Название: Теорії лінійних одноконтурних автоматичних систем регулювання
Вид работы: курсовая работа
Рубрика: Коммуникации и связь
Размер файла: 113.67 Kb
Скачать файл: referat.me-168869.docx
Краткое описание работы: Визначення перехідної функції об’єкта керування. Побудова кривої розгону об’єкта. Обчислення і побудова комплексно-частотної характеристики (КЧХ) об’єкта. Побудова КЧХ розімкнутої автоматичної системи регулювання. Запас сталості за модулем і фазою.
Теорії лінійних одноконтурних автоматичних систем регулювання
Міністерство транспорту та зв’язку України
Одеська національна академія зв’язку ім. О.С. Попова
Кафедра інформатизації та управління
КУРСОВА РОБОТА
з дисципліни “Теорія автоматичного керування ”
Виконала:
студентка 3-го курсу
групи КТ-3.09
Лузіна Т.А.
варіант №14
Керівники:
Кушнiр I. C.
Харабет О. М.
Одеса 2010
Зміст
1. Визначення перехідної функції об’єкта керування
2. Побудова кривої розгону об’єкту
3. Обчислення і побудова комплексно-частотної характеристики (КЧХ) об’єкта
4. Побудова межі cтiйкостi АСР
5. Обчислення оптимальних параметрів регулятора
6. Побудова КЧХ розімкнутої автоматичної системи регулювання.
Визначення запасу сталості за модулем і фазою
7. Вибір налаштувань ПІ-регулятора за методикою Л.І. Кона
8. Вибір налаштувань ПІ - регулятора за методикою А.П. Копеловича
Висновки
Список літератури
Вихідні дані:
KM =3.2 од.
T1 =45 c
T2 =11 c
t = 7 c
ΔN=50 од. збурення
m=0,37 кореневий показник коливальності.
1. Визначення перехідної функції об’єкта керування
Побудова кривої розгону.
Математичний опис діючого об’єкта керування в АСР у вигляді диференційного рівняння:
![]()
Розв’язання цього рівняння зручно виконувати зі застосовуванням способу операторного перетворення Лапласа. Відповідно до цього передатна функція об’єкта по каналу збурення:

Для переходу від зображення вихідної функції до її оригіналу ∆x (t) можна застосовувати метод О. Хевісайда. Формула Хевісайда:

Якщо корені характеристичного рівняння p2 , p3 - речовинні і уявні, розв’язання:
![]()
2. Побудова кривої розгону об’єкту
Km: =3.2
τ: =7
T1: =45 T2: =11 m: =0.37 ΔN: =50
P2: = - 0.024 P3: = - 0.348

Крива розгону ПІ - регулятора наведена на рис.1:
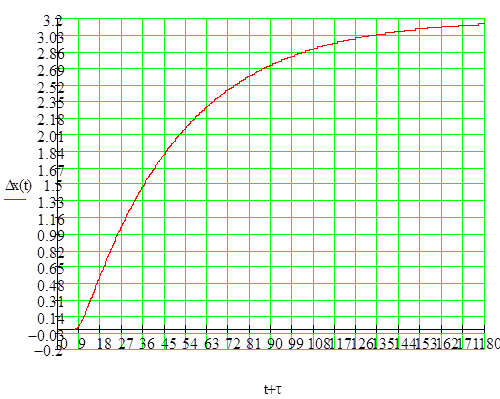
Рисунок 1. Крива розгону на виході об’єкта.
3. Обчислення і побудова комплексно-частотної характеристики (КЧХ) об’єкта
Перевід задачі в частотну область здійснюється шляхом формальної заміни повною комплексною незалежною змінною s її чисто комплексною частиною ωj:

Дійсну і уявну частини КЧХ об’єкта по каналу регулювання можна визначити формулами:

Для побудови КЧХ об’єкта без запізнення використовувались формули

На рис.2. наведені КЧХ об’єкту без запізнення та з запізненням.
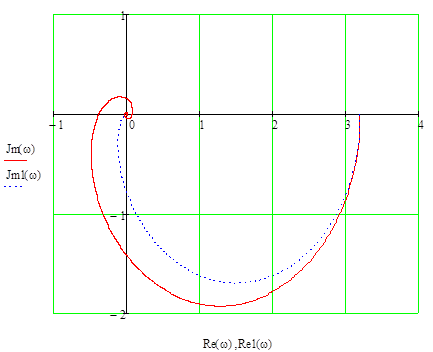
Рисунок 2. - КЧХ об’єкту:
a) з запізненням (суцільний); б) без запізнення (пунктирний).
4. Побудова межі cтiйкостi АСР
Вирази для визначення настройок, відповідних межі сталості АСР:
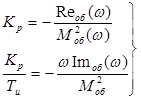
Кожному значенню колової частоти відповідає пара значень параметрів настройок Кр і Кр/ Тu . Для даної АСР межа області сталості повинна розташовуватися у верхній площині параметрів.
Після побудови межі стiйкості визначаємо значення точки максимуму:
Межа стiйкості наведена на рис.3.
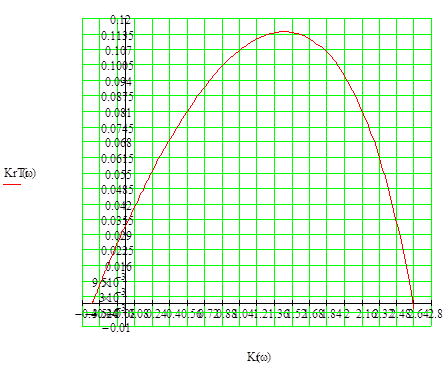
![]() Рисунок 3. Побудова межі стiйкості АСР.
Рисунок 3. Побудова межі стiйкості АСР.
5. Обчислення оптимальних параметрів регулятора
Визначенню підлягають налаштування, що найкраще забезпечують заданий ступінь коливальності для ПП або ступінь загасання ПП:
![]()
![]()
![]()
![]()
Виконавши формальну заміну s на ![]() одержимо
одержимо
![]()
Для побудови розширеної КЧХ об’єкту: за дійсною та фіктивною частинами.

