Название: Расчет алгоритма управления АСУ
Вид работы: контрольная работа
Рубрика: Промышленность и производство
Размер файла: 583.54 Kb
Скачать файл: referat.me-300155.docx
Краткое описание работы: Кривая разгона. Динамические параметры и математическое описание кривой разгона. Алгоритм управления. Выбор переходного процесса и настройки параметров алгоритмов управления АСУ. Регулирование в программе SIMULINC. Оптимизация переходного процесса.
Расчет алгоритма управления АСУ
Министерство Российской Федерации
Иркутский Государственный Технический Университет
Кафедра автоматизации технологических процессов и производств
Курсовая работа
по Теории Автоматического Управления
Выполнил: ст. гр. АТП05-1
Проверил: Салов В.М.
Иркутск 2008г.
Задание:
1. Получить кривую разгона.
2. Получить динамические параметры кривой разгона.
3. Получить математическое описание из кривой разгона.
4. Выбрать алгоритм управления.
5. Выбор переходного процесса и настроить параметры алгоритмов управления.
6. Набрать схему регулирования в программе SIMULINC.
7. Выставить настроечные параметры и получить переходный процесс.
8. Оптимизировать переходный процесс вручную.
Выбираем объект:
-цветная металлургия,
-вращающиеся печи,
-загрузка-темература газов,
-линейная расходная характеристика.
Исходные данные:
Гидравлический модуль (0-10)…………………………………………….5
Номинальное значение хода РО (0-100)…………………………………50
Начальное значение пропускной способности (0,0-0,05)…………...0,025
С помощью данной программы снимем кривые разгона:
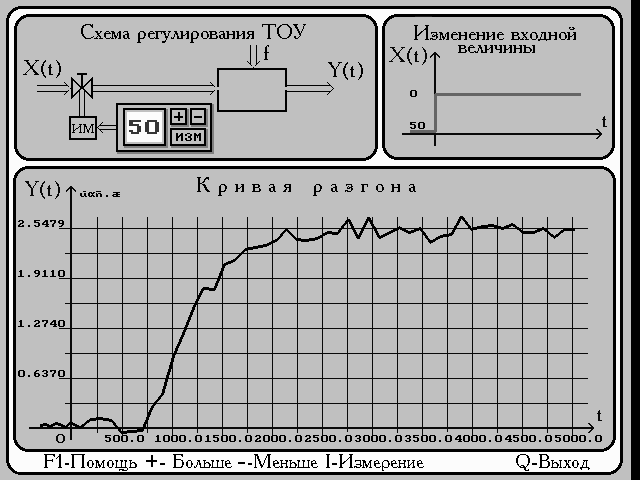
 |
Рисунок 1. Кривая разгона
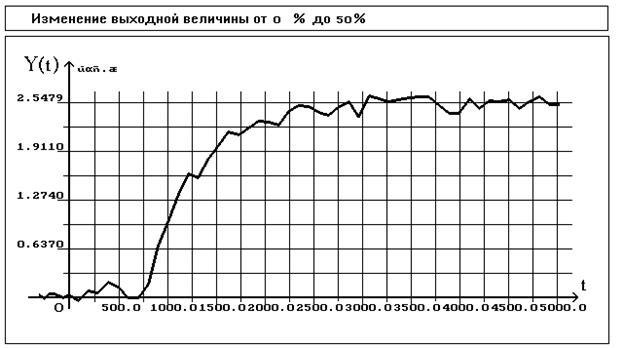 |
Рисунок 2. Кривая разгона.
Кривая разгона:
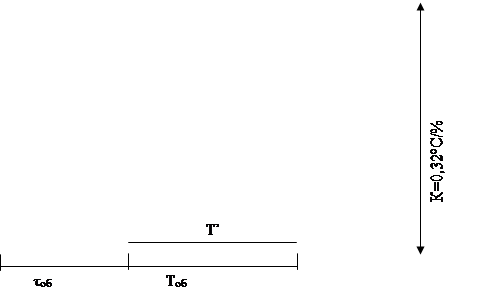

