Название: Исследование системы управления скоростью электропривода с упругим звеном в передаточном механизме
Вид работы: дипломная работа
Рубрика: Физика
Размер файла: 239.71 Kb
Скачать файл: referat.me-341810.docx
Краткое описание работы: Основные технические характеристики двигателя Д816-150-470. Использование двигателя в номинальном режиме вместе со стабилизирующей обмоткой. Расчёт необходимых для синтеза и экспериментирования данных. Синтез модального регулятора. Полином системы.
Исследование системы управления скоростью электропривода с упругим звеном в передаточном механизме
Исходные данные:
| Режим управления |
Диапазон, отн. ед. |
Тип двигателя |
Тип и величина нагрузки, отн. ед. |
|
|
| программный |
0,1 … 0,8 |
Д816-150-470 |
вязкое тр.2-ого рода; к=1 |
2 |
10 |
Выполнения работы:
Основные технические характеристики двигателя Д816-150-470:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
примечание:
двигатель в данном номинальном режиме используется вместе со стабилизирующей обмоткой.
Расчёт необходимых для синтеза и экспериментирования данных:
а) Электромеханическая часть:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Учитывая диапазон регулирования:
![]()
![]()
б) Двухмассовая часть:
![]()
![]()
Учитывая, что для вязкого трения 2-ого рода зависимость ![]() от
от ![]() нелинейная, линеаризуем её в рабочем диапазоне скоростей:
нелинейная, линеаризуем её в рабочем диапазоне скоростей:
 ;
;
![]()
![]()
![]()
Синтез модального регулятора:
Система дифференциальных уравнений объекта регулирования:
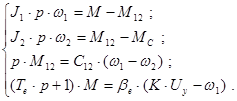
Выберем вектор переменных состояний:
![]() ,
,
отсюда имеем:
![]()
Сделаем подстановку:
![]()
![]()


Решая данную систему дифференциальных:
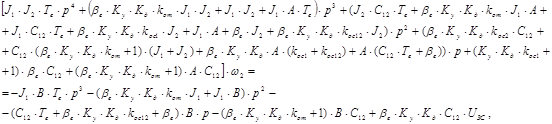
откуда характеристический полином системы:
![]()
![]()
![]()
![]()
![]()
![]()
Нормируем характеристический полином, выбирая 
![]()
где ![]()
![]()
![]()
![]()
![]()
Для отработки программного задания настроим данную систему на модульный оптимум.
Зададимся:
![]()
![]() .
.
![]()
![]()
![]()
Решая данную систему с помощью комплекса MATCAD 2001., находим коэффициенты обратных связей по переменным состояния:
![]()
![]()
![]()
Определим ![]() :
:

Определим зависимость частоты вращения двигателя от напряжения задания:
![]()
Определим зависимость идеальной скорости холостого хода от задания:
![]()
Для границ диапазона регулирования имеем:
![]()
![]()
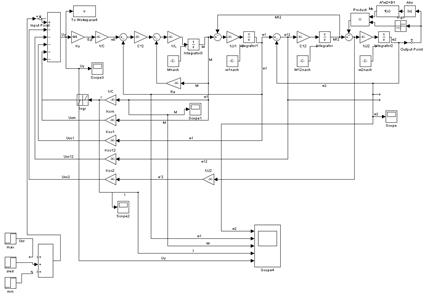
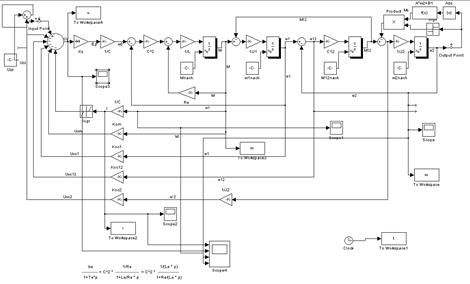
Выполним моделирование электропривода постоянного тока с управляемым преобразователем в цепи якоря и упругой механической частью.