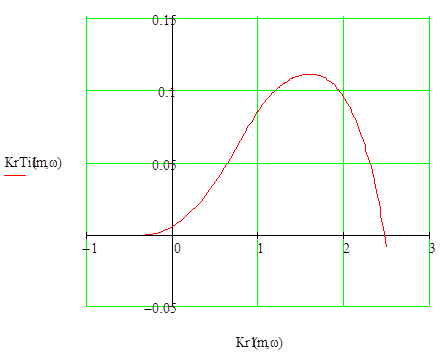
Рисунок 4. - РКЧХ об’єкту при m=0,37
З графіку ми бачимо, що оптимальними настройками для даної АСР буде Кр=1.6;
Кр/Тu=0.12;
Тu=13.3с.
6. Побудова КЧХ розімкнутої автоматичної системи регулювання.
Визначення запасу сталості за модулем і фазою
Як і раніше, дана КЧХ - Wpc (![]() ) вираховується і будується за дійсною і фіктивною складовими.
) вираховується і будується за дійсною і фіктивною складовими.
![]()
Або з урахуванням КЧХ ПІ-регулятора.
![]()
Звідси отримуємо:
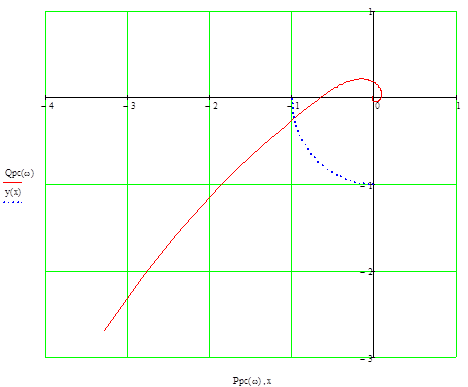
Рисунок 5- Побудова КЧХ розімкненої системи АСР
З цього графіку знайдені параметри С та g - запаси сталості за модулем та фазою відповідно:
С=0.3; γ = o .
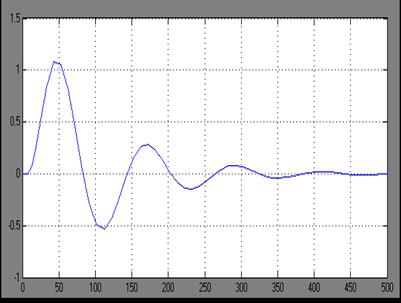
Рисунок 6 - Графік перехідного процесу регулювання в АСР (налаштування регулятора знайденi за методом РКЧХ).
З рисунку 5 знайдемо:
ΔХ1=1.1;
ΔХ3=0.25;
Tp=400c;
Ψ=0.77;
γ= 0 ;
C=0.3;
Всi розрахунки зведенi до таблицi 1.
7. Вибір налаштувань ПІ-регулятора за методикою Л.І. Кона
Відокремлюваною особливістю методики є апроксимація складного об’єкта ланцюгом простих інерційних ланок 1-го порядку.
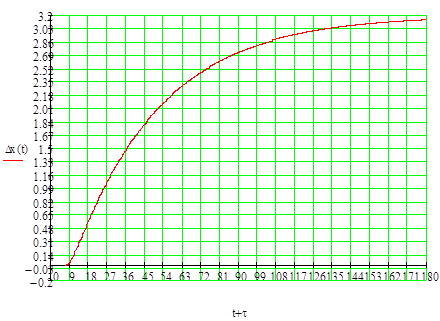
Рисунок 7. Обробка кривої розгону об’єкту регулювання
Та=56с
τ =7с
а= τ / Та =0.12
m=0.37
q=2
Знайдемо із показників с=2.12 і к= 1.09 значення Кр і Тu:
Тu=7*2.12=14.84с, Кр=1.09/3.2=0.34.
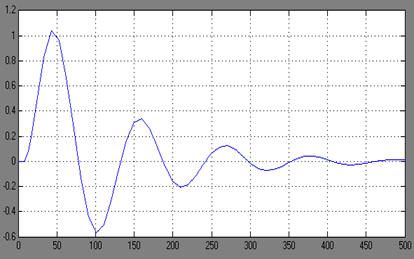
Рисунок 8. - Графік перехідного процесу регулювання в АСР (налаштування регулятора знайденi за методом Кона)
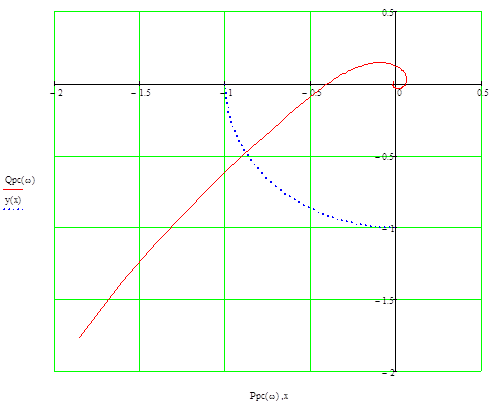
Рисунок 9- Побудова КЧХ розімкненої системи АСР
З рисунку 8 знайдемо:
ΔХ1=1.1;
ΔХ3=0.35;
Tp=400c;
Ψ=0.68;
γ= 0 ;
C=0.6
m=0.18
Всi розрахунки зведенi до таблицi 1.
8. Вибір налаштувань ПІ - регулятора за методикою А.П. Копеловича
Методика Копеловича дає можливість задовольнити вимогу до якості ПП регулювання шляхом попереднього вибору типу регулятора. В практиці часто бувають обмежені максимальні динамічні відхилення регульованих величин від заданого значення ![]() і час регулювання tP
≤ tPдоп
і час регулювання tP
≤ tPдоп
З нормограмми для вибору налаштувань ПI та- регулятора з рис.3 обираємо свої параметри:
t/Тu =0.12;
Знайдемо, що
Kp=2.18;
Тu =24.5c.
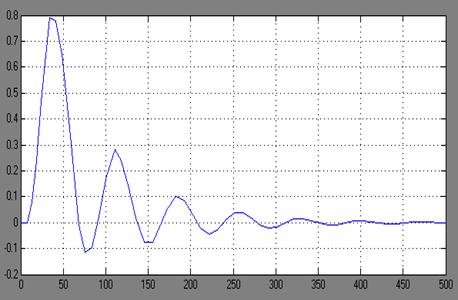
Рисунок 10. - Графік перехідного процесу регулювання в АСР (налаштування регулятора знайденi за методом Копеловича)
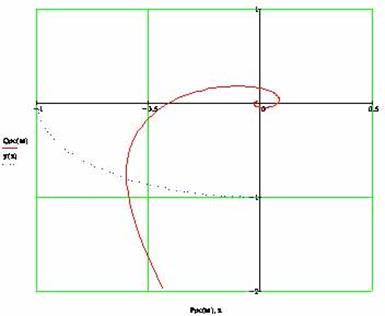
Рисунок 11 - Побудова КЧХ розімкненої системи АСР
З рисунку 10 знайдемо:
ΔХ1 = 0.8;
ΔХ3 = 0.3;
Tp = 400c;
Ψ = 0.63;
γ =;
C = 0.6;
m = 0.16;
Всi розрахунки зведенi до таблицi 1.
Таблиця 1. - Зведена таблиця основних результатів курсової роботи
Спосіб визначення настройок |
Кр | Тu | m | ΔХ1 | ΔХ3 | C | γ | Ψ | Tp |
| Метод розширеної КЧХ | 1.6 | 13.3 | 0.37 | 1.1 | 0.25 | 0.3 |
0.77 | 400 | |
Метод Кона |
0.34 | 14.84 | 0.18 | 1.1 | 0.35 | 0.6 | 0.91 | 400 | |
| Метод Копеловича | 2.18 | 24.5 | 0.16 | 0.8 | 0.3 | 0.6 | 0.63 | 450 |
Висновки
При виконанні курсової роботи були закріплені одержанні знання з теорії лінійних одноконтурних автоматичних систем регулювання.
За результатами обчислення координат була побудована крива розгону об’єкта; обчислені координати і побудована КЧХ обיєкта з запізненням та без запізнення; побудована межа тривалості АСР в координатах КР - КР /Tи ; були визначені оптимальні настройки ПІ - регулятора різними методами; побудована КЧХ розімкненої АСР.
Порівнюючи налаштування, отримані за методиками Кона, Копеловича, з налаштуванням, отриманими з точки максимуму, зробили висновок:
метод Копеловича не досить точний, тому що в ньому застосовуються номограми, по яким визначалися налаштування, допускають допускають велику похибку (в тому числі через те, що в них використовується логарифмічна шкала). Перехідний процес при настройках, вибраних по методикам Кона, дає найбільш прийнятний результат ніж інші. Але ні один з методів не являється досить добрим, у кожного є свої переваги й недоліки, тому їх потрібно обирати в конкретній ситуації вже інженеру-наладчику АСР самостійно.
