Название: Принципы построения систем автоматического управления
Вид работы: контрольная работа
Рубрика: Информатика и программирование
Размер файла: 52.58 Kb
Скачать файл: referat.me-134806.docx
Краткое описание работы: Теория автоматического управления как наука, предмет и методика ее изучения. Классификация систем автоматического управления по различным признакам, их математические модели. Дифференциальные уравнения систем автоматического управления, их решения.
Принципы построения систем автоматического управления
Предмет:
"Теория автоматического управления"
Тема:
"Принципы построения систем автоматического управления"
1. Основные понятия и определения
Теория автоматического управления (ТАУ) – наука о принципах построения, методах расчета и исследования автоматических систем.
ТАУ рассматривает класс систем, основой функционирования которых является процесс преобразования энергии (в отличие от информационных систем – преобразующих информацию).
Системой автоматического управления (САУ) называется совокупность управляемого объекта и устройства управления, взаимодействующих в соответствии с заданным законом (алгоритмом) управления.
Типовая, структурная схема сис-темы автоматического управления приведенана рис.
Управлением в технических системах называется преднамеренное воздействие на управляемый объект, обеспечивающее достижение поставленной цели.
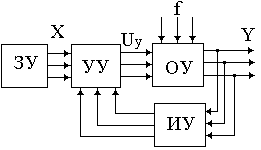
Рис. 1
2. Классификация САУ
Системы автоматического управления можно классифицировать по различным признакам:
1. По характеру изменения выходной величины:
– системы автоматического регулирования (САР, стабилизации) – системы, в которых выходная величина поддерживается на постоянном уровне, определенном заранее;
– следящие системы – это системы, в которых выходная величина изменяется в соответствии с заранее неизвестной функцией, определяемой заданием;
– программные системы – это системы, в которых выходная величина изменяется в соответствии с программой определяемой заданием;
– экстремальные системы – это системы, в которых выходная величина поддерживается на уровне некоторого экстремума;
– оптимальные системы – это системы, в которых выход таков, что некоторый показатель наилучший в определенном смысле.
2. По принципу управления:
– системы с управлением по отклонению – системы, в которых управляющее воздействие вырабатывается в функции разности задающего и возмущающего воздействия. Этот принциписпользуется в замкнутых системах управления. Структурная схема системы с управлением по отклонению приведена на рис. 2а.
– системы с управлением по возмущению – системы, в которых управляющее воздействие вырабатывается в функции задающего или возмущающего воздействия. Этот принцип управления чаще всего используется в разомкнутых системах. Структура системы с управлением по возмущению приведена на рис. 2б.
– системы скомбинированным управлением – системы, в которых сочетается первый и второй принципы управления. Структура системы с комбинированным управлением приведена на рис. 2в.
|
|
|
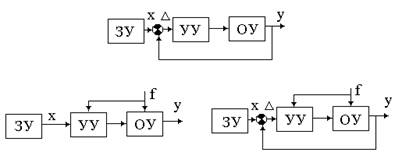
Рис. 2
3. По характеру изменения сигналов: непрерывные; дискретные.
4. По числу регулируемых величин: одномерные; многомерные.
5. По виду ошибок: статические; астатические.
6. По характеру описываемых уравнений: линейные – нелинейные; детерминированные – стохастические; стационарные – нестационарные и т.д.
Основные вопросы, которые рассматривает теория автоматического управления:
Математические модели систем автоматического управления.
2. Определение устойчивости систем управления.
3. Анализ качества систем.
4. Коррекцию систем.
5. Задачи анализа и синтеза оптимальных систем.
3. Математические модели САУ
Для описания сигналов и систем, в зависимости от используемых методов исследования, применяются различные формы их представления во временной, частотной или операторной области. Взаимосвязь между областями осуществляется с помощью преобразований Фурье и Лапласа, как показано на рис. 3.
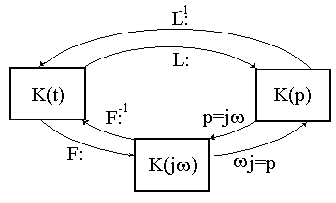
Рис. 3
Преобразование Фурье. Соответствие между временным и частотным представлением сигнала можно выразить через преобразование Фурье:
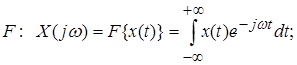 (2.1)
(2.1)
и обратное преобразование Фурье:
 (2.2)
(2.2)
Преобразование Лапласа. Соответствие между временным и операторным представлением сигнала можно выразить через преобразование Лапласа:
 (2.3)
(2.3)
и обратное преобразование Лапласа:
 (2.4)
(2.4)
где р = c+ j w – оператор Лапласа, c – область сходимости, x(t) – оригинал, а X(p) – изображение.