Модель объекта управления с модальным регулятором в среде MATLAB 6.1.:
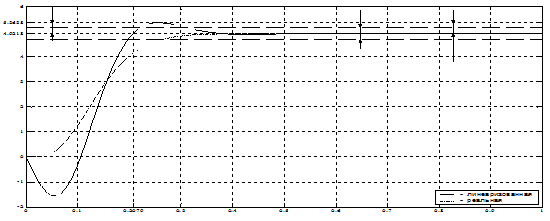
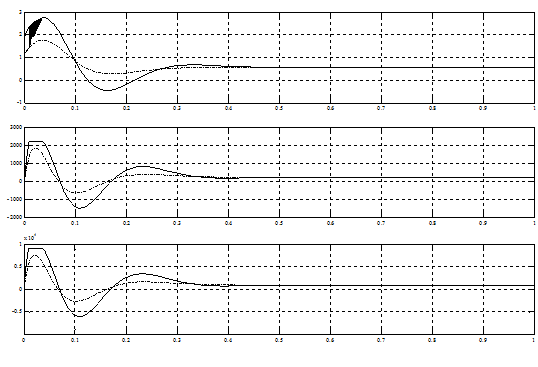
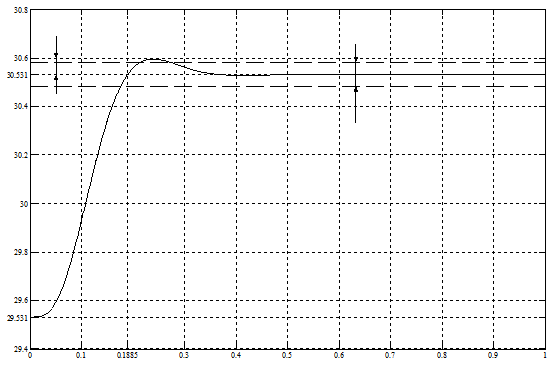
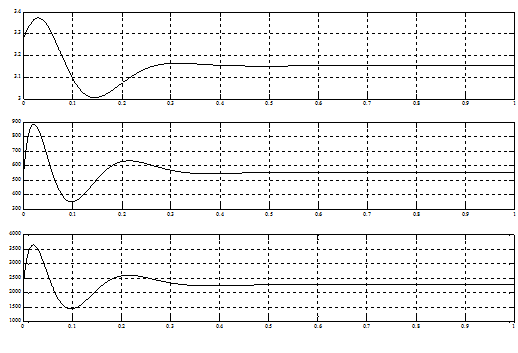
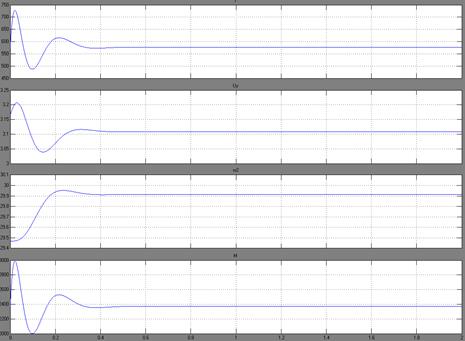
Результаты моделирования:
Пуск до ![]()
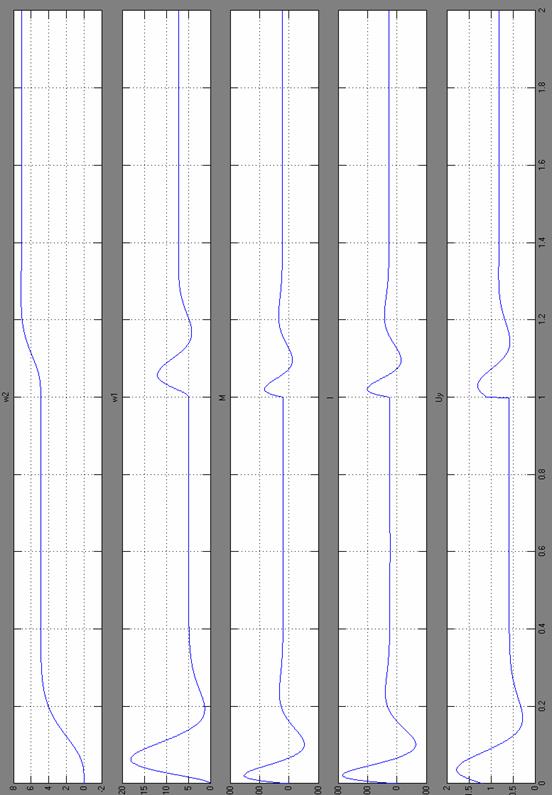 |
Пуск до
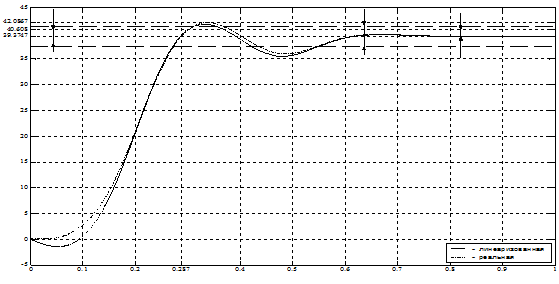
Результаты моделирования:
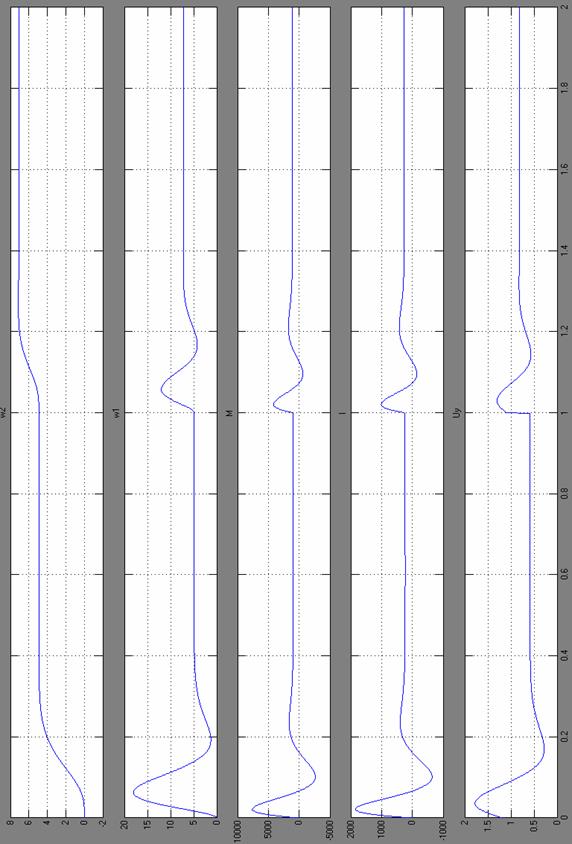 |
Пуск до
 |
![]()
![]()
![]()
![]()
![]()
![]()
Пуск до ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
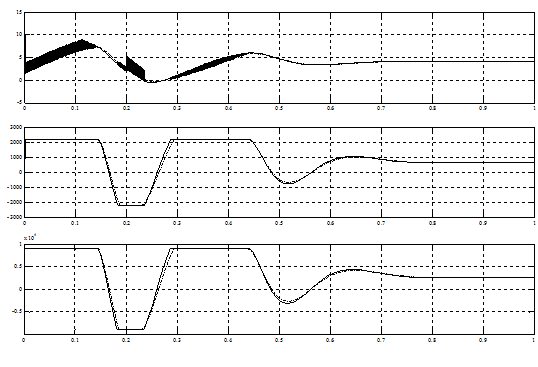
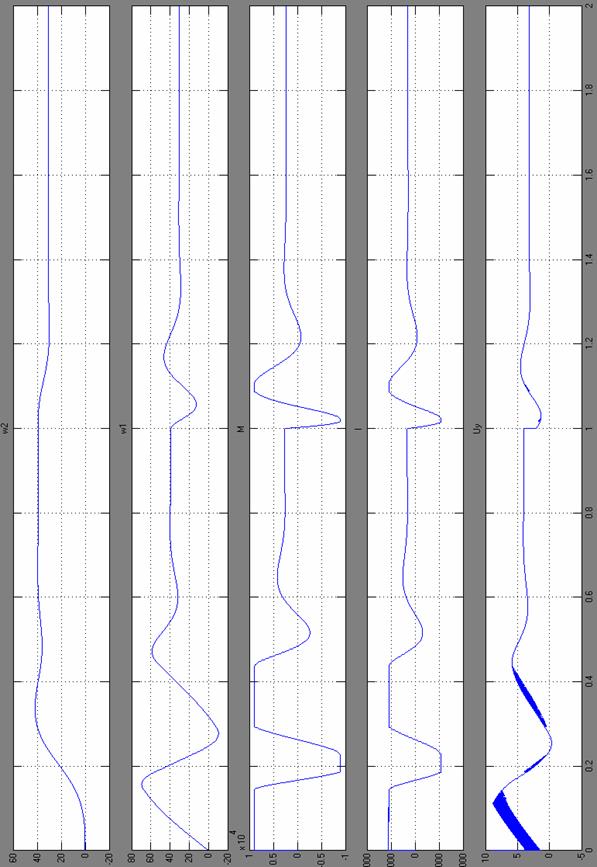
Проверка отработки задания ![]() ,
, ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Похожие работы
-
Электропривод 3
Цель работы : Исследования электромеханических ω ) и механических характеристик при различных режимах работы и способах регулирования скорости электропривода с двигателем постоянного тока независимого возбуждения.
-
Механика электропривода
Министерство образования и науки Украины Донбасский государственный технический университет Кафедра “Автоматизированные электромеханические системы ”
-
