Название: Процесс работы реечного толкателя
Вид работы: контрольная работа
Рубрика: Промышленность и производство
Размер файла: 112.33 Kb
Скачать файл: referat.me-303273.docx
Краткое описание работы: Понятие и назначение реечного толкателя, его структура и основные элементы, принцип действия и возможности. Физическая и математическая модель перемещения заготовок. Составление передаточных функций и структурной схемы с использованием VisSim v 5.0.
Процесс работы реечного толкателя
Процесс работы реечного толкателя
Введение
Осуществление процесса перемещения заготовок перпендикулярно их оси (перемещение со стана на рольганг, с рольганга на стол, со стола на стеллаж) в прокатном производстве является часто используемой операцией, от которой также зависит и общая производительность прокатного цеха в целом. Таким образом, процесс перемещения должен происходить с достаточно большой скоростью, но при этом должна сохраняться плавность хода.
Для данного технологического процесса, требуется построить физическую модель процесса с целью оптимального управления работой реечного толкателя. Выделим главные элементы управления в данном процессе, опишем его уравнениями и построим модель процесса с использованием программы VisSim v5.0.
Конструкция реечного толкателя
Реечный толкатель работает следующим образом: от двигателя 6 (см. рис. 1) момент передаётся на шестерню 5 и через реечную передачу 7 приводится в движение штанга толкателя 1, которая и осуществляет перемещение заготовки 8. Плавность движения толкателя обеспечивается демпфирующим устройством 4 и пружиной 3, а опорные ролики 2 поддерживают прямолинейность движения.
Таким образом, в данной схеме можно выделить следующие элементы:
1. Штанга толкателя – является рабочим органом.
2. Опорные ролики – служат для поддержания прямолинейности движения.
3. Пружина – является упругим звеном.
4. Демпфер.
5. Приводная шестерня – служит для передачи привода на рейку.
6. Двигатель – служит для передачи вращающего момента на шестерню.
7. Рейка – передаёт перемещение от шестерни к штанге толкателя.
8. Заготовка.
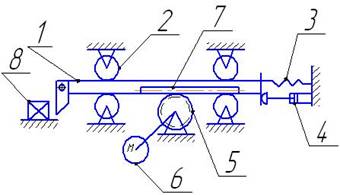
Рис. 1. Схема процесса перемещения заготовок
Физическая модель процесса
Для математического описания процесса необходимо построить физическую модель. В ней покажем силы, действующие на элементы конструкции реечного толкателя.
Физическая модель процесса перемещения заготовок показана на рис. 2.
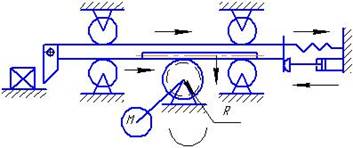
Рис. 2. Физическая модель процесса перемещения заготовок
Математическая модель
Для расчёта системы автоматического управления необходимо иметь её математическое описание в виде совокупности дифференциальных уравнений. Чтобы получить эту совокупность, систему следует разбить на отдельные элементы и для каждого из них составить дифференциальное уравнение. Общее число уравнений должно быть не меньше, чем число независимых переменных, определяющих состояние системы.
Произведём разбивку системы на следующие элементы:
1 звено. Шестерня – рейка:
![]() ,
,
![]() ,
,
где
![]() – делительный диаметр рейки,
– делительный диаметр рейки,
![]() - угол поворота,
- угол поворота,
![]() - перемещение рейки,
- перемещение рейки,
![]() - растяжение пружины.
- растяжение пружины.
2 звено. Пружина:
![]() ,
,
где
![]() - усилие, действующее со стороны пружины,
- усилие, действующее со стороны пружины,
![]() - жесткость пружины.
- жесткость пружины.
3 звено. Штанга:
![]()
![]() ,
,
где
![]() - результирующее усилие перемещения толкателя,
- результирующее усилие перемещения толкателя,
![]() - вес штанги,
- вес штанги,
![]() - масса штанги (1 т.).
- масса штанги (1 т.).
4 звено. Демпфер.
![]() ,
,
где
![]() - скорость перемещения штанги,
- скорость перемещения штанги,
![]() - коэффициент демпфирования.
- коэффициент демпфирования.
Составление передаточных функций и структурной схемы
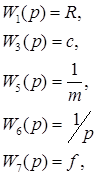
Определим передаточные функции динамических звеньев, соответствующих составленным дифференциальным уравнениям. Для этого необходимо к соответствующим дифференциальным уравнениям применить преобразование Лапласа при нулевых начальных условиях. Из полученного таким образом операторного уравнения находится передаточная функция, которая равна отношению изображения выходной величины к изображению входной величины.
