![]() ,
,
![]() -
- ![]() ;
;
-датчик тока:
![]() -
- ![]() с параметрами :
с параметрами :
![]() - номинальный входной ток,
- номинальный входной ток,
![]() - напряжение питания,
- напряжение питания,
![]() - сопротивление нагрузки,
- сопротивление нагрузки,
![]() - коэффициент датчика тока;
- коэффициент датчика тока;
-коэффициент усиления схемы:
![]()
![]() -
- ![]() ,
,
![]()
-![]() ,
,
-усилительный элемент: ![]() -
-![]() ;
;
-фильтр пульсаций напряжения питания усилителя: ![]() -
- ![]() .
.
Обратная связь по току возбуждения.
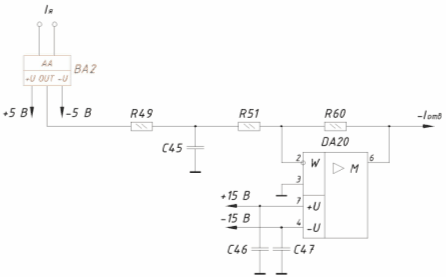
Рис. 22. Обратная связь по току возбуждения.
Схема обратной связи по току возбуждения представлена на рис. 22, здесь:
-фильтр пульсаций ![]() с
с ![]() :
:
![]() -
- ![]() ,
,
![]() -
- ![]() ;
;
-датчик тока:
![]() -
- ![]() с параметрами
с параметрами
![]() - номинальный входной ток,
- номинальный входной ток,
![]() - напряжение питания,
- напряжение питания,
![]() - сопротивление нагрузки,
- сопротивление нагрузки,
![]() - коэффициент датчика тока;
- коэффициент датчика тока;
-коэффициент усиления схемы:
![]() ,
,
![]() -
- ![]() ,
,
![]()
![]() ,
,
-усилительный элемент: ![]() -
-![]() ;
;
-фильтр пульсаций напряжения питания усилителя: ![]() -
- ![]() .
.
Обратная связь по ЭДС.
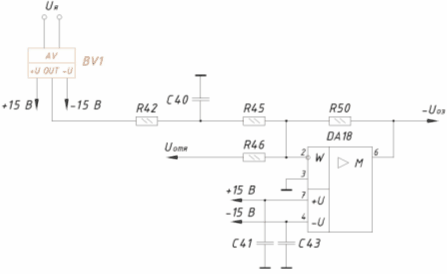
Рис. 23. Обратная связь по ЭДС.
Схема обратной связи по ЭДС представлена на рис. 23, здесь:
-фильтр пульсаций ![]() с
с ![]() :
:
![]() -
- ![]() ,
,
![]() -
- ![]() ;
;
-датчик напряжения:
![]() -
- ![]() с параметрами :
с параметрами :
![]() - номинальный входной ток,
- номинальный входной ток,
![]() - напряжение питания,
- напряжение питания,
![]() - сопротивление нагрузки,
- сопротивление нагрузки,
![]() - коэффициент датчика напряжения;
- коэффициент датчика напряжения;
-коэффициент усиления схемы:
![]()
![]() -
- ![]() ,
,
![]()
-![]() ,
,
![]()
-![]() ,
,
-усилительный элемент: ![]() -
-![]() ;
;
-фильтр пульсаций напряжения питания усилителя: ![]() -
- ![]()
Обратная связь по потоку.
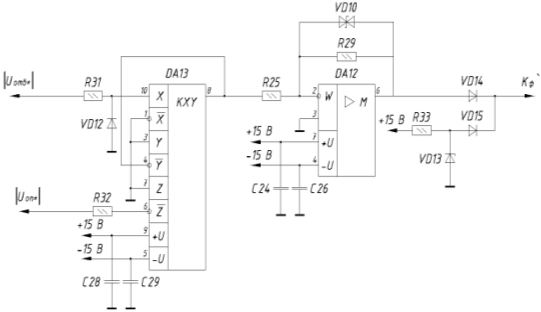
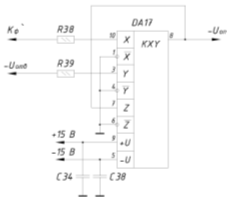
Рис. 24. Обратная связь по потоку.
