Название: Анализ динамического поведения механической системы
Вид работы: реферат
Рубрика: Физика
Размер файла: 88.16 Kb
Скачать файл: referat.me-340838.docx
Краткое описание работы: Исследование динамического поведения механической системы с использованием теорем и уравнений теоретической механики. Дифференциальное уравнение движения механической системы. Законы движения первого груза, скорость и ускорение в зависимости от времени.
Анализ динамического поведения механической системы
Содержание:
Аннотация
Исходные данные
1. Применение основных теорем динамики механической системы
1.1 Постановка второй основной задачи динамики системы
1.2 Определение закона движения системы
1.3 Определение реакций внешних и внутренних связей
2. Построение алгоритма вычислений
3. Применение принципа Даламбера-Лагранжа и уравнений Лагранжа второго рода.
3.1 Составление дифференциального уравнения движения механизма с помощью принципа Даламбера-Лагранжа.
Анализ результатов
Аннотация
Дана механическая система с одной степенью свободы, представляющая собой совокупность абсолютно твердых тел, связанных друг с другом посредством невесомых растяжимых нитей, параллельных соответствующим плоскостям. Система снабжена внешней упругой связью с коэффициентом жесткости с. На первое тело системы действует сила сопротивления ![]() и возмущающая гармоническая сила
и возмущающая гармоническая сила ![]() . Трением качения и скольжения пренебрегаем. Качение катков происходит без скольжения, проскальзывание нитей на блоках отсутствует. Применяя основные теоремы динамики системы и аналитические методы теоретической механики, определен закон движения первого тела и реакции внешних и внутренних связей. Произведен численный анализ полученного решения с использованием ЭВМ.
. Трением качения и скольжения пренебрегаем. Качение катков происходит без скольжения, проскальзывание нитей на блоках отсутствует. Применяя основные теоремы динамики системы и аналитические методы теоретической механики, определен закон движения первого тела и реакции внешних и внутренних связей. Произведен численный анализ полученного решения с использованием ЭВМ.
Исходные данные:
| m = 1 кг | ||
| r = 0.1 м | с = 4000 H/м | |
Часть 1. Применение основных теорем динамики механической системы
1.1 Постановка второй основной задачи динамики системы .
Расчетная схема представлена на рисунке 1.
Здесь обозначено:
![]() ;
; ![]() ;
;
![]() -
силы тяжести;
-
силы тяжести;
![]() - нормальная реакция опорной плоскости;
- нормальная реакция опорной плоскости;
![]() -
сила сцепления;
-
сила сцепления;
![]() - упругая реакция пружины;
- упругая реакция пружины;
![]() - реакция подшипников;
- реакция подшипников;
![]() - сила вязкого сопротивления;
- сила вязкого сопротивления;
![]() - возмущающая сила.
- возмущающая сила.
Рассматриваемая механическая система имеет одну степень свободы (нити нерастяжимые, качение катка (3) происходит без скольжения). Будем определять ее положение с помощью координаты S. Начало отсчета координаты совместим с положением статического равновесия центра масс груза (1).
Для построения дифференциального уравнения движения системы используем теорему об изменении кинетической энергии механической системы в форме:
![]()
![]() - сумма мощностей внешних сил;
- сумма мощностей внешних сил;
![]() - сумма мощностей внутренних сил;
- сумма мощностей внутренних сил;
Тогда кинетическая энергия системы равна сумме кинетических энергий тел,
(1.2) ![]()
(1.3) Груз (1) совершает поступательное движение, ![]()
![]() ;
;
(1.4) Блок (2) совершает вращательное движение, ![]()
![]() , где
, где ![]()
(1.5) Каток (3) совершает плоскопараллельное движение, ![]()
![]() , где
, где ![]()
Кинетическая энергия всего механизма равна:
(1.6) ![]() ;
;
Выразим – через скорость груза (1)
![]()
![]()
![]()
(1.7) ![]() ;
; ![]() ;
;
Подставляя кинематические соотношения (1.7) в выражение (1.6), получаем:
(1.8) ![]()
(1.9) ![]()
![]() ;
;
Найдем производную от кинетической энергии по времени:
(1.10) ![]()
Вычислим сумму мощностей внешних и внутренних сил. Мощность силы равна скалярному произведению вектора силы на скорость в точке ее приложения;
(1.11) ![]()
Рассматриваемая нами механическая система является неизменяемой, т.е. тела, входящие в систему, недеформируемые и скорости их точек относительно друг друга равны нулю. Поэтому сумма мощностей всех внутренних сил будет равняться нулю:
(1.12) ![]() = 0;
= 0;
Будут равняться нулю и мощности следующих внешних сил, приложенных в точках, скорости которых равны нулю:
![]()
Сумма мощностей остальных внешних сил:
(1.13) ![]()
С учетом кинематических соотношений (1.7) сумму мощностей внешних сил определим:
(1.14) ![]()
где ![]() приведенная сила.