Для дискретных систем используют дискретные преобразования Лапласа и Фурье, а также ряд других преобразований (Z, W и др.).
Основные свойства (теоремы) преобразования Лапласа
Свойство линейности
![]() (2.5)
(2.5)
2. Дифференцирование оригинала
 , (2.6)
, (2.6)
![]() ,
,
где .
.
При нулевых начальных условиях
![]() .
.
3. Интегрирование оригинала
 . (2.7)
. (2.7)
4. Теорема о свертке (умножения в комплексной области)
 . (2.8)
. (2.8)
5. Теорема разложения.
Если где
где 
то оригинал, в соответствии с теоремой Коши о вычетах может быть определен как сумма вычетов по полюсам подынтегральной функции
 (2.9)
(2.9)
6. Теорема о предельных значениях функции.
Начальное значение функции:![]() . (2.10)
. (2.10)
Конечное значение функции: ![]() . (2.11)
. (2.11)
7. Теорема запаздывания
![]() . (2.12)
. (2.12)
4. Дифференциальные уравнения САУ
При математическом описании систем автоматического управления составляют уравнения статики и динамики.
Уравнения статики описывают установившиеся режимы и, как правило, являются алгебраическими.
Уравнения динамики описывают переходные процессы в системах автоматического управления и представляют собой дифференциальные, интегро-дифференциальные или разностные уравнения.
Уравнения динамики системы составляются на основе уравнений отдельных элементов, входящих в систему. Уравнения элементов записываются на основе физических законов, определяющих поведение данного элемента, чаще всего это законы сохранения энергии (Кирхгофа, Ньютона, и др.).
В качестве примера рассмотрим порядок составления уравнения динамики для RLC – четырехполюсника (рис. 4).
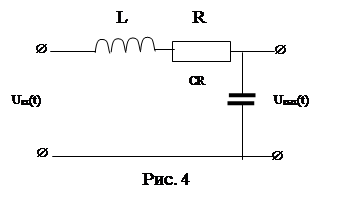 |
В соответствии сзаконом Кирхгофа можно записать уравнения
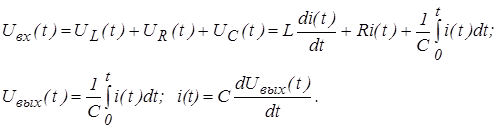
Выполнив преобразования, получим дифференциальное уравнение данной цепи.

Из условия равенства нулю производных, получим уравнение статики
![]()
Линеаризация дифференциальных уравнений
Обычно дифференциальные уравнения САУ являются нелинейными вследствие нелинейности характеристик элементов системы (порог чувствительности, ограничение по мощности, трение, люфт, зазор, гистерезис и др.). Решение нелинейных уравнений существенно сложнее, чем линейных. Поэтому всегда, если это возможно, необходимо преобразовать нелинейное уравнение к приближенному линейному, т.е. выполнить линеаризацию.
Линеаризация – замена нелинейного уравнения приближенным линейным. Линеаризация возможна при следующих условиях:
Если отклонения переменных D x и D y относительно установившихся значений x0 и y0 малы (рис. 5а). Это условие выполняется для широкого класса систем автоматического управления (например, для замкнутых систем).
2. Система не содержит существенно – нелинейных элементов, т.е. характеристики должны быть однозначными и не иметь разрывов 1-го или 2-го рода (рис. 5б-г).
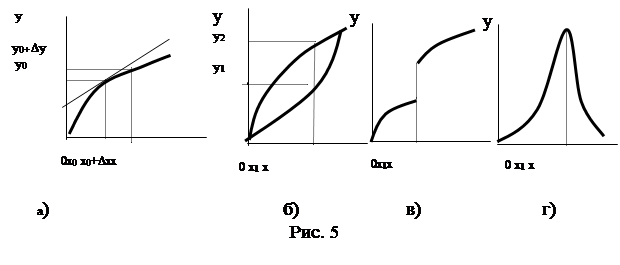 |
Линеаризация осуществляется путем разложения нелинейной функции в ряд Тейлора в окрестности точки, соответствующей установившемуся режиму.