Список літератури
1. Методические указания и таблицы для выбора настроек ПИ- и П - регуляторов в одноконтурных системах регулирования тепловых объектов с запаздыванием. / Л.И. Кон. - Одесса: ОПИ, 1975
2. Климовицкий М.Д., Копелович А.П. Автоматический контроль и регулирование в чёрной металлургии: Справочник. - М.: Металлургия, 1967. - с.372-378; 417-425.
3. Попович М.Г., Ковальчук О.В. Теорія автоматичного керування: Підручник для вищих технічних закладів освіти. - К.: Либідь, 1997.
Похожие работы
-
Система прямого регулювання тиску газу з І-регулятором
Аналіз і синтез лінійної неперервної САК. Визначення стійкості системи по критерію Гурвіца. Побудова логарифмічної частотної характеристики САК. Визначення періоду дискретизації імпульсного елемента та передаточної функції розімкнутої та замкнутої ДСАК.
-
Дистанційна слідкуюча система на сельсинах
Опис роботи, аналіз та синтез лінійної неперервної системи автоматичного керування. Особливості її структурної схеми, виконуваних функцій, критерії стійкості та її запаси. Аналіз дискретної системи автокерування: визначення її показників, оцінка якості.
-
Типові вхідні сигнали
Характеристика сутності типових вхідних сигналів, які використовуються для теоретичного й експериментального дослідження автоматичних систем. Східчаста, імпульсна, лінійно-зростаюча вхідна дія. Білий шум, імпульсна перехідна функція. Підсилювальна ланка.
-
Розкладання в ряд Фур'є несинусоїдальної періодичної функції напруги та дослідження її впливу на лінійне коло
Пошук повного вхідного опору ланцюга щодо затисків. АЧХ і ФЧХ комплексного коефіцієнта передачі по напрузі. Розкладання в ряд Фур'є несинусоїдальної періодичної функції. Побудова лінійчатого амплітудного і фазового спектру вхідної і вихідної напруги.
-
Одноосьовий гіроскопічний стабілізатор
Опис роботи системи автоматичного керування (САК). Аналіз лінійної та дискретної САК. Визначення стійкості системи по критерію Гурвіца. Побудова амплітудно-фазової та логарифмічної частотної характеристики. Моделювання в програмному модулі Simulink.
-
Цифрова обробка сигналів
Знаходження згортки послідовностей способами прямого обчисленням і з використанням z-перетворення. Побудова графіків за результатами обчислення з використанням програми MathCAD. Визначення системної функції фільтра, імпульсної та частотної характеристик.
-
Поняття та класифікація систем радіоавтоматики
Автоматична система як сукупність пристроїв, що забезпечують процес керування; основні елементи: об'єкт, керуючий пристрій. Класифікація систем радіоавтоматики, математичний опис, диференціальні рівняння елементів АС, статичні і динамічні властивості.
-
Дослідження розбавлювача димових газів по каналу регулювання "витрата повітря – температура димових газів"
Динаміка об'єкта керування (розбавлювача димових газів), технологічний процес. Робота об'єкта в режимі нормальної експлуатації, методи дослідження і вид вхідного впливу. Розрахунок оптимальних настроювань регулятора. Розрахунок метрологічних показників.
-
Розробка лінійних систем автоматичного управління (САУ) з цифровою корегуючою ланкою
Розробка функціональної схеми цифрової слідкуючої системи. Складання передаточних функцій її елементів. Вибір виконавчого двигуна і підсилювача потужності. Розрахунок, побудова та моделювання послідовної безперервної корегуючої ланки методом ЛАЧХ.
-
Передатні функції імпульсних автоматичних систем та оцінка їх якості
Дослідження динамічних властивостей імпульсних автоматичних систем. Поняття й визначення передатної функції розімкнутої імпульсної системи. Оцінка стійкості системи, складання її характеристичних рівнянь. Якість процесів у лінійних імпульсних системах.