Название: Компьютерная модель СГ в координатах d, q, 0 в режиме ХХ
Вид работы: дипломная работа
Рубрика: Информатика и программирование
Размер файла: 1.19 Mb
Скачать файл: referat.me-139999.docx
Краткое описание работы: Простейшая компьютерная модель турбоагрегата, исследование на ней динамической устойчивости. Создание компьютерной модели СГ в координатах d, q, 0, получение осциллограммы токов в обмотках статора и ротора и напряжения в обмотках статора в режиме ХХ.
Компьютерная модель СГ в координатах d, q, 0 в режиме ХХ
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
«ХАРЬКОВСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ»
Кафедра “Электрические станции”
Расчетное задание
по курсу
«Моделирование в энергетике»
Выполнили: студенты гр. Э – 52Б
Мовчан А.Е.
Жирма О.В.
Семенюк Н.
Принял: доцент Пискурев М.Ф.
Харьков – 2006
СОДЕРЖАНИЕ
Задание
1. Простейшая компьютерная модель турбоагрегата. Исследование динамической устойчивости
1.1 Исследование динамической устойчивости при отключении ЛЭП
а) При отклонении угла ![]() меньше
меньше ![]()
б) При отклонении угла ![]() больше
больше ![]()
в) При выпадении из синхронизма
2.2 Исследование динамической устойчивости при КЗ
1.3. Исследование динамической устойчивости при КЗ с учетом АПВ
2. Компьютерная модель СГ в координатах d, q, 0 в режиме ХХ
ЗАДАНИЕ
1.Создать простейшую компьютерную модель турбоагрегата и исследовать на ней динамическую устойчивость при:
1.1. отключении ЛЭП
1.2. КЗ
1.3. КЗ с учетом АПВ
Примечание:
В п. 1.1 получить осциллограммы мощности и угла ![]() при отклонении угла
при отклонении угла ![]() меньше
меньше ![]() , больше
, больше ![]() , при выпадении из синхронизма.
, при выпадении из синхронизма.
В п. 1.2 и 1.3 получить осциллограммы мощности турбины, синхронной мощности, асинхронной мощности и угла ![]() .
.
2.Создать компьютерную модель СГ в координатах d, q, 0 и получить осциллограммы токов в обмотках статора и ротора и напряжения в обмотках статора в режиме ХХ.
1. Простейшая компьютерная модель турбоагрегата. Исследование динамической устойчивости
Простейшая компьютерная модель турбоагрегата была получена путем реализации системы уравнения (1):
(1) 
где ![]() - мощность турбины;
- мощность турбины;
![]() - синхронная мощность;
- синхронная мощность;
![]() - асинхронная мощность;
- асинхронная мощность;
![]() - суммарное сопротивление;
- суммарное сопротивление;
![]() - потери мощности на демпфирование;
- потери мощности на демпфирование;
![]() - скольжение.
- скольжение.
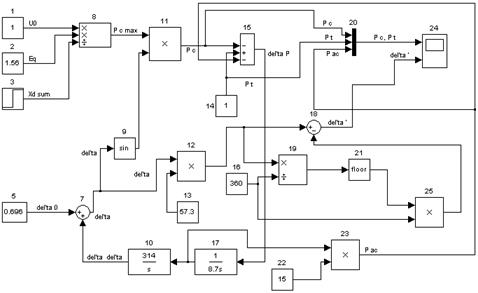
Рисунок 1 - Математическая модель турбоагрегата с учетом демпферного момента
Блок 3 моделирует рост суммарного сопротивления ЛЭП при ее отключении, влияя, таким образом, на величину отклонения угла ![]() .
.
I Блоки 1,2,3,8 позволяю получить максимальную электрическую мощность турбоагрегата.
II Блоки 5,7,9,10,12,13,15,16,17,18,19,21,25 моделируют изменение угла ![]() ( угол отклонения величины электрической мощности от мощности турбины).
( угол отклонения величины электрической мощности от мощности турбины).
Блоки группы I, II совместно с блоком 11 моделируют синхронную мощность турбоагрегата (электрическую мощность).