Выразим переменные x и y через их установившиеся значения x0 и y0 и отклонения D x и D y .
При этом
 (3.1)
(3.1)
Разложение в ряд Тейлора имеет вид:
 (3.2)
(3.2)
Вычтем уравнение установившегося режима, что соответствует переносу начала координат в точку (x0 , y0 ), при этом получим линеаризованное уравнение:
 (3.3)
(3.3)
Отличие линеаризованного уравнения от исходного нелинейного:
Линеаризованное уравнение линейное.
2. Линеаризованное уравнение приближенное.
3. Линеаризованное уравнение это уравнение в отклонениях (вариациях).
Литература
1. Автоматизированное проектирование систем автоматического управления. / Под ред. В.В. Солодовникова. – М.: Машиностроение, 1990. -332 с.
2. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования, издание третье, исправленное. Москва, издательство «Наука», Главная редакция физико-математической литературы, 1975.
3. Гринченко А.Г. Теория автоматического управления: Учебн. пособие. – Харьков: ХГПУ, 2000. –272 с.
4. Зайцев Г.Ф. Теория автоматического управления и регулирования. – 2-е изд., перераб. и доп. Киев, Издательство Выща школа Головное издательство, 1989.
5. Справочник по теории автоматического управления. /Под ред. А.А. Красовского – М.: Наука, 1987. – 712 с.
6. Шандров Б.В. Технические средства автоматизации: учебник для студентов высших учебных заведений. Москва, Издательский центр «Академия», 2007.
Похожие работы
-
Кодирование информации
Основные понятия и определения кодирования информации. Кодовая комбинация и ее длина. Классификация кодов по различным признакам, способы их представления, назначение. Представление в виде кодовых деревьев или многочленов, матричное и геометрическое.
-
Точность систем автоматического управления
Порядок оценки точности системы автоматического управления по величине установившейся ошибки при типовых воздействиях, механизм ее повышения. Разновидности ошибок и методика их вычисления. Определение ошибок по виду частотных характеристик системы.
-
Коррекция дискретных систем управления
Способы дискретной коррекции систем управления. Порядок расчета корректирующего звена для дискретной системы. Особенность методов непосредственного, последовательного и параллельного программирования. Реализация дискретных передаточных функций.
-
Автоматизированные системы управления распределительными устройствами низкого напряжения
В настоящее время к технологическому оборудованию и, в частности, к распределительным системам низкого напряжения предъявляются все более высокие требования по надежности, функциональности, безопасности и простоте обслуживания.
-
Теория автоматического управления
МИНИСТЕРСТВО ВЫСШЕГО И СРЕДНЕГО СПЕЦИАЛЬНОГО ОБРАЗОВАНИЯ РФ НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Расчетно-графическая работа №1
-
Порядок моделирования входного сигнала
Порядок и методика моделирования входного сигнала, общие принципы представления сигналов математическими моделями. Взаимосвязь математических моделей с компьютерными, их место и значение на современном этапе. Пакеты для моделирования различных процессов.
-
Частотные характеристики линейных систем управления
Математический аппарат исследования САУ. Дифференциальные уравнения, описывающие движение системы являю тся уравнениями динамики. Дифференциальные уравнения САУ, ее элементы. Дифференциальные уравнения высокого порядка. Математическая модель системы.
-
Анализ процесса регулирования непрерывной системы. Анализ процесса управление цифровой системы и синтез передаточной функции корректирующего цифрового устройства управления
Теория автоматического управления. Передаточная функция системы по ее структурной схеме. Структурная схема и передаточная функция непрерывной САР. Устойчивость системы. Исследование переходного процесса. Расчет и построение частотных характеристик.
-
Анализ одноконтурной САУ четвёртого порядка
Анализ устойчивости САУ. Расчёт частотных характеристик замкнутой САУ. Показатели качества регулирования. Синтез последовательного корректирующего устройства. Показатели качества регулирования скорректированной САУ. Моделирование скорректированной САУ.
-
Исследование системы автоматического управления
Теория автоматического управления - совокупность целесообразных действий, направленных на достижение поставленных целей. Объект управления - техническое устройство, в котором протекает управляемый процесс. Алгебраические критерии устойчивости Гурвица.