Название: Кинематический анализ зубофрезерного станка модели 5М324А
Вид работы: курсовая работа
Рубрика: Промышленность и производство
Размер файла: 1.05 Mb
Скачать файл: referat.me-304015.docx
Краткое описание работы: СОДЕРЖАНИЕ: Задание 1. Общий вид станка с указанием основных узлов, техническая характеристика станка и его назначение 2. Принципиальные схемы нарезания колёс и соответствующие частные кинематические структуры. Анализ кинематических структур. Общая кинемати- ческая структура станка
Кинематический анализ зубофрезерного станка модели 5М324А
СОДЕРЖАНИЕ:
Задание
1. Общий вид станка с указанием основных узлов, техническая характеристика станка и его назначение
2. Принципиальные схемы нарезания колёс и соответствующие частные кинематические структуры. Анализ кинематических структур. Общая кинемати- ческая структура станка
3. Кинематическая схема станка и её анализ с выводом расчётных формул настройки кинематических цепей
4. Настройка кинематических цепей станка при нарезании колёс по заданным..параметрам.
Список используемой литературы
Задание 1К4
Выполнить кинематический анализ зубофрезерного станка модели 5М324А и произвести его настройку на нарезание цилиндрического прямозубого, косозубого колеса и червячного колеса.
Содержание задания
1. Дать общий вид станка с указанием основных узлов, привести техническую характеристику и определить его назначение.
2. Дать принципиальные схемы нарезания колес и привести соответствующие частные
кинематические структуры. Выполнить анализ кинематических структур. Привести
общую кинематическую структуру станка.
3. Выполнить кинематическую схему станка и произвести ее анализ с выводом расчетных
формул настройки кинематических цепей.
4. Произвести настройку кинематических цепей станка при нарезании колес по следующим данным:
5.
Прямозубое цилиндрическое колесо
| Номер |
Модуль |
Число |
Диаметр |
Число |
Угол |
Направле |
Скорость |
Подача |
| варианта |
m,мм |
зубьев, |
фрезы |
заходов |
подъема |
ние |
резания V, |
Sb , |
| Z |
Dфр , мм |
фрезы |
Витков |
витков |
м/мин |
мм/об |
||
| К |
фрезы, a |
фрезы |
||||||
| 4 |
1,25 |
45 |
71 |
2 |
2°08' |
левое |
41 |
1,6 |
1. Назначение: зубофрезерный полуавтомат мод 5М324А предназначен для нарезания цилиндрических колес с прямыми и винтовыми зубьями и червячных колес в условиях крупносерийного и серийного производства.
Техническая характеристика станка
Наибольший диаметр нарезания прямозубых колес, мм 500
Наибольший модуль колес, мм8
Наибольшая длина зуба прямозубых колес, мм 350
Наибольший угол наклона зубьев, град±60
Наибольшие размеры червячной фрезы, мм
диаметр......................................................................................................... 18
длина............................................................................................................ 20
Пределы частот вращения фрезы, мин 50-31
Пределы вертикальных подач фрезы, мм /об0,68-6,10
Пределы радиальных подач фрезы, мм/об0,35-2,
Мощность главного электродвигателя, кВт 7,5
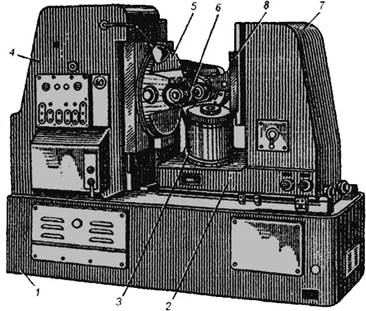
Рисунок 1-Зуборезный станок мод. 5М324А:
1-станина; 2-салазки; 3-стол; 4-неподвижная стойка; 5-суппорт; 6-фреза; 7-подвижная стойка; 8-кронштейн (люнет) для поддержки оправки с заготовкой.
2. Принципиальные схемы нарезания колес и соответствующие частные кинематические структуры. Анализ кинематических структур. Общая кинематическая структура станка.

