Название: Коррекция систем автоматического управления
Вид работы: контрольная работа
Рубрика: Коммуникации и связь
Размер файла: 61.43 Kb
Скачать файл: referat.me-170832.docx
Краткое описание работы: Контрольная работа Предмет: Теория автоматического управления Тема: " Коррекция систем автоматического управления" 1. Коррекция: общие положения
Коррекция систем автоматического управления
Контрольная работа
Предмет: Теория автоматического управления
Тема: " Коррекция систем автоматического управления"
1. Коррекция: общие положения
Любая система должна быть устойчивой и удовлетворять требованиям по точности и качеству переходного процесса.
Существует два пути достижения этих целей:
1. Изменение варьируемых параметров системы (параметры регулятора), но требования по качеству и устойчивости часто являются противоречивыми, например, увеличение коэффициента усиления системы повышает точность системы, но при этом система может стать неустойчивой.
2. Изменение структуры системы, путем введения дополнительных устройств, называемых корректирующими.
При коррекции систем управления решается задача синтеза корректирующего устройства, которая заключается в определении структуры и параметров корректирующего устройства, включение которого делает систему удовлетворяющей поставленным к ней требованиям.
2. Корректирующие устройства
Корректирующие устройства чаще всего представляют собой пассивные четырехполюсники, состоящие из RC – элементов. Эффективность корректирующих устройств определяется правильным выбором их параметров (ki , Ti ). Если сигналы электрические используются RC – цепи, если не электрические, то используются их механические аналоги (рис. 1а).
Корректирующие устройства можно классифицировать:
1. По видам: последовательные и параллельные.
2. По типам: дифференцирующие, интегрирующие и интегро-диффе-ренцирующие.
Последовательная коррекция. При последовательной коррекции корректирующее устройство включается последовательно в контур управления (рис. 1б).
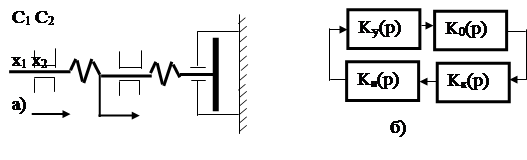 |
Рис. 1
При этом передаточная функция разомкнутой системы, независимо от места включения корректирующего устройства равна
![]()
Так как корректирующее устройство чаще всего представляет собой пассивный RC –фильтр, то ставить его в цепь, где передаются большие мощности, не рационально с точки зрения энергетических затрат, так как при этом необходимы дорогостоящие корректирующие устройства (большие потери мощности).
Так как ОУ - мощное устройство, УУ - менее мощное устройство, ИУ - маломощное устройство, то обычно корректирующие устройства включаются на входе системы либо выходе измерительного устройства.
Параллельная коррекция. При параллельной коррекции, корректирующее устройство может быть включено параллельно любому звену или соединению звеньев (рис. 2а).
При этом передаточная функция скорректированной системы зависит от места включения корректирующего устройства. Синтез параллельных корректирующих устройств сложнее, чем последовательных.
Рассмотрим различные типы корректирующих устройств и их характеристики.
Дифференцирующее корректирующее устройство. Схема дифференцирующего корректирующего устройства приведена на рис. 2б.
 |
 |
|
Передаточная функция дифференцирующего корректирующего устройства имеет вид

где 
k -коэффициент ослабления контура.
Частотные характеристики дифференцирующей цепи, приведены в таблице 1.
Таблица 1
АФХ |
Логарифмические характеристики |
||
|
Работа дифференцирующего корректирующего устройства. Введение дифференцирующего корректирующего устройства уменьшает коэффициент усиления на низких частотах, что уменьшает точность системы, но увеличивает запас устойчивости.
За счет положительного фазового сдвига, вносимого контуром, увеличивается частота среза, а значит, уменьшается время регулирования, т. е. повышается быстродействие системы, но расширение полосы пропускания увеличивает действие помех.
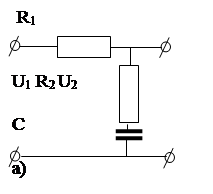
Интегрирующее корректирующее устройство. Схема интегрирующего
корректирующего устройства приведена на рис. 3а.
На схеме рис. 5 приняты следующие обозначения
 .
.
Передаточная функция интегрирующей цепи имеет вид

Условие, при котором данная цепь будет обладать интегрирующими свойствами T3 > T2 . Частотные характеристики интегрирующей корректирующей цепи приведены в таблице 2.