Двигатели постоянного тока
Двигатели постоянного тока используются в прецизионных приводах, требующих плавного регулирования частоты вращения в широком диапазоне. Свойства двигателя постоянного тока, так же как и генераторов, определяются способом возбуждения и схемой включения обмоток возбуждения. По способу возбуждения можно разделить двигатели постоянного тока на двигатели с электромагнитным и магнитоэлектрическим возбуждением.
-
Исследование режимов работы системы генератор-двигатель
Техническое задание 1. Произвести расчет электромагнитных процессов импульсного регулятора тока возбуждения генератора при пяти значениях скважности
-
Выбор асинхронного двигателя
Обоснованный выбор типов и вариантов асинхронного двигателя. Пусковой момент механизма, определение установившейся скорости. Расчёт номинальных параметров и рабочего режима асинхронного двигателя. Параметры асинхронного двигателя пяти исполнений.
-
Изучение реверсивного магнитного пускателя
Изучение реверсивного магнитного пускателя Цель работы: Научиться собирать схему управления двигателя при помощи реверсивного магнитного пускателя, исследовать работу схемы управления асинхронного двигателя.
-
Расчет основных параметров двигателя постоянного тока
Отображение двигателя в режиме динамического торможения. Расчет пускового реостата и построение пусковых характеристик для двигателя постоянного тока с параллельным возбуждением. Запись уравнения скоростной характеристики с учетом требуемых параметров.
-
Рассчет параметров электропривода
Данные двигателя постоянного тока независимого возбуждения со стабилизирующей обмоткой быстроходного исполнения. Расчет параметров электропривода. Коэффициент усиление тиристорного преобразователя. Структурная схема системы подчиненного управления.
-
Расчет параметров вентильного электропривода
Принцип действия вентильного электропривода. Формирование вращающего момента, результирующей намагничивающей силы. Электрическая схема переключения полюсов вентильного электропривода. Моделирование переходных процессов. Суммарный момент возмущения.
-
Расчет и построение механической характеристики электродвигателя
Механическая характеристика рабочей машины, приведённой к угловой скорости вала электродвигателя. Передаточное число передачи электродвигателя к рабочей машине. Продолжительность пуска электродвигателя с нагрузкой. Потери энергии в асинхронном двигателе.