2. Динамические параметры кривой разгона:
Время запаздывания τоб =64
Постоянное время запаздывания Тоб =200
Коэффициент передачи Коб =0,32
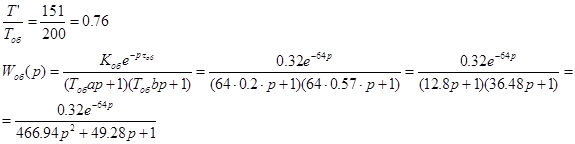
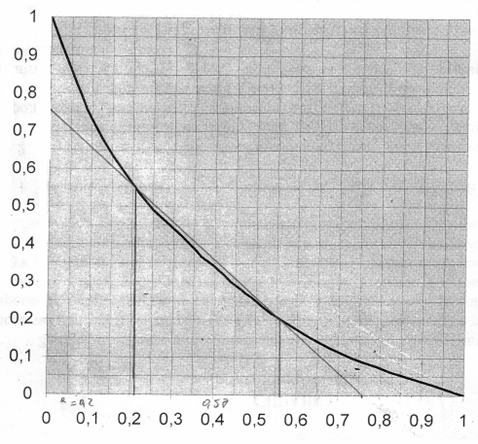
Т’=151
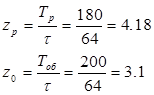
Время регулирования ![]()
Эквивалантные постоянные времени по кривой разгона
3. Математическое описание из кривой разгона:
а=0,2 сек.
b=0,57 сек.
Для обеспечения нормальной работы системы автоматического регулирования необходимо подобрать соответствующее автоматическое управляющее устройство с соответствующими параметрами.

4. Алгоритм управления: пропорционально интегрально дифференциальный (ПИД)
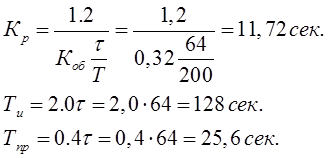
5. Настроечные параметры для ПИД регулятора Кр , Т u , Тпр
Выбираем переходный процесс: с 20% перерегулированием.
Настроечные параметры для процесса с 20% перерегулированием.
6. Набрать схему регулирования в программе SIMULINC.
7. Настроечные параметры выставлены.
8. Процесс оптимизирован.
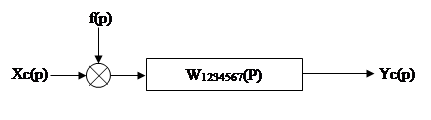
Задание 2
 |
 |
Задание 3
Определение устойчивости системы по критерию Рауса-Гурвица.
1. Азс (р)=р4 +2р3 +р2 +10р+20
Составляем главный определитель:
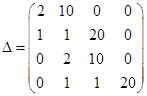
an =1>0
∆1 =2>0
∆2 =2-10=-8<0
Вывод: система не устойчива, т.к. уже второй определитель оказался <0
2. Азс (р)=р4 +3р3 +10р+5
Вывод: глядя на характеристическое уравнение можно сразу констатировать тот факт, что система не устойчивая, т.к. в характеристическом уравнении отсутствует один из членов уравнения
Задание 4
Вещественно частотная характеристика с положительной и отрицательной областью.
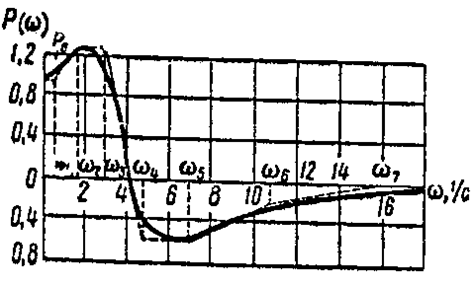
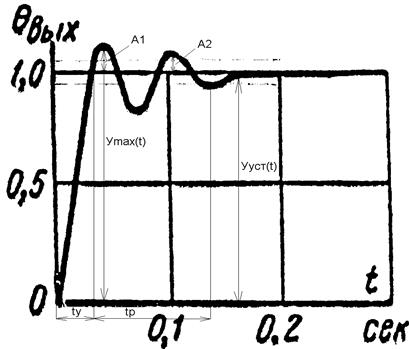
Оценка качества:
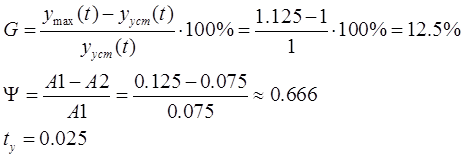
Перерегулирование.
Формула расчета: 
Переходный процесс в системе.
В зависимости от отношения τоб /Тоб выбираем тип АУУ.
Так как 1> τоб /Тоб = 0,685 >0,2 то выбираем непрерывный тип АУУ
Далее приближенно выбираем алгоритм управления из монограммы
Z(p) = t* p /τоб
Z(0) = Tоб /τоб
t* p – время работы системы, время регулирования.
Z(p) = 7/0,9 = 4,75
Z(0) = 923/735 = 1,26
Из диаграммы следует, что необходимо использовать ПИ регулятор.
Исходя из переходного процесса, по свойствам ОУ определяем, что процесс апериодический. По таблице характеристик статических объектов выбираем расчетные формулы для определения настроечных параметров для ПИ регулятора:
 ; Кр
= 0,468226
; Кр
= 0,468226
![]() ; ТИ
= 1764
; ТИ
= 1764
![]() ; ТПР
= 294
; ТПР
= 294
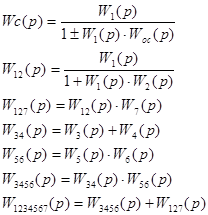
Передаточная функция ПИД алгоритма будет иметь вид:

Для данного переходного процесса расчитаем настроечные параметры:

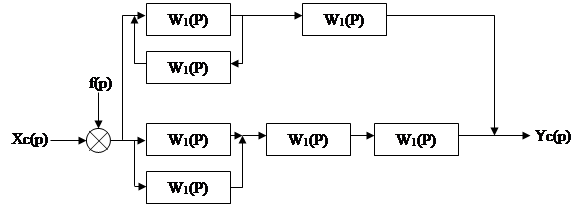
Для того что бы определить условия оптимальности, преобразуем данную схему так, что все возмущающие воздействия придут ко входу:
![]()
Для того, что бы схемы были адекватны и в 1-м и 2-м выражении были равнозначны необходимо, что бы передаточная функция фильтра i-го возмущения должна иметь определенную форму:
, тогда

необходимо подобрать такой фильтр, что бы свести на min влияние возмущения на полезный сигнал. Для этого осуществляем перенастройку регулятора
Похожие работы
-
Составление алгоритмов поиска неисправностей
Агентство по образованию и науки РФ Пензенский государственный университет Кафедра: "Информационно-измерительная техника" Курсовая работа
-
Параметрическая оптимизация систем управления
Многокритериальная параметрическая оптимизация систем управления К У Р С О В А Я Р А Б О Т А - по дисциплине: - «Проектирование систем управления» Задание
-
Определение оптимальных настроек ПИ-регулятора в АСР со звеном второго порядка с опозданием
Міністерство науки та освіти України Одеський національний політехнічний університет Енергетичний інститут Кафедра АТП Курсова робота з дисципліни: «Теорія автоматичного керування»
-
Расчёт настроек ПИ-регулятора методом РЧХ
Чебоксарский химико-технологический техникум КУРСОВАЯ РАБОТА Расчёт настроек ПИ-регулятора методом РЧХ Чебоксары, 2008 Содержание 1. Описание принципа действия замкнутой САР
-
Синтез системы автоматического управления процессом электрической очистки газа
Значение автоматизации для увеличения эффективности производства. Комплексная автоматизация процессов химической технологии. Регулятор, расчет его настроек и выбор типового переходного процесса. Система автоматического управления по программе SamSim.
-
Расчет одноконтурной автоматической системы регулирования температуры печи котельного агрегата
Управление гидравлическими и паровыми турбинами. Передаточная функция объекта управления. Расчет и построение частотных характеристик. Расчет оптимальных настроек регулятора температуры печи котельного агрегата методом расширенных частотных характеристик.
-
Расчет системы автоматического управления
Расчет и структурная схема передаточных функций разомкнутой и замкнутой системы автоматического управления (САУ) относительно входного воздействия. Формулы для мнимой и вещественной компоненты. Графики логарифмических амплитудной и фазовой характеристик.
-
Анализ качества работы системы автоматического регулирования в переходном и установившемся режимах
Амплитудно и фазо-частотная характеристика разомкнутой системы по передаточным функциям. Переходная характеристика системы по вещественной частотной характеристике замкнутой системы. Качество работы системы в переходном и установившемся режимах.
-
Автоматизация вельц печи для переработки цинковых кеков
Процесс вельцевания осуществляется в трубчатых вращающихся печах. Контроль и регулирование разряжения газов на входе в котел-утилизатор. Назначение и принцип действия преобразователя - дифференциального манометра для дистанционной передачи сигнала давлени
-
Система автоматического управления приводом протягивающего устройства стенда для изучения влияни
Федеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования «Курский государственный технический университет»