А блоки 22,23 с частью бл. I, II - асинхронную мощность турбоагрегата.
С помощью блока 14 задается постоянная величина мощности турбины.
1.1 Исследуем динамическую устойчивость при отключении ЛЭП :
а) При отклонении угла ![]() меньше
меньше ![]()
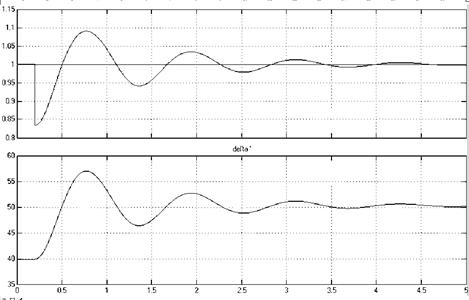
Рисунок 2 – Осциллограммы мощности и угла ![]() , при отклонении угла
, при отклонении угла ![]() меньше
меньше ![]()
Видим, что в нормальном режиме ![]() =
=![]() , угол
, угол ![]() . При отключении ЛЭП в момент времени 0,2 с суммарное сопротивление увеличивается на 20%. Этот момент соответствует провалу в характеристике мощности турбины.
. При отключении ЛЭП в момент времени 0,2 с суммарное сопротивление увеличивается на 20%. Этот момент соответствует провалу в характеристике мощности турбины.
Затем мощность турбины плавно возрастает до момента, соответствующего максимальному отклонению угла ![]() от величины
от величины ![]() . Отклонение угла
. Отклонение угла ![]() = 57о
.
= 57о
.
При заданных условиях модель динамически устойчива. При t = 5 с система возвращается к нормальному режиму работы.
б) При отклонении угла ![]() больше
больше ![]()
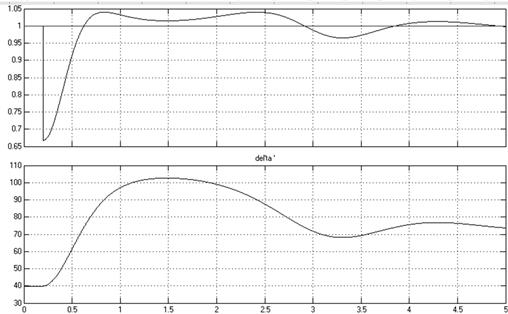
Рисунок 3 – Осциллограммы мощности и угла ![]() , при отклонении угла
, при отклонении угла ![]() больше
больше ![]()
В нормальном режиме ![]() =
=![]() , угол
, угол ![]() . При отключении ЛЭП в момент времени 0,2 с суммарное сопротивление увеличивается на 50%. Этот момент соответствует провалу в характеристике мощности турбины.
. При отключении ЛЭП в момент времени 0,2 с суммарное сопротивление увеличивается на 50%. Этот момент соответствует провалу в характеристике мощности турбины.
Затем мощность турбины плавно возрастает до момента, соответствующего углу ![]() =
= ![]() . Максимальное отклонение угла
. Максимальное отклонение угла ![]() = 104о
.
= 104о
.
При заданных условиях модель еще динамически устойчива. При t = 5 с система возвращается к нормальному режиму работы.
в) При выпадении из синхронизма
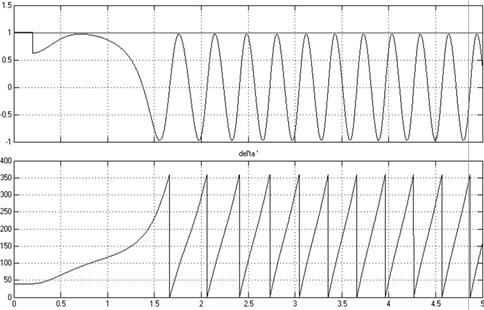
Рисунок 4 – Осциллограммы мощности и угла ![]() , при выпадении из синхронизма
, при выпадении из синхронизма
В нормальном режиме ![]() =
=![]() , угол
, угол ![]() . При отключении ЛЭП в момент времени 0,2 с суммарное сопротивление увеличивается на 60%. Этот момент соответствует провалу в характеристике мощности турбины.
