Название: Разработка управляющей программы для станков с ЧПУ при контурной фрезерной обработке "пластины"
Вид работы: курсовая работа
Рубрика: Промышленность и производство
Размер файла: 103.29 Kb
Скачать файл: referat.me-299189.docx
Краткое описание работы: Область использования различных технических средств при изготовлении двух отверстий в пластине. Расчётно-технологическая карта для обработки правой части детали "Ось". Управляющая программы для станка с ЧПУ ВМ-12-500 при контурной фрезерной обработке.
Разработка управляющей программы для станков с ЧПУ при контурной фрезерной обработке "пластины"
Министерство образования и науки российской федерации
Федеральное агентство по образованию
Рыбинская государственная авиационная технологическая академия
им. П.А. Соловьева
Кафедра технологий авиационных двигателей и общего машиностроения и управления качеством
КУРСОВАЯ РАБОТА
по курсу
Основы автоматизации производственных процессов в машиностроении
Рыбинск 2006 г.
Содержание
1. Задание на курсовую работу
2. Определение области использования различных технологических средств при изготовлении двух отверстий в пластине
3. Разработка РТК для токарной обработки правой части оси на станке с ЧПУ
4. Разработка исходной программы для системы автоматизированной подготовки управляющих программ для станков с ЧПУ
Список использованной литературы
1. Задание на курсовую работу
На рисунке 1.1 показан узел, состоящий из двух деталей – пластины и оси. В пластине имеется технологическое отверстие Ø 10 для базирования и закрепления данной детали при контурной фрезерной обработке.

Рисунок 1.1 – Схема базирования и закрепления детали при фрезерной обработке
В ходе курсовой работы необходимо выполнить следующее:
1. Определить область использования различных технологических средств при изготовлении двух отверстий в пластине.
2. Разработать расчётно-технологическую карту (РТК) для правой части детали «ось».
3. Разработать исходную программу для системы автоматизированной подготовки управляющих программ на станках с ЧПУ при контурной фрезерной обработке «пластины».
Во всех заданиях принять ![]()
2. Задание 1. Определение области использования различных технологических средств при изготовлении двух отверстий в пластине
Определим рациональные области по основным затратам на изготовление одной детали: ![]() – затраты на зарплату;
– затраты на зарплату; ![]() – амортизация и обслуживание;
– амортизация и обслуживание; ![]() – затраты специальные для данной номенклатуры и, следовательно, зависящие от программы
– затраты специальные для данной номенклатуры и, следовательно, зависящие от программы ![]() .
.
Расчёт производим по следующим формулам:
где ![]() – коэффициент стабильности данной программы (
– коэффициент стабильности данной программы (![]() );
);
![]() – тариф часовой оплаты –
– тариф часовой оплаты – ![]() ;
;
![]() – коэффициент многостаночного обслуживания;
– коэффициент многостаночного обслуживания;
![]() – цена оборудования;
– цена оборудования;
![]() – годовой фонд времени в часах при 2-х сменной работе.
– годовой фонд времени в часах при 2-х сменной работе.
Сведения для расчётов и определения областей использования технологических схем в зависимости от годовой программы представим в таблице 2.1.
Таблица 2.1
Сведения для расчётов
| Оборудование | Сверлильный станок и кондуктор |
Станок с ЧПУ |
Сверлильный станок и многошпиндельная головка | Автомат с многошпиндельной головкой и автоматизированной загрузкой-выгрузкой |
| Вариант | А | Б | В | Г |
Кондуктор
|
управляющая программа |
Головка
|
 |
Спер – затраты на переналадку, равны:
![]()
Рекомендуется принимать
![]()
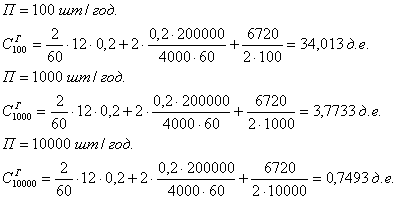
А) Расчёт стоимости детали при изготовлении её на сверлильном станке с кондуктором при различной программе выпуска (![]() ).
).
![]()
![]()
![]()
![]()
![]()
![]()
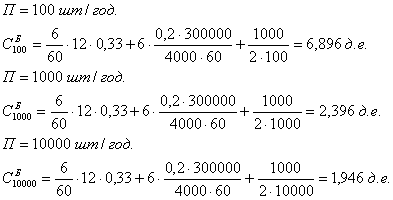
Б) Расчёт стоимости детали при изготовлении её на станке с ЧПУ при различной программе выпуска (![]() ).