Схема обратной связи по потоку представлена на рис. 24, здесь:
-коэффициент усиления схемы:
![]() ,
,
![]() -
- ![]() ,
,
![]() -
- ![]() ,
,
![]()
-![]() ,
,
![]()
-![]() ;
;
-защита от отрицательного напряжения: ![]() -
-![]()
-ограничение ![]() :
:
![]() -
-![]() с параметрами:
с параметрами:
![]() - напряжение стабилизации,
- напряжение стабилизации,
![]() - ток стабилизации;
- ток стабилизации;
![]() -
-![]() с параметрами:
с параметрами:
![]() - напряжение стабилизации,
- напряжение стабилизации,
![]() - ток стабилизации;
- ток стабилизации;
![]() -
-![]() ;
;
![]() -
-![]()
-перемножитель напряжения: ![]() -
- ![]() с параметрами:
с параметрами:
![]() - напряжение питания,
- напряжение питания,
![]() - максимальное выходное напряжение,
- максимальное выходное напряжение,
![]() - входной ток,
- входной ток,
![]() - коэффициент нарастания напряжения,
- коэффициент нарастания напряжения,
![]() - коэффициент умножения,
- коэффициент умножения,
![]() - максимальная рабочая частота;
- максимальная рабочая частота;
-усилительный элемент: ![]() -
-![]() ;
;
-фильтр пульсаций напряжения питания: ![]() -
- ![]() .
.
Модульная функция.
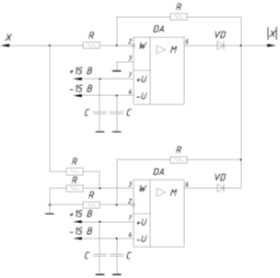
Рис. 24. Модульная функция.
Схема модульной функции представлена на рис. 24, здесь:
-сопротивления: ![]() -
-![]() ;
;
-усилительный элемент: ![]() -
-![]() ;
;
-фильтр пульсаций напряжения питания усилителя: ![]() -
- ![]() .
.
Регулятор скорости.

Рис. 25. Регулятор скорости.
Схема регулятора скорости представлена на рис. 25, здесь:
-компенсация нагрузки:
![]() -
- ![]() ,
,
![]()
![]()
![]()
![]() -
-![]() ,
,
![]() -
-![]() ,
,
![]()
![]() ,
,
![]() -
-
![]() ,
,
![]() -
-
![]() ,
,
![]() -
-
![]() ,
,
![]() -
-![]() ;
;
-усилительный элемент: ![]() -
-![]()
-перемножитель напряжения: ![]() -
- ![]() с параметрами
с параметрами
-ограничение сигналов:
![]() -
-![]() ,
,
![]() -
-![]() ,
,
![]() -
-![]()
-фильтр пульсаций напряжения питания усилителя: ![]() -
- ![]()
Регулятор потока.
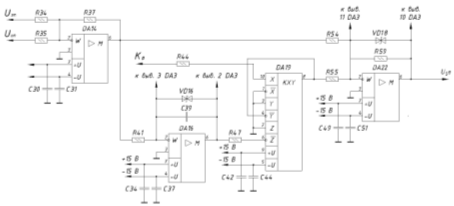
Рис. 26. Регулятор потока.
Схема регулятора потока представлена на рис. 26, здесь:
-компенсация нагрузки:
![]() -
- ![]() ,
,
![]() -
- ![]() ,
,
![]() -
-![]() ,
,
![]() -
-
![]() ,
,
![]() -
-![]()
-усилительный элемент: ![]() -
-![]() ;
;
-перемножитель напряжения: ![]() -
- ![]() ;
;
-ограничение сигналов: ![]() -
-![]() ;
;
-фильтр пульсаций напряжения питания усилителя: ![]() -
- ![]() .
.
Управление стабилизатором напряжения якоря.
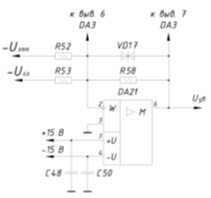
Рис. 27. Управление стабилизатором напряжения якоря.
Схема управление стабилизатором напряжения якоря представлена на рис. 27, здесь:
![]() -
- ![]() ,
,
![]() -
-![]() ,
,
![]() -
-![]() ,
,
![]() -
-![]() ,
,
Реле защиты.
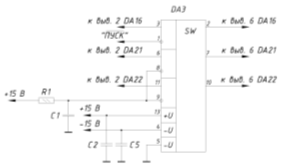
Рис. 28. Реле защиты.