Таблица 2
АФХ |
Логарифмические характеристики |
||
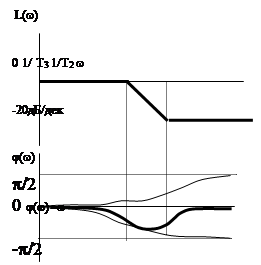  
|
Работа дифференцирующего корректирующего устройства. Введение интегрирующего корректирующего устройства уменьшает коэффициент усиления на высоких частотах, что уменьшает действие помех, но ухудшает переходный процесс.
Интегро-дифференцирующее корректирующее устройство. Схема интегро-дифференцирующего корректирующего устройства приведена на рис. 3б
 |
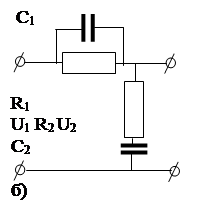 |
Рис. 3
Для интегро-дифференцирующего контура, обычно С2 > С1 . В области низких частот С1 можно пренебречь, и контур работает как интегрирующий, а в области высоких частот С2 можно пренебречь, и контур работает как дифференцирующий.
(В ТАУ НЧ 0 £ w £ 5 с-1 ; СЧ 5 £ w £ 50 с-1 ; ВЧ 50 £ w £ ¥ с-1 ).
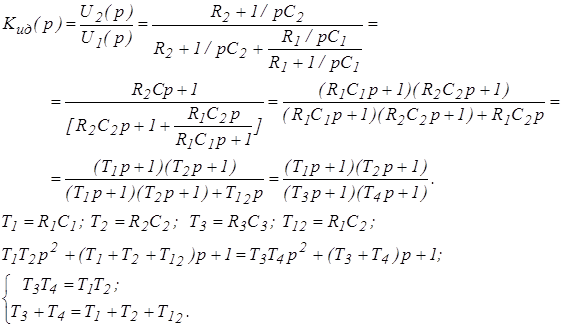
Передаточная функция цепи, представленной на рис. 3б имеет вид
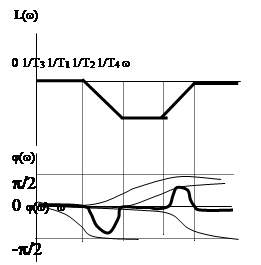
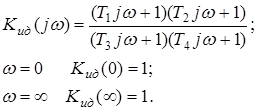
Частотные характеристики цепи, приведены в таблице 3.
Таблица 3
АФХ |
Логарифмические характеристики |
||
|
Работа интегро–дифференцирующего корректирующего устройства.
Интегро-дифференцирующее корректирующее устройство в области низких частот работает как интегрирующее, а в области высоких частот как дифференцирующее, поэтому оно совмещает достоинства интегрирующего и дифференцирующего устройств.
За счет уменьшения коэффициента усиления на низких частотах увеличивается запас устойчивости.
За счет положительного фазового сдвига, вносимого контуром, увеличивается частота среза, а значит, уменьшается время регулирования, т. е. повышается быстродействие системы.
3. Методы синтеза последовательных корректирующих устройств
При расчете параметров корректирующих устройств можно использовать любой из методов определения качества, но наиболее часто используют частотные методы, в частности, логарифмические частотные характеристики.
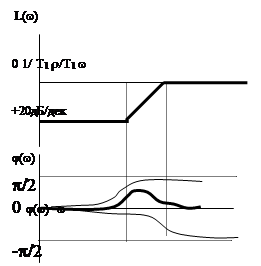
Рассмотрим, как по виду ЛАЧХ можно судить о качестве переходного процесса (рис. 4).
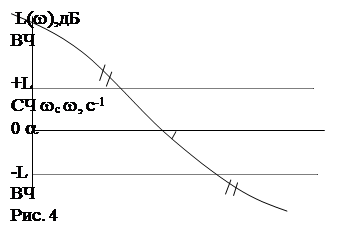 |
Характеристику разбивают на три части: НЧ - определяет статику; СЧ - определяет динамику; ВЧ – не играет роли.
Точка пересечения ЛАЧХ с осью абсцисс характеризует частоту среза - w с .
1. Время переходного процесса является функцией частоты среза tп = f( w с ); tп = c/ w с .