).
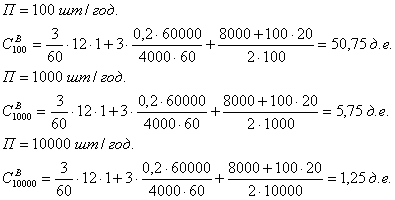
В) Расчёт стоимости детали при изготовлении её на сверлильном станке с многошпиндельной головкой при различной программе выпуска ![]() .
.
Г) Расчёт стоимости детали при изготовлении её на автомате с многошпиндельной головкой и автоматизированной загрузкой-выгрузкой при различной программе выпуска (![]() ).
).
На основании полученных в результате расчётов данных строим графики ![]() Из графиков видно, что при малой программе выпуска
Из графиков видно, что при малой программе выпуска ![]() , равной
, равной ![]() , наименьшая себестоимость у варианта Б (станок с ЧПУ), что объясняется наименьшими по сравнению с другими вариантами специальными затратами для данной номенклатуры
, наименьшая себестоимость у варианта Б (станок с ЧПУ), что объясняется наименьшими по сравнению с другими вариантами специальными затратами для данной номенклатуры ![]() , т. е. управляющая программа для станка с ЧПУ намного дешевле кондуктора для сверлильного станка (вариант А), многошпиндельной головки (вариант В), переналадки и многошпиндельной головки (вариант Г). При этой же программе наибольшая себестоимость у варианта В (сверлильный станок и многошпиндельная головка). В этом случае (вариант В), несмотря на то, что суммарные затраты на заработную плату
, т. е. управляющая программа для станка с ЧПУ намного дешевле кондуктора для сверлильного станка (вариант А), многошпиндельной головки (вариант В), переналадки и многошпиндельной головки (вариант Г). При этой же программе наибольшая себестоимость у варианта В (сверлильный станок и многошпиндельная головка). В этом случае (вариант В), несмотря на то, что суммарные затраты на заработную плату ![]() , амортизационные отчисления и обслуживание
, амортизационные отчисления и обслуживание ![]() намного меньше, чем у варианта Б, специальные затраты для данной номенклатуры
намного меньше, чем у варианта Б, специальные затраты для данной номенклатуры ![]() превышают себестоимость детали, выполненной на станке с ЧПУ, т. е. у многошпиндельной головки высокая стоимость.
превышают себестоимость детали, выполненной на станке с ЧПУ, т. е. у многошпиндельной головки высокая стоимость.
При увеличении программы выпуска ![]() от
от ![]() до
до ![]() себестоимость детали по всем вариантам резко снижается, что связано с уменьшением переменных затрат, т. е. затрат зависящих от
себестоимость детали по всем вариантам резко снижается, что связано с уменьшением переменных затрат, т. е. затрат зависящих от ![]() , с увеличением количества выпускаемых деталей их себестоимость уменьшается.
, с увеличением количества выпускаемых деталей их себестоимость уменьшается.
При дальнейшем увеличении программы выпуска ![]() от
от ![]() до
до ![]() снижение себестоимости продолжается, но уже более плавно, потому что при больших программах выпуска наибольший вклад в себестоимости вносят не специальные затраты для данной номенклатуры
снижение себестоимости продолжается, но уже более плавно, потому что при больших программах выпуска наибольший вклад в себестоимости вносят не специальные затраты для данной номенклатуры ![]() , а затраты на заработную плату рабочих
, а затраты на заработную плату рабочих ![]() и затраты на амортизационные отчисления и обслуживание
и затраты на амортизационные отчисления и обслуживание ![]() . Данные составляющие себестоимости являются наибольшими у варианта А (сверлильный станок и кондуктор), это объясняется наибольшим штучным временем (
. Данные составляющие себестоимости являются наибольшими у варианта А (сверлильный станок и кондуктор), это объясняется наибольшим штучным временем (![]() ) по сравнению с другими вариантами. Наименьшая себестоимость у деталей, изготовляемых на автомате с многошпиндельной головкой и автоматизированной загрузкой-выгрузкой (вариант Г), несмотря на то, что затраты на амортизацию и обслуживание у двух крайних вариантов (А и Г) приблизительно равны
) по сравнению с другими вариантами. Наименьшая себестоимость у деталей, изготовляемых на автомате с многошпиндельной головкой и автоматизированной загрузкой-выгрузкой (вариант Г), несмотря на то, что затраты на амортизацию и обслуживание у двух крайних вариантов (А и Г) приблизительно равны
![]() ,
,
затраты на заработную плату рабочих сильно разнятся
![]()
Это объясняется тем, что штучное время у варианта Г намного меньше, чем у варианта А (![]() и
и ![]() соответственно). Таким образом, время вносит более весомый вклад в себестоимость, по сравнению с ценой оборудования. Использование сверлильного станка автомата при большой программе выпуска более выгодно, чем простого станка, несмотря на то, что обычный сверлильный станок намного дешевле автомата.