Схема реле защиты представлена на рис. 28, здесь:
![]() -
-![]() ,
,
![]() -
-![]() ,
,
![]() -
-![]() ,
,
![]() -
-![]()
Список литературы
1. Справочник по электрическим машинам: В 2 т./ Под общ. Ред. И. П. Копылова и Б. К. Клокова. Т. 1. – М.: Энегроатомиздат, 1988, - 456 с.
2. Заборщикова А. В., Мельников В. И. «Двигатели постоянного тока для автоматизированного электропривода»: Учебное пособие. – СПб: Петербургский гос. ун-т путей сообщ., 1994. – 84 с.
3. Башарин А. В., Новиков В. А., Соколовский Г. Г. «Управление электроприводами» : Учебное пособие для вузов. – Л.: Энергоатомиздат. Ленингр. Отд-ние, 1982. – 392 с., ил.
4. Ключев В. И. «Теория электропривода»: Учеб. Для вузов. – 2-е изд. Перераб. И доп. – М.: Энегроатомиздат, 2001. – 704 с.: ил
5. Герман-Галкин С. Г. И др. Цифровые электроприводы с транзисторными преобразователями. - Л.: Энергоатомиздат. Ленинградское отделение, 1986.–246 с.
4. Справочник разработчика и конструктора РЭА. Элементная база : В 2 кн. / Масленников М. Ю., Соболева Е. А и др. – М.: Б. И., 1996.-157-300с.
5. Операционные усилители и компараторы. – М.: Издательский дом «ДОДЭКА ХХI», 2002.-560 с.
. Бурков А. Т. Электронная техника и преобразователи: Учеб. Для вузов ж.–д. трансп. – М.: Транспорт, 1999.-464 с.
6. Александров К. К., Кузьмина Е. Г. Электротехнические чертежи и схемы. – М.: Энергоатомиздат, 1990.-288с.
Похожие работы
-
Исследование системы управления скоростью электропривода с упругим звеном в передаточном механизме
Основные технические характеристики двигателя Д816-150-470. Использование двигателя в номинальном режиме вместе со стабилизирующей обмоткой. Расчёт необходимых для синтеза и экспериментирования данных. Синтез модального регулятора. Полином системы.
-
Изучение реверсивного магнитного пускателя
Изучение реверсивного магнитного пускателя Цель работы: Научиться собирать схему управления двигателя при помощи реверсивного магнитного пускателя, исследовать работу схемы управления асинхронного двигателя.
-
Рассчет параметров электропривода
Данные двигателя постоянного тока независимого возбуждения со стабилизирующей обмоткой быстроходного исполнения. Расчет параметров электропривода. Коэффициент усиление тиристорного преобразователя. Структурная схема системы подчиненного управления.
-
Разработка электропривода лифта для высотного здания
Оценка динамических показателей и качества регулирования скорости перемещения. Анализ и описание системы "электропривод – сеть" и "электропривод – оператор". Расчет статических механических и электромеханических характеристик двигателя и привода.
-
Математические модели в расчетах
Создание математической модели трехконтурной электрической схемы в среде табличного процессора Excel. Система уравнений для расчета контурных токов. Схема электрической цепи. Влияние изменения параметров схемы тяговой сети на токи тяговых подстанций.
-
Проектирование систем электрификации
Особенности разработки принципиальной электрической схемы управления системой технологических машин. Обоснование выбора силового электрооборудования, аппаратуры управления и защиты. Характеристика методики выбора типа щита управления и его компоновки.
-
Микропроцессорная техника и аппаратура контроля в рабочих машинах
Министерство образования и науки Украины Сумский Государственный Университет Расчетно-графическая работа по курсу: ”Микропроцессорная техника и аппаратура контроля
-
Разработка и монтаж лабораторного стенда на основе преобразователя ЭТ6
Разработка тиристорного преобразователя на основе унифицированного электропривода серии ЭТ6; состав и принцип работы составных частей. Сборка лабораторного стенда автоматизированного электропривода постоянного тока; технические данные и условия работы.
-
Моделирование асинхронного двигателя
Угловая скорость вращения магнитного поля. Математическая модель асинхронного двигателя в форме Коши, а также блок-схема его прямого пуска с использованием Power System Blockset. Зависимость угловой скорости ротора от величины электромагнитного момента.
-
Расчет параметров вентильного электропривода
Принцип действия вентильного электропривода. Формирование вращающего момента, результирующей намагничивающей силы. Электрическая схема переключения полюсов вентильного электропривода. Моделирование переходных процессов. Суммарный момент возмущения.