Рисунок 2-Принципиальная схема нарезания цилиндрического прямозубого колеса

Рисунок 3-Кинематическая структура на нарезание цилиндрического прямозубого колеса
Таблица 1 - Анализ кинематической структуры станка при нарезании цилиндрического прямозубого колеса.
| Обрабатываемая деталь |
цилиндрическое колесо с прямым зубом |
| Структурная схема |
Рисунок 3 |
| Анализируемые параметры |
Результат анализа |
| 1.Образуемая поверхность |
|
| 1.1 Форма поверхности |
эвольвента |
| 1.2Форма производящих линий: |
|
| 1.2.1 Образующей |
эвольвента |
| 1.2.2Направляющей |
прямая |
| 1 .3 Методы получения производящих линий 1.3.1 Образующей |
обкат |
| 1.3.2Направляющей |
касание |
| 2Условная запись движений |
|
| 2.1 Формообразования |
|
| 2.1.1 Скорость резания |
Фv (В1 В2 ) |
| 2.1.2Подачи |
Фs(П3 ) |
| 2.2 Деления |
нет |
| 2.3Врезания |
нет |
| 3 Класс структуры |
К23 |
| 4Структура кинематических групп |
|
| 4.1 Группа движения скорости резания |
|
| 4.1.1 Внутренняя связь |
B1 -3-2-ix -4-5-B2 |
| 4.1 2 Внешняя связь |
M-l-iv P1 -2 |
| 4.2 Группа движения подачи |
|
| 4.2.1 Внутренняя связь |
Нет |
| 4.2.2 Внешняя связь |
M-l-iv -P1 -2-ix -4-is -P2 -6-BB-П3 |
| 5 Настройка движений по параметрам |
|
| 5.1 Движение скорости резания |
|
| 5.1.1 На траекторию |
Гитара ix |
| 5.1.2 На путь |
нет |
| 5.1.3На скорость |
Гитара iv |
| 5.1.4 На направление |
Реверс P1 |
| 5.1.5 На исходное положение |
нет |
| 5.2 Движение подачи |
|
| 5.2.1 На траекторию |
Нет |
| 5.2.2 На путь |
Упор В |
| 5.2.3На скорость |
Гитара is |
| 5.2.4 На направление |
Реверс Р2 |
| 5.2.5 На исходное положение |
Упор Н |

Рисунок 4-Принципиальная схема нарезания косозубого цилиндрического колеса
|
|
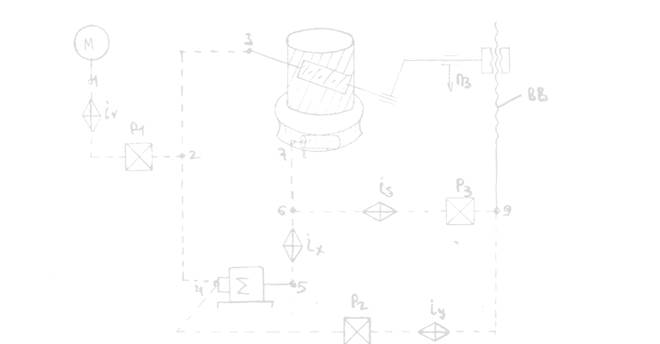
Рисунок 5-Кинематическая структура на нарезание цилиндрического колеса с винтовыми зубьями
Таблица 2-Анализ кинематической структуры станка при нарезании цилиндрического колеса с винтовым зубом.
| Обрабатываемая деталь |
цилиндрическое колесо с винтовым зубом |
| Структурная схема |
Рисунок 5 |
| Анализируемые параметры |
Результат анализа |
| 1. Образуемая поверхность |
|
| 1.1 Форма поверхности |
винтовая |
| 1.2Форма производящих линий: |
|
| 1.2.10бразующей |
эвольвента |
| 1.2.2Направляющей |
винтовая |
| 1 .ЗМетоды получения производящих линий |
|
| 1.3.1 Образующей |
обкат |
| 1.3.2Направляющей |
касание |
| 2Условная запись движений |
|
| 2.1 Формообразования |
|
| 2.1. 1Скорость резания |
Фv (В,В2 ) |
| 2.1.2Подачи |
Фs (П3 В4 ) |
| 2.2Деления |
Нет |
| 2.3Врезания |
Нет |
| 3 Класс структуры |
С24 |
| 4Структура кинематических трупп |
|
| 4.1Группа движения скорости резания |
|
| 4.1.1 Внутренняя связь |
B1 -3-2-4-S-5-ix -6-7-8-B2 |
| 4.1.2Внешняяя связь |
M-l-iv -P1 -2 |
| 4.2Группа движения подачи |
|
| 4.2.1 Внутренняя связь |
П3 -ВВ-9-Р2 -4-S-5- ix -6-7-8-B4 |
| 4.2.2Внешняяя связь |
M-l-iv -P1 -2-4-S-5- ix -6-is-P3 -9 |
| 5Настройка движений по параметрам |
|
| 5.1 Движение скорости резания |
|
| 5.1.1 На траекторию |
Гитара ix |
| 5.1.2 На путь |
Нет |
| 5.1.3На скорость |
Гитара iv |
| 5.1.4 На направление |
Реверс P1 |
| 5.1.5 На исходное положение |
нет |
| 5.2 Движение подачи |
|
| 5.2.1 На траекторию |
гитарой iy , реверс Р2 |
| 5.2.2 На путь |
упор В |
| 5.2.3На скорость |
гитара is |
| 5.2.4 На направление |
реверс Р3 |
| 5.2.5 На исходное положение |
Упор Н |
 |
 |
а. б.