соответственно). Таким образом, время вносит более весомый вклад в себестоимость, по сравнению с ценой оборудования. Использование сверлильного станка автомата при большой программе выпуска более выгодно, чем простого станка, несмотря на то, что обычный сверлильный станок намного дешевле автомата.

управляющий программа фрезерный обработка
3. Задание 2. Разработка РТК для токарной обработки правой части оси на станке с ЧПУ
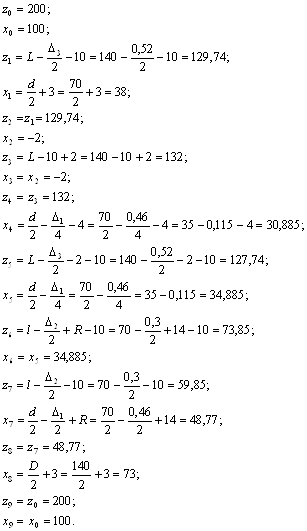
На эскизе изображается траектория инструмента с пронумерованными опорными точками. Опорные точки располагают в местах смены траектории режущего инструмента, изменения геометрического элемента траектории (прямая, дуга окружности и др.) или скорости подачи, например, переход с быстрого хода на рабочую подачу и наоборот. Для размеров, где не указаны допуски, рекомендуется их симметричное расположение.
В данном случае обработка на станке с ЧПУ будет вестись в абсолютной системе координат, когда координаты задаются от «0» станка.
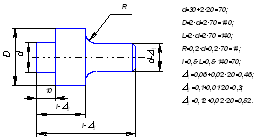
Рисунок 3.1 – Эскиз детали с указанными основными размерами
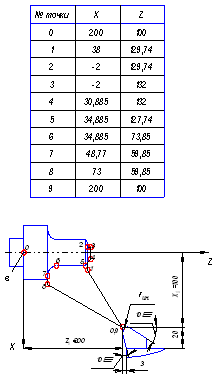
РТК включает таблицу опорных точек, рассчитанных с точностью до дискреты станка. Рекомендуемая дискрета – 0,01 мм.
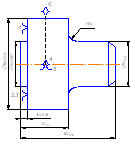
Рисунок 3.2 – Чертёж детали с размерами
Выбираем схему базирования детали в трёх кулачковом патроне и выполняем пересчёт операционных размеров.
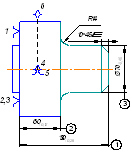
Рисунок 3.3 – Эскиз детали
4. Задание 3. Разработка исходной программы для системы автоматизированной подготовки управляющих программ для станков с ЧПУ
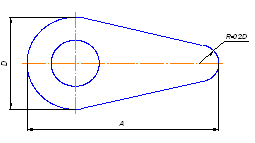
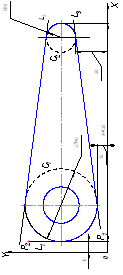
Рисунок 4.1 – Форма детали «пластина»
Планируется контурная однопроходная обработка, допуски симметричные. Исходная программа начинается словом part, заканчивается – fini. По структуре имеет две части – описание геометрических элементов и траектории движения инструмента.
Для описания геометрических элементов и траектории движения инструмента используются точки (![]() ), линии (
), линии (![]() ), окружности (
), окружности (![]() ).
).
Исходная программа
part– начало ИП;
P1 =10,0– точка, X = 10, Y = 0;
P2 =10,100– точка, X = 10, Y = 100;
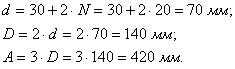
C1 =80,80,70– окружность с центром в точке с координатами X = 80,
Y =80 и радиусом R = 70;
C2 =402,48,28– окружность с центром в точке с координатами X = 402,
Y =48 и радиусом R = 28;
L1 =X,10– линия, параллельная оси Y, отсекает по X отрезок
10 мм;
L2 =C1 ,C2 ,LF,LF– прямая, касательная к дугам окружностей С1 и С2;
L3 =C2 ,C1 ,LF,LF– прямая, касательная к дугам окружностей С2 и С1;
CT/LF,10– включении коррекции на радиус инструмента, т. е.