приведенная сила.
Упругую силу считаем пропорциональной удлинению пружины, которое равно сумме статического ![]() и динамического
и динамического ![]() удлинений:
удлинений:
(1.15) ![]()
Сила вязкого сопротивления ![]() , тогда
, тогда
(1.16) ![]()
В состоянии покоя системы приведенная сила равна нулю. Полагая в (1.16) S=0, ![]() =0 и F(t)=0, получаем условие равновесия системы:
=0 и F(t)=0, получаем условие равновесия системы:
(1.17) ![]()
Отсюда статическое удлинение пружины равно:
(1.18) ![]()
Подставляя (1.18) в (1.16), получаем окончательное выражение для приведенной силы:
(1.19) ![]()
Подставив выражения для производной от кинетической энергии и сумму мощностей всех сил с учетом (1.19) в (1.1), получаем дифференциальное уравнение движения системы:
(1.20) ![]()
(1.21) ![]()
где k циклическая частота свободных колебаний;
![]()
n – показатель степени затухания колебаний;
1.2 Определение закона движения системы
Проинтегрируем дифференциальное уравнение (1.20). общее решение этого неоднородного уравнения складывается из общего решения однородного уравнения ![]() и частного решения неоднородного
и частного решения неоднородного ![]() :
:
S = ![]() +
+ ![]() ;
;
Однородное дифференциальное уравнение, соответствующее данному неоднородному, имеет вид: ![]()
Составим характеристическое уравнение и найдем его корни:
т.к. n < k => решение однородного уравнения имеет вид:
![]()
где ![]() частное решение дифференциального уравнения ищем в виде правой части:
частное решение дифференциального уравнения ищем в виде правой части: ![]()
![]() далее получаем:
далее получаем:
![]()
Сравнивая коэффициенты при соответствующих тригонометрических функциях справа и слева, получаем систему алгебраических уравнений для определения состояния А и В
Решая эту систему получаем следующие выражения:
 А = 0.04 м;
А = 0.04 м;
![]() В = - 0.008 м;
В = - 0.008 м;
Общее решение дифференциального уравнения:

Постоянные интегрирования ![]() определяем из начальных условий, при t = 0 имеем:
определяем из начальных условий, при t = 0 имеем:
Решая эту систему получаем:

![]()
![]()
![]()
1.3 Определение реакций внешних и внутренних связей
Для решения этой задачи расчленим механизм на отдельные части и изобразим расчетные схемы отдельно для каждого тела. Определение реакций связей проведем с помощью теоремы об изменении кинетического момента и теоремы об изменении количества движения.
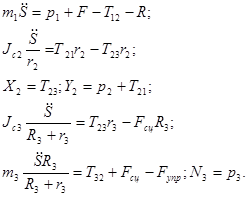
Тело №1: ![]()
![]()
Тело №2: 
Тело №3: 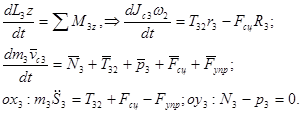
![]()
C учётом кинематических соотношений (1.7) полученную систему уравнений преобразуем к вид:
Решая эту систему, получаем выражение для определения реакций связей:
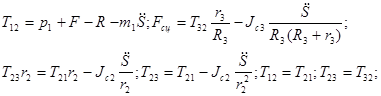
![]()
2. Построение алгоритма вычислений :
(2.1) Исходные данные:
![]()
(2.2) Вычисление констант:
![]()
![]()
![]()
![]()
(2.3) Задание начального времени: t=0;
(2.4) Вычисление значений функций в момент времени t=0;
![]()
![]()
(2.5) Вычисление реакций связей:
![]()
![]()
(2.6) Вывод на печать значений искомых функций в момент времени t;
(2.7) Определение значения времени на следующем шаге ![]()
(2.8) Проверка условия окончания цикла: ![]()
(2.9) Возврат к пункту (2.4).
3. Применение принципа Даламбера-Лагранжа и уравнения Лагранжа второго рода
3.1 Применение принципа Даламбера-Лагранжа
Общее уравнение динамике системы есть математическое выражение принципа Даламбера-Лагранжа.
сумма элементарных работ всех активных сил на возможном перемещении системы;
![]() сумма элементарных работ всех инерции сил на возможном перемещении системы.