Рисунок 6-Принципиальные схемы нарезания червячных колес
а) нарезание червячного колеса методом тангенсальной подачи;
б) нарезание червячного колеса методом радиального врезания.
|
|
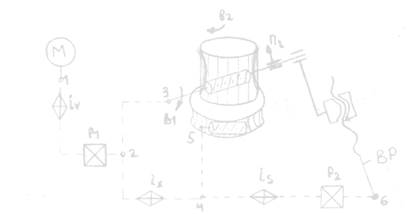
Рисунок 7-Кинематическая структура на нарезание червячного колеса методом радиального врезания
Таблица 3-Анализ кинематической структуры станка при нарезании червячного колеса методом радиального врезания.
| Обрабатываемая деталь |
Червячное колесо |
|
| Структурная схема |
Рисунок 7 |
|
| Анализируемые параметры |
Результат анализа |
|
| 1. Образуемая поверхность 1.1 Форма поверхности 1.2Форма производящих линий: 1.2.1 Образующей 1.2.2Направляющей 1.3Методы получения производящих линий 1.3.1 Образующей 1.3.2Направляющей 2Условная запись движений 2.1 Формообразования 2.1.1 Скорость резания |
винтовая эвольвента винтовая обкат след Фv (В1 В2 ) |
|
| 2.1.2Подачи |
Нет |
|
| 2.2 Деления |
Нет |
|
| 2.3 Врезания |
Вр(Пз) |
|
| 3Класс структуры |
С12 |
|
| 4Структура кинематических групп |
||
| 4.1 Группа движения скорости резания |
||
| 4.1.1 Внутренняя связь |
B1 -3-2-ix -4-5-B2 |
|
| 4.1.2Внешняяя связь |
M-l-iv -P1 -2 |
|
| 4.2Группа движения подачи |
нет |
|
| 4.3Группа движения врезания |
||
| 4.3.1 Внутренняя связь |
нет |
|
| 4.3.2Внешняяя связь |
M-l-iv -P1 -2-ix -4-i5 -P2 -6-ВР-П3 |
|
| 5Настройка движений по параметрам |
||
| 5 Л Движение скорости резания |
||
| 5.1.1 На траекторию |
Гитара ix |
|
| 5.1.2 На путь |
Нет |
|
| 5.1.3 На скорость |
Гитара iv |
|
| 5.1.4 На направление |
Реверс P1 |
|
| 5.1.5 На исходное положение |
нет |
|
| 5.2 Движение врезания |
||
| 5.2.1 На траекторию |
Гитара iv , реверс P1 |
|
| 5.2.2 На путь |
упоры |
|
| 5.2.3На скорость |
Гитара is |
|
| 5.2.4 На направление |
Реверс Р2 |
|
| 5.2.5 На исходное положение |
Упоры |
|
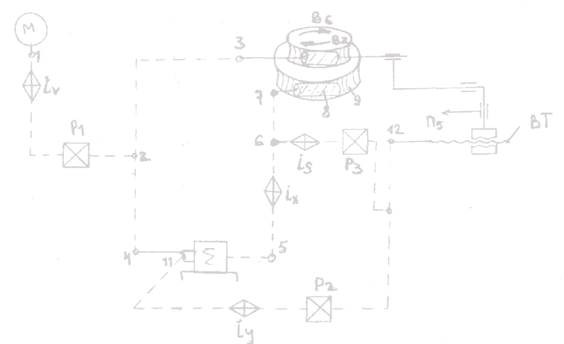
Рисунок 8-Кинематическая структура на нарезание червячного колеса методом
тангенсального врезания
Таблица 4- Анализ кинематической структуры станка при нарезании червячных
колес методом тангенсального врезания.