2. Число перерегулирований является функцией угла пересечения ЛАЧХ оси абсцисс N = f( a ) . Обычно N = 2¸3, при этом a »-20 дБ/дек.
3. Величина перерегулирования является функцией запаса устойчивости по амплитуде – L . s % = f(L) . Обычно s % = 20¸30, при этом L »20 дБ.
4. Порядок синтеза последовательного корректирующего устройства
Порядок синтеза последовательного корректирующего устройства рассмотрим на конкретном примере.
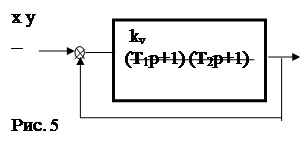
Пример 1. Дана система, схема которой приведена на рис. 5.
Пусть T1 = 1 c, T2 = 0,1 c, kv = 10 c-1 . Необходимо синтезировать последовательное корректирующее устройство, обеспечивающее следующие показатели качества:
1. Величина статической ошибки e с = 0.
2. Частота среза желаемой системы w сж = 1 с-1 .
3. Величина относительного перерегулирования s % = 20 ¸ 30.
4. Число перерегулирований N = 2 ¸ 3.
 |
Решение:
1. Строим ЛАЧХ заданной (реальной) системы (рис. 6).
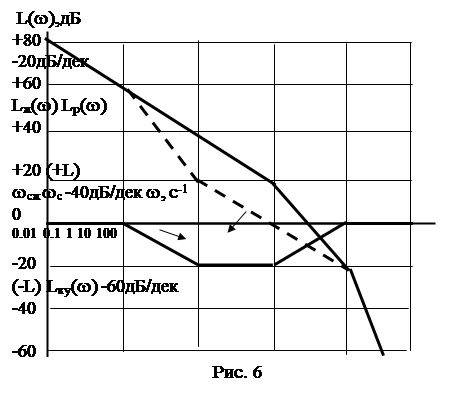 |
Строим ЛАЧХ желаемой системы исходя из следующего:
- для обеспечения требуемого времени переходного процесса ЛАЧХ желаемой системы должна пересекать ось абсцисс в точке w сж = 1с-1 .
-для обеспечения требуемого числа перерегулирований N = 2 ¸ 3 угол пересечения ЛАЧХ оси абсцисс должен равняться a »-20 дБ/дек.
- для обеспечения требуемой величины перерегулирования s % = 20¸30 запас устойчивости по амплитуде должен равняться L = ±20 дБ.
-для обеспечения требуемой величины статической ошибки e с = 0 логарифмическая характеристика желаемой системы в области низких частот должна иметь наклон –20 дБ/дек.
3. Сочленяем ЛАЧХ исходной Lр ( w ) и желаемой системы Lж ( w ) в области низких и высоких частот.
4. Вычитаем из ЛАЧХ исходной Lр ( w ) ЛАЧХ желаемой системы Lж ( w ), и получаем ЛАЧХ корректирующего устройства Lку ( w ).
5. По виду ЛАЧХ корректирующего устройства Lку ( w ) определяем его структуру и параметры.
Для рассматриваемого примера, корректирующее устройство представляет собой интегро-дифференцирующее звено, передаточная функция имеет вид:

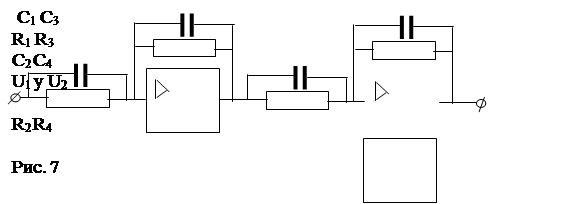
В зависимости от величин постоянных времени схемная реализация корректирующего устройства может быть различной:
- при 0 £ Ti £ 10 c-1 можно использовать пассивный RC –четырех-полюсник (рис. 3б);
- при 10 c-1 £ Ti £ 100 c-1 можно использовать активный фильтр (рис. 7);
- при Ti > 100 c-1 можно использовать цифровой фильтр.
 |
6. Записываем передаточную функцию скорректированной системы, строим переходный процесс и определяем показатели качества, если они удовлетворяют необходимым показателям, то процесс синтеза окончен.