центр фрезы (эквидистанта) находится слева от контура
на расстоянии 10 мм, если смотреть вслед уходящему
инструменту;
F/600– ускоренная подача;
FR/0,0– исходная точка;
K/P1 ,100,L1 ,C1 ,CW,L2 ,C2 ,CW,L3 ,C1 ,CW,L1 ,P2 – описание контура;
GH– возвращение в исходную точку;
fini– конец ИП.
Текст управляющей программы
N1 G01 X0000 Y80000 Z0000 F100
N2 G02 X98177 I80000 Y157908 J80000
N3 G01 X410634 Y85006
N4 G02 X403182 I402000 Y10018 J48000
N5 G01 X82488 Y0039
N6 G02 X0000 I80000 Y80000 J80000
N7 G01 Y100000
N8 M2
Выводы по работе
В результате выполнения данной курсовой работы на первом этапе была определена область использования различных технологических средств при изготовлении двух отверстий в пластине с построением графика зависимости стоимости механической обработки от заданной программы выпуска. На втором этапе была разработана расчётно-технологическая карта (РТК) для обработки правой части детали «Ось». На третьем этапе разработана исходная программа для системы автоматизированной подготовки управляющих программ на станках с ЧПУ при контурной фрезерной обработке «пластины», а также получена управляющая программа для станка с СЧПУ ВМ-12-500.
Список использованной литературы
1. Указания по выполнению курсовой работы по курсу «Основы автоматизации производственных процессов в машиностроении», Жогин А. С., Рыбинск, 2001.
Похожие работы
-
Система координат станка детали и инструмента
Система координат детали, станка, инструмента 1 Система координат детали. 2 Система координат станка. 3 Система координат инструмента. Система координат детали
-
Оптимальная последовательность обработки деталей на двух и четырех станках
Министерство Образования Российской Федерации Тольяттинский государственный университет Кафедра “Технология машиностроения” Отчет о практических работах
-
Гос. экзамен билеты. Машиностроение
Министерство образования и науки Республики Казахстан Машиностроительный факультет Кафедра «Технология машиностроения» Тема: Билеты государственного экзамена
-
Долбежные станки
Долбежные станки В долбежных станках резец движется возвратно-поступатель-но в вертикальной плоскости, перпендикулярной к поверхности стола. Характер движений в долбежных станках такой же, как и в поперечно-строгальных, поэтому их иногда называют вертикально-строгальными. Вертикальная компоновка позволяет обрабатывать на долбежных станках внутренние фасонные контуры, что на продольно- и поперечно-строгальных станках затруднено.
-
Технологический процесс изготовления детали "Валик терморегулятора"
Служебное назначение детали, технологический чертеж детали. Выбор и обоснование схем базирования и установки. Выбор оборудования, инструмента и оснастки. Расчет координат опорных точек траектории движения режущего инструмента. Назначение режимов резания.
-
Технико-экономическое обоснование производства
Создание токарных многоцелевых станков. Оснащение шпинделя станка приводом углового позиционирования (привод полярной координаты С) с блоком управления и приводом вращения инструмента. Два способа передачи вращения на инструмент. Устройство станка.
-
Программирование роботов робототехнических комплексов (РТК) механообработки
Разработка алгоритма функционирования управляющей программы для промышленных роботов, его особенности и порядок реализации. Состав типового многостаночного РТК. Примеры РТК механообработки и других сфер машиностроения, их функциональная нагрузка.
-
Автоматическое технологическое оборудование (АТО). Системы управления АТО
Станки с числовым программным управлением, особенности конструкции и работы. Классификация станков по степени универсальности, по габаритным размерам и массе, по точности. Системы управления АТО, эволюция технологии числового программного управления.
-
Проектирование технологического процесса механической обработки детали
Федеральное агентство по образованию РФ ВОСТОЧНО-СИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра МТОМ Расчетно-графическая работа №4.
-
Обозначение осей координат и направлений перемещений исполнительных органов на схемах станков с числовым программным управлением (ЧПУ)
Стандартная система координат станка с числовым программным управлением. Направления стандартной системы координат различных видов станков. Методика и условные обозначения осей координат и направлений перемещений на схемах агрегатных станков с ЧПУ.