Входная величина передачи – угол ![]() , выходная – перемещение
, выходная – перемещение ![]() . Все уравнения можно разбить на сумматоры и динамические звенья с передаточными функциями:
. Все уравнения можно разбить на сумматоры и динамические звенья с передаточными функциями:
Соединим звенья с сумматорами и, устанавливая необходимые линии связи, составим структурную схему, которая представляет собой графический аналог исходных уравнений. Структурная схема системы показана на рис. 3.
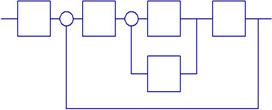
Рис. 3. Структурная схема
Построение модели процесса с использованием VisSim v 5.0
Построенная структурная схема может быть реализована с помощью пакета VisSimv 5.0.
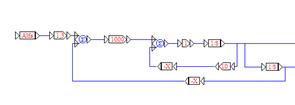
Рис. 4. Построение модели процесса с помощью VisSimv 5.0
Данная программа позволяет не только описать процесс работы реечного толкателя, но и оптимизировать данный процесс. На рис. 5. показаны процессы оптимизации перемещения и скорости реечного толкателя.
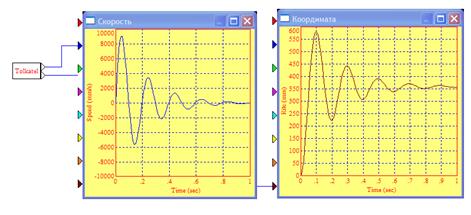
Рис. 5. Оптимизации перемещения и скорости реечного толкателя с помощью VisSimv 5.0
Заключение
В данной работе провели ряд технологических операций с целью получения как можно более качественной модели процесса перемещения заготовок, что позволяет сделать вывод о целесообразности использования данной программы (VisSim v5.0) практически для любого рода задач и тем самым дает возможность экономить достаточно много денежных средств на создание реальной модели процесса.
Похожие работы
-
Проектирование и исследование механизмов шагового транспортера автоматической линии
Содержание Техническое задание Исходные данные Аннотация (реферат) Введение 1. Проектирование основного механизма и определение закона движения
-
Анализ САУ с помощью MATLAB и SIMULINK
Построение временных характеристик с помощью пакета Control System В качестве примера выберем апериодическое звено первого порядка Для построения временных характеристик с помощью пакета Control System используются функции step и impulse.
-
Синтез и анализ механизма двигателя внутреннего сгорания
Содержание Введение 1 Постановка задач проекта 2 Синтез кинематической схемы механизма 3 Синтез рычажного механизма 4 Синтез кулачкового механизма
-
Проектирование и исследование механизмов упаковочного автомата
Проектирование и исследование механизмов упаковочного автомата Автомат предназначен для горизонтального и вертикального перемещения упаковочных изделий в автоматизированном технологическом комплексе. Коленчатый вал I приводится в движение от электродвигателя 13 через муфту 14, планетарный редуктор 15, прямозубую передачу (число зубьев колёс z
-
Транспортирование сырца в сушильные агрегаты. Основные сведения о процессе сушки. Естественная сушка в сушильных сараях
Порядок транспортирования сформованного сырца в сушильные агрегаты. Характеристика различных видов вагонеток. Основные сведения о процессе сушки, расчет интенсивности удаления влаги. Использование естественной сушки в сушильных сараях в теплое время года.
-
Станок с кулисой
Долбежный станок - для долбления пазов и внутренних канавок в отверстиях деталей, а также для строгания вертикально расположенных поверхностей. Проектирование и исследование механизмов привода и подачи станка. Синтез эвольвентного зубчатого зацепления.
-
Характеристика металлорежущих станков
Содержание. Введение…………………………………………………………………3 1. Изучение станков-аналогов…………………………………………….4 2. Режимы резания………………………………………………………...6
-
Механизм поперечно-строгального станка
Синтез и анализ кулачкового механизма. Геометрический расчёт зубчатой передачи. Структурный анализ механизма. Определение передаточного отношения планетарной ступени и подбор чисел зубьев колёс. Построение кинематических диаграмм и профиля кулачка.
-
Расчет шарнирно-рычажных механизмов
1. Структурный анализ главного механизма рис.1 1.1 Кинематическая схема главного механизма (рис. 1) По формуле Чебышева определим число степеней подвижности механизма:
-
Проектирование и исследование механизмов моторного привода дорожного велосипеда мопеда
ПРОЕКТИРОВАНИЕ И ИССЛЕДОВАНИЕ МЕХАНИЗМОВ МОТОРНОГО ПРИВОДА ДОРОЖНОГО ВЕЛОСИПЕДА (МОПЕДА) ВВЕДЕНИЕ Краткое описание установки "привод дорожного велосипеда"