5. Параллельные корректирующие устройства
Параллельные корректирующие устройства используются в виде местных, охватывающих отдельные элементы систем, и главных обратных связей. При этом в основном используются отрицательные обратные связи (ООС), повышающие устойчивость систем. Положительные обратные (ПОС) связи иногда используют как местную обратную связь для повышения коэффициента усиления на каком-либо участке системы.
Корректирующие обратные связи бывают гибкие и жесткие.
Жесткие ООС (ЖООС) действуют как в переходном, так и установившемся режиме. В качестве ЖООС используются следующие звенья:

Гибкие ООС (ГООС) действуют только в переходном режиме (пропускают высокочастотные составляющие сигнала и не пропускают низкочастотных).
В качестве ГООС используются следующие звенья:

Рассмотрим влияние обратной связи на параметры звеньев (к и Т ).
Пример 2. Для заданной системы (рис.8). Определить влияние ЖООС на параметры звеньев.
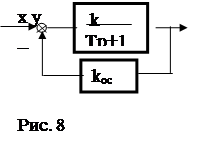 |
Решение: Передаточная функция замкнутой системы равна:
Охват инерционного звена ЖООС уменьшает постоянную времени звена и его коэффициент усиления.
Литература
1. Бронштейн И.Н., Семендяев К.Н. Справочник по математике для инженеров и учащихся вузов. — М.: Наука,1986.
2. Егоров А.И., Ким Дмитрий Теория автоматического управления. Том 1. Линейные системы. ФИЗМАТЛИТ®, 2007. – 312с.
3. Ким Д.П. Теория автоматического управления. Том 2. Многомерные, нелинейные, оптимальные и адаптивные системы. ФИЗМАТЛИТ®, 2004.
4. Никулин Е.А. Основы теории автоматического управления. Частотные методы анализа и синтеза систем. БХВ-Петербург, 2004. – 640с.
Похожие работы
-
Синтез последовательного корректирующего устройства и оценка показателей качества переходных
УО «БГУИР» Кафедра: Конструирования ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовой работе дисциплине: Теория автоматического управления Тема: Синтез последовательного корректирующего устройства и оценка показателей качества переходных процессов
-
Исследование частотных свойств линейных динамических звеньев
Министерство образования и науки Украины Донбасская Государственная Машиностроительная Академия Кафедра АПП Лабораторная работа по дисциплине "Теория автоматического управления"
-
Частотные характеристики дискретных систем управления
Предмет: Теория Автоматического Управления Тема: Частотные характеристики дискретных систем управления 1. Частотное представление дискретного сигнала
-
Исследование системы управления подводного аппарата по вертикальной координате
Характеристика управления подводного аппарата по разомкнутому контуру, путём подачи на двигатель постоянного напряжения. Статическая характеристика двигателя. Методы построения регулятора высоты подводного аппарата. Изучение релейной схемы управления.
-
Управление многомерными автоматическими системами
Характеристика структурной схемы объекта управления, особенности системы автоматического управления второго порядка. Составление уравнения объекта управления в векторной форме, порядок проверки системы на устойчивость, управляемость и наблюдаемость.
-
Анализ качества дискретных систем управления
Реферат Предмет: Теория автоматического управления Тема: Анализ качества дискретных систем управления Методы определения качества дискретных систем автоматического управления аналогичны методам определения качества непрерывных систем с учетом некоторых особенностей.
-
Повышение точности и устойчивости системы автоматического управления
Повышение точности системы путем увеличения порядка астатизма системы. Коррекция путем изменения коэффициента усиления системы. Коррекция с отставанием (применение интегрирующих звеньев) и опережением (применение дифференцирующих звеньев) по фазе.
-
Характеристика дискретных систем автоматического управления
Дискретные системы автоматического управления как системы, содержащие элементы, которые преобразуют непрерывный сигнал в дискретный. Импульсный элемент (ИЭ), его математическое описание. Цифровая система автоматического управления, методы ее расчета.
-
Расчет переходных процессов в дискретных системах управления
Соотношение между входным и выходным сигналом дискретной системы автоматического управления. Дискретное преобразование единичного воздействия, функция веса дискретной системы. Определение связи между переходной и функцией веса дискретной системы.
-
Прохождение случайного сигнала через дискретную и нелинейную системы
Соотношение для спектральных плотностей входного и выходного сигнала, дискретное преобразование Фурье. Статистические характеристики сигналов в дискретных системах. Дискретная спектральная плотность для спектральной плотности непрерывного сигнала.