. При отключении ЛЭП в момент времени 0,2 с суммарное сопротивление увеличивается на 60%. Этот момент соответствует провалу в характеристике мощности турбины.
Затем мощность турбины плавно возрастает до момента, соответствующего углу ![]() =
= ![]() . Максимальное отклонение угла
. Максимальное отклонение угла ![]() = 360о
.
= 360о
.
При заданных условиях модель динамически не устойчива.
1.2 Исследование динамической устойчивости при КЗ
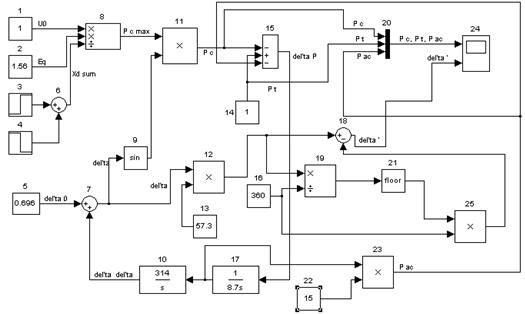
Рисунок 5 - Математическая модель турбоагрегата при КЗ
Блок 3 моделирует увеличение сопротивления ЛЭП при КЗ.
Блок 4 позволяет получить снижение суммарного сопротивления в послеаварийном режиме, вызванное отключением РЗ поврежденного участка.
Блоки 3,4,6 моделируют изменение суммарного сопротивления ЛЭП при КЗ.
Остальные блоки выполняют прежние функции.
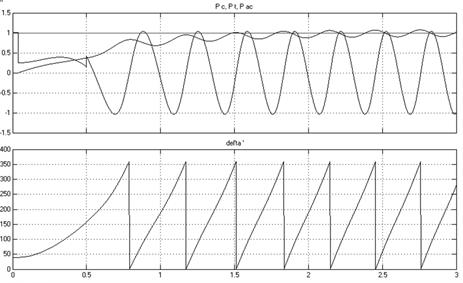
Рисунок 6 – Осциллограммы мощности турбины, синхронной мощности, асинхронной мощности и угла ![]() при КЗ
при КЗ
В нормальном режиме ![]() =
=![]() ,
, ![]() , угол
, угол ![]() . При КЗ в момент времени 0,04 с суммарное сопротивление увеличивается на 400%. Этот момент соответствует провалу в характеристике синхронной мощности турбины. Асинхронная мощность начинает возрастать.
. При КЗ в момент времени 0,04 с суммарное сопротивление увеличивается на 400%. Этот момент соответствует провалу в характеристике синхронной мощности турбины. Асинхронная мощность начинает возрастать.
Затем синхронная мощность турбины плавно возрастает до момента, соответствующего углу ![]() =
= ![]() . Максимальное отклонение угла
. Максимальное отклонение угла ![]() = 360о
.
= 360о
.
В момент времени 0,5 с срабатывает РЗ, отключая поврежденный участок.
Однако в послеаварийном режиме система динамически не устойчива.
1.3 Исследование динамической устойчивости при КЗ с учетом АПВ
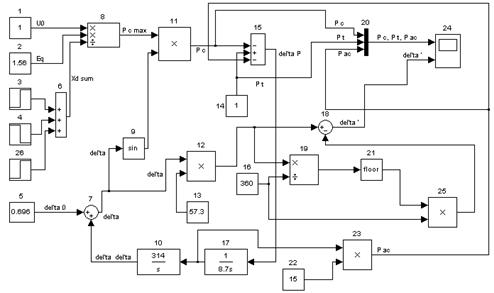
Рисунок 7 - Математическая модель турбоагрегата при КЗ с учетом АПВ
Блок 3 моделирует увеличение сопротивления ЛЭП при КЗ.
Блок 4 позволяет получить снижение суммарного сопротивления в послеаварийном режиме, вызванное отключением РЗ поврежденного участка.
Блок 26 характеризует снижение суммарного сопротивления, вызванное срабатыванием АПВ.