| Обрабатываемая деталь |
Червячное колесо |
| Структурная схема |
Рисунок 8 |
| Анализируемые параметры |
Результат анализа |
| 1. Образуемая поверхность 1.1 Форма поверхности 1.2Форма производящих линий: 1.2.1Образующей 1.2.2Направляющей 1.3Методы получения производящих линий 1.3.1Образующей 1.3.2Направляющей 2Условная запись движений 2.1 Формообразования 2.1.1 Скорость резания 2.1.2Подачи 2.2Деления |
винтовая эвольвента винтовая обкат след Фv (В1 В2 ) Фs (П5 В6 ) Нет |
| 2.3Врезания |
Нет |
| 3Класс структуры |
С24 |
| 4Структура кинематических групп |
|
| 4.1 Группа движения скорости резания |
|
| 4.1.1 Внутренняя связь |
B1 -3-2-4-S-5-ix -6-7-8-9-B2 |
| 4.1 2Внешняяя связь |
M-l-iv -P1 -2 |
| 4.2Группа движения подачи |
|
| 4.2.1 Внутренняя связь |
П5 -BT-12-10-P2 -iy -l l-S-5- ix -6-7-8-9-B6 |
| 4.2.2Внешняяя связь |
M-1-iv -P1 -2-4-S-5- ix -6- is -P3 -10 |
| 5Настройка движений по параметрам |
|
| 5.1 Движение скорости резания |
|
| 5.1.1 На траекторию |
Гитара ix |
| 5.1.2 На путь |
Heт |
| 5.1.3На скорость |
Гитара iv |
| 5.1.4 На направление |
Реверс P1 |
| 5.1.5 На исходное положение |
Нет |
| 5.2 Движение подачи |
|
| 5.2.1 На траекторию |
Гитара iv , реверс P1 |
| 5.2.2 На путь |
Упоры |
| 5.2.3На скорость |
Гитара is |
| 5.2.4 На направление |
Реверс Р3 |
| 5.2.5 На исходное положение |
Упоры |
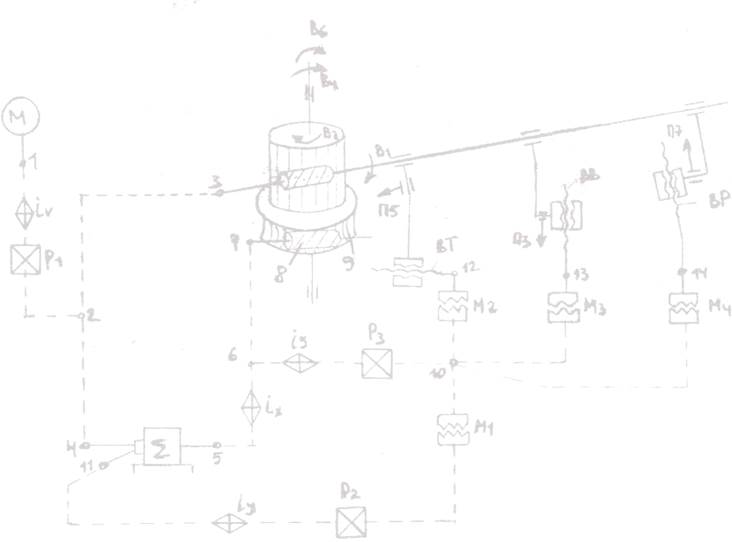
Рисунок 8-Общая кинематическая структура станка
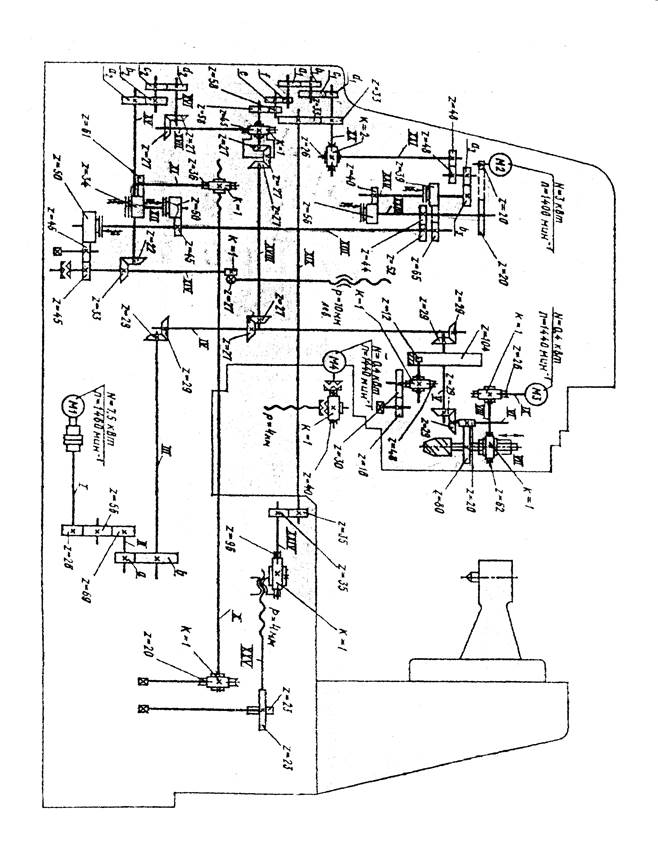 3. Анализ кинематической схемы станка
3. Анализ кинематической схемы станка
|
|


|
|

|
|

|
|
|
|

Похожие работы
-
Система координат станка детали и инструмента
Система координат детали, станка, инструмента 1 Система координат детали. 2 Система координат станка. 3 Система координат инструмента. Система координат детали
-
Металлорежущие станки
Содержание Задание № 1. Вертикально-фрезерный станок 6560 с крестовым столом. Назначение, область применения станка, виды выполняемых работ. Техническая характеристика станка. Основные особенности конструкции станка. Основные узлы станка, их назначение.
-
Вертикально- фрезерные станки с ЧПУ компании Инжиниринг