сумма элементарных работ всех инерции сил на возможном перемещении системы.
Изобразим на рисунке активные силы и силы инерции (рис.3)
Идеальные связи: ![]()
Не учитываем, и не отображаем на расчетной схеме, поскольку по определению работа их реакций на любом возможном перемещении системы равна 0.
Сообщим системе возможное перемещение.
![]()
Вычисляя последовательно элементарные работы активных сил и суммируя получим:
(2) ![]()
Найдём возможную работу сил инерции:
![]()
Запишем выражение для главных векторов и главных моментов сил инерции;
Используя кинематические соотношения (1.7), определим:
Теперь возможную работу сил инерции можно преобразовать к виду:
![]()
(3) ![]()
Далее подставляя выражения (2) и (3) в (1), т.е в общее уравнение динамики получаем
![]()
Поделив это уравнение на ![]() , получим дифференциальное уравнение вынужденных колебаний системы:
, получим дифференциальное уравнение вынужденных колебаний системы:

Анализ результатов
В данной курсовой работе мы исследовали динамическое поведение механической системы с использованием основных теорем и уравнений теоретической механики. Дифференциальное уравнение движения механической системы получено тремя способами. Во всех случаях коэффициенты ![]() , n, k получились одинаковыми и совпали с компьютерной распечаткой, что говорит об их правильности. В процессе решения дифференциального уравнения данной механической системы были получены законы движения первого груза, его скорость и ускорение в зависимости от времени t. На основании этих зависимостей были определены законы изменения всех остальных характеристик механической системы, в том числе и реакции связей.
, n, k получились одинаковыми и совпали с компьютерной распечаткой, что говорит об их правильности. В процессе решения дифференциального уравнения данной механической системы были получены законы движения первого груза, его скорость и ускорение в зависимости от времени t. На основании этих зависимостей были определены законы изменения всех остальных характеристик механической системы, в том числе и реакции связей.
Похожие работы
-
Дифференциальное уравнение относительного движения механической системы
Изучение теоретической механики как одной из фундаментальных физико-математических дисциплин. Теоретическая механика, как часть естествознания. Поведение системы в условиях стабильного закона движения, в конкретных условиях и в условиях малых колебаний.
-
Параметры точек твердого плоскодвижущегося тела
Задание К-5-27. Определение скоростей и ускорений точек твердого тела при плоском движении ώOA ώI ξOA 15 cm 60 cm/c 30 cm/c2 Условие скорости звена:
-
Физика. Билеты к экзамену за 9 класс
Физика 9 кл. Бровкиной Билет №1 1. Механическое движение. Система отсчета. Материальная точка. Траектория. Путь и перемещение материальной точки. 2. Лабораторная работа. Определение коэффициента трения скольжения.
-
Исследование релейно контакторной схемы управления ЭП с АД и динамическое торможение
Лабораторная работа №5 Исследование релейно-контакторной схемы управления ЭП с АД и динамическое торможение Цель работы: Практически изучить схему динамического торможения АД с короткозамкнутым ротором в функции времени.
-
Исследование релейно-контакторной схемы управления электроприводом с АД и динамическим торможением
Лабораторная работа №5 Исследование релейно-контакторной схемы управления электроприводом с АД и динамическим торможением Цель работы: Практически изучить схему динамического торможения АД с к.з. ротором в функции времени.
-
Исследование движения механической системы с двумя степенями свободы
Министерство образования РФ Самарский Государственный Аэрокосмический Университет имени академика С.П. Королева (Тольяттинский филиал) Кафедра математики и механики
-
Определение величин по теоретической механике
Определение поступательного и вращательного движения твердого тела. Кинематический анализ плоского механизма. Применение теоремы об изменении кинетической энергии к изучению движения механической системы. Применение общего управления динамики к движению.
-
Центр скоростей и ускорение плоскодвижущегося шатуна
Расчет мгновенного центра скоростей и центростремительного ускорения шатуна, совершающего плоское движение. Определение реакции опор для закрепления бруса, при котором Ма имеет наименьшее значение. Нахождение модуля ускорения и модуля скорости точки.
-
Исследование движения механической системы с использованием общих теорем и принципов динамики
МИНИСТЕРСТВО СЕЛЬСКОГО ХОЗЯЙСТВА РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО РЫБОЛОВСТВУ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
-
Решение задач по теоретической механике
Определение величины сил, приложенных к отдельным участкам конструкции, силы трения, нормальной реакции. Вычисление положения точки на траектории в рассматриваемый момент времени. Применение теоремы об изменении количества движения к механической системе.