Блоки 3,4,6,26 моделируют изменение суммарного сопротивления ЛЭП при КЗ с учетом АПВ.
Остальные блоки выполняют прежние функции.
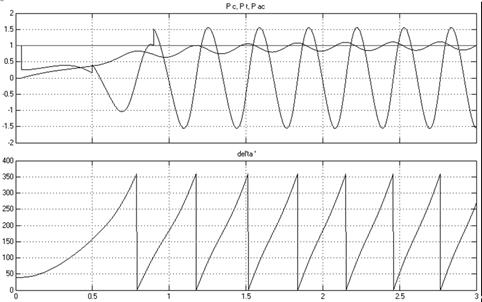
Рисунок 8 – Осциллограммы мощности турбины, синхронной мощности, асинхронной мощности и угла ![]() при КЗ с учетом АПВ
при КЗ с учетом АПВ
В нормальном режиме ![]() =
=![]() ,
, ![]() , угол
, угол ![]() . При КЗ в момент времени 0,04 с суммарное сопротивление увеличивается на 400%. Этот момент соответствует провалу в характеристике синхронной мощности турбины. Асинхронная мощность начинает возрастать.
. При КЗ в момент времени 0,04 с суммарное сопротивление увеличивается на 400%. Этот момент соответствует провалу в характеристике синхронной мощности турбины. Асинхронная мощность начинает возрастать.
Затем синхронная мощность турбины плавно возрастает до момента, соответствующего углу ![]() =
= ![]() . Максимальное отклонение угла
. Максимальное отклонение угла ![]() = 360о
.
= 360о
.
В момент времени 0,5 с срабатывает РЗ, отключая поврежденный участок.
В момент времени 0,9 с срабатывает АПВ. Но модель остается динамически неустойчивой.
2. Компьютерная модель СГ в координатах d , q , 0
а) Режим ХХ
Компьютерная модель СГ в координатах d, q, 0 была получена путем реализации системы уравнений (2), (3), (4).
(2) 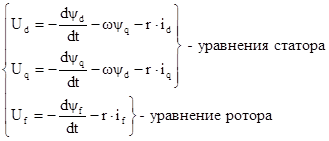
Так как ОВ расположена перпендикулярно относительно обмотки статора по оси q, то никаких потоков в этой обмотке ток, протекающий в ОВ не создает. Следовательно:
(3) 
В системе уравнений (3) все коэффициенты постоянные величины: ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
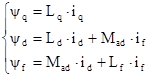
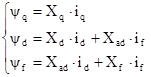
Учитывая, что в относительных единицах собственные и взаимные индуктивности равны индуктивным сопротивлениям, то:
![]() ,
, ![]() ,
, ![]() ,
, ![]()
Тогда систему уравнений (3) можно записать в таком виде:
(4) 
Системы уравнений (2), (3), (4) представляют собой основу математической модели СГ – суперблок Generator.
Реализация суперблока – Generator:
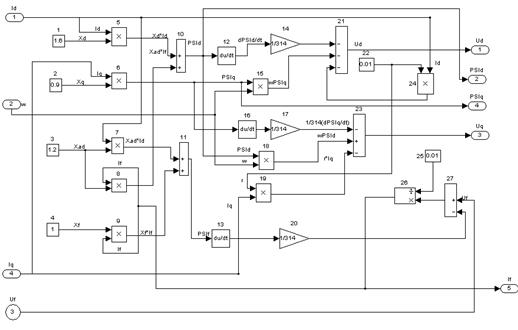
Рисунок 9 – Математическая модель суперблока Generator
I Блоки 1,2,3,4 моделируют сопротивления обмоток статора и ротора.
II Часть бл. I группы совместно с бл.5,8,10 создают потокосцепление обмотки d статора.
III Блоки 2,6 - потокосцепление обмотки q статора.
Часть бл. I группы совместно с бл.7,9,11 – потокосцепление ОВ.
Часть бл. II, III групп совместно с бл.12,14,15,21,22,24 моделируют напряжение обмотки d статора.
Часть бл. II, III групп совместно с бл.16,17,18,19,22,23 моделируют напряжение обмотки q статора.