РЕФЕРАТ НА ТЕМУ: Вертикально- фрезерные станки с чпу компании Инжиниринг. О КОМПАНИИ В ЦЕЛОМ. Современные, высокопроизводительные станки сЧПУ тайваньского производства, предлагаемой компанией, используются во всех отраслях промышленности: автомобильной, энергетической промышленности, аэрокосмической промышленности, приборостроении и прочие.
-
Гидравлический привод протяжного станка
Курсовая работа по МЖГ «Гидравлический привод протяжного станка» Привод, гидравлическая схема которого представлена на рисунке, состоит из бака 1, который содержит масло (плотность ρ=850кг/м
-
Выбор сечения проводов и кабелей по допустимому нагреву
Практическая работа 1 Тема: Выбор сечения проводов и кабелей по допустимому нагреву. Программа работы. 1.Записать исходные данные электроприемников ( номинальная мощность, напряжение, cos φ , к.п.д.)
-
Расчет настройки токарно затыловочного станка модели 96
Министерство образования и наук Украины Сумский государственный университет Кафедра «Технология машиностроения, станки и инструменты» Расчет настройки токарно – затыловочного станка модели 96
-
Исследование влияния температурных деформаций шпиндельного узла горизонтально-фрезерного станка на точность обработки
Исследование зависимости температурной деформации шпиндельного горизонтально-фрезерного станка (при холостом ходу) и его узлов от времени работы и охлаждения. Пути минимизации воздействия нагрева на успешность осуществления технологического процесса.
-
Металлорежущий станок
Расчет металлорежущих станков. Кинематический анализ станка.
-
Кинематический и силовой расчет механизма долбежного станка с качающейся кулисой
Структурный анализ, построение положений механизма и планов скоростей для рабочего и холостого хода, верхнего и нижнего крайних положений. Построение планов ускорений, кинетостатический расчет механизма. Определение сил инерции и сил тяжести звеньев.
-
Обозначение осей координат и направлений перемещений исполнительных органов на схемах станков с числовым программным управлением (ЧПУ)
Стандартная система координат станка с числовым программным управлением. Направления стандартной системы координат различных видов станков. Методика и условные обозначения осей координат и направлений перемещений на схемах агрегатных станков с ЧПУ.