Часть бл. III группы совместно с бл.13,20,25,26,27 моделируют ток ОВ.
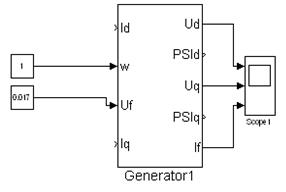
Рисунок 10 – Математическая модель СГ в режиме ХХ
В режиме ХХ токи в обмотках d, q статора равны 0. Напряжение в ОВ зададим равным 0,017 о.е.
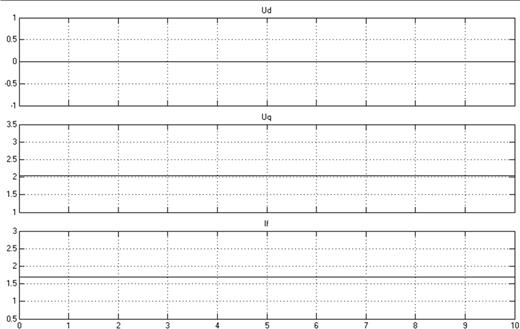
Рисунок 11 – Осциллограммы токов в обмотках статора и ротора и напряжения в обмотках статора в режиме ХХ
Таким образом, в режиме ХХ напряжение в обмотке d статора отсутствует. А напряжение в обмотке q статора и ток в ОВ постоянны по величине.
Похожие работы
-
Обчислення координат курсору миші при переміщенні
Технічне обґрунтування та етапи розроблення програми, яка здатна виводити координати курсору миші при переміщенні, а також відображати відстань та швидкість, з якою проходить курсор між двома обраними точками. Основні елементи та загальні правила роботи.
-
Практичний розрахунок ефективності системи електронного документообігу
У статті проведено розрахунок ефективності роботи системи електронного документообіг по результатам функціонування за 12місяців. На основі проведеного розрахунку надано рекомендації щодо оцінки поточної роботи виконавців.
-
Лабораторная работа №1 по Delphi
Министерство общего и профессионального образования Владимирский Государственный Университет Кафедра УИТЭС Лабораторная работа №1 «Исследование характеристик феррорезонансного стабилизатора напряжения»
-
Компьютерная фирма
Министерство образования Российской Федерации Новосибирская Государственная Академия Экономики и Управления Кафедра экономической информатики
-
Построение и использование компьютерных моделей
Понятие компьютерной и информационной модели. Задачи компьютерного моделирования. Дедуктивный и индуктивный принципы построения моделей, технология их построения. Этапы разработки и исследования моделей на компьютере. Метод имитационного моделирования.
-
Исследование устойчивости, решение задач линейного программирования графическим способом
Строение системы уравнений-ограничений и ее переменных, графический способ решения задач линейного программирования на плоскости. Выражение неизвестных через две независимые переменные, являющиеся координатными осями графика. Значение целевой функции.
-
Моделирование электрических цепей с нелинейными элементами
Моделирование схем с резистивным нелинейным элементом. Исследование характеристик транзистора. Графический ввод, редактирование и анализ принципиальных схем в режимах анализа переходных процессов, частотного анализа и анализа в режиме постоянного тока.
-
Проектирование автоматического интерфейса ввода-вывода
Изучение и проектирование автоматического интерфейса ввода-вывода, состоящего из канала измерения в указанных пределах и канала управления напряжением в определенном диапазоне с максимальной приведенной погрешностью и ограниченным временем измерения.
-
Вариатор скорости вращения асинхронного двигателя
Регулирование скорости вращения асинхронных двигателей. Разработка структурной и функциональной схемы двигателя. Рассмотрение возможности регулирования действующего значения напряжения нагрузки в цепи переменного тока с помощью тиристорного регулятора.
-
Разработка виртуальной лабораторной работы на базе виртуальной асинхронной машины в среде MATLAB
Возможности, визуализация и графические средства MATLAB. Устройство асинхронных двигателей. Математические модели асинхронной машины. Пакет визуального программирования Simulink. Преобразование уравнений асинхронной машины в неподвижной системе координат.