Название: Основная задача механики
Вид работы: контрольная работа
Рубрика: Физика
Размер файла: 112.61 Kb
Скачать файл: referat.me-340656.docx
Краткое описание работы: Решение задачи на нахождение скорости тела в заданный момент времени, на заданном пройденном пути. Теорема об изменении кинетической энергии системы. Определение скорости и ускорения точки по уравнениям ее движения. Определение реакций опор твердого тела.
Основная задача механики
Механическая система под действием сил тяжести приходит в движение из состояния покоя, начальное положение системы показано на рис. 1. Учитывая сопротивление качению тела 3 , катящегося без скольжения, пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость тела 1 в тот момент времени, когда пройденный путь станет равным s .
В задании приняты следующие обозначения: m1 , m2 , m3, m4 – массы тел 1, 2, 3, 4; R3 – радиус большой окружности; δ – коэффициент трения качения.
Необходимые для решения данные приведены в таблице 1. Блоки и катки считать сплошными однородными цилиндрами. Наклонные участки нитей параллельны соответствующим наклонным плоскостям.
Таблица 1.
| m 1 , кг | m 2 , кг | m 3 , кг | m4 , кг | R 3 | δ , см | s , м |
| m | 1/2m | 5m | 4m | 25 | 0,20 | 2 |
Решение
Применим теорему об изменении кинетической энергии системы:
![]() (1)
(1)
где T0
и T – кинетическая энергия системы в начальном и конечном положениях; ![]() - сумма работ внешних сил, приложенных к системе;
- сумма работ внешних сил, приложенных к системе; ![]() - сумма работ внутренних сил системы.
- сумма работ внутренних сил системы.
Для рассматриваемых систем, состоящих из абсолютно твердых тел, соединенных нерастяжимыми нитями,
![]()
Так как в начальном положении система находится в покое, то Т0 =0.
Следовательно, уравнение (1) принимает вид:
![]() (2)
(2)
Кинетическая энергия рассматриваемой системы Т в конечном ее положении (рис.2) равна сумме кинетических энергий тел 1 , 2 , 3 и 4 :
Т = Т1 + Т2 + 4Т3 + Т4 . (3)
Кинетическая энергия груза 1 , движущегося поступательно,
![]() (4)
(4)
Кинетическая энергия барабана 2 , совершающего вращательное движение,
![]() , (5)
, (5)
где J2 x – момент инерции барабана 2 относительно центральной продольной оси:
![]() , (6)
, (6)
w2 – угловая скорость барабана 2 :
![]() .(7)
.(7)
После подстановки (6) и (7) в (5) выражение кинетической энергии барабана 2 принимает вид:
![]() . (8)
. (8)
Кинетическая энергия колеса 3 , совершающего плоскопараллельное движение:
![]() , (9)
, (9)
где VC 3 – скорость центра тяжести С3 барабана 3 , J3 x – момент инерции барабана 3 относительно центральной продольной оси:
![]() , (10)
, (10)
w3 – угловая скорость барабана 3 .
Мгновенный центр скоростей находится в точке СV . Поэтому
![]() , (11)
, (11)
![]() . (12)
. (12)
Подставляя (10), (11) и (12) в (9), получим:
![]() . (13)
. (13)
Кинетическая энергия груза 4 , движущегося поступательно
![]() . (14)
. (14)
Кинетическая энергия всей механической системы определяется по формуле (3) с учетом (4), (8), (13), (15):
![]()
Подставляя и заданные значения масс в (3), имеем:
![]()
или
![]() . (15)
. (15)
Найдем сумму работ всех внешних сил, приложенных к системе, на заданном ее перемещении (рис. 3).
Работа силы тяжести ![]() :
:
![]() (16)
(16)
Работа силы тяжести ![]() :
:
![]() (17)
(17)
Работа пары сил сопротивления качению ![]() :
:
![]() (18)
(18)
где
![]() (19)
(19)
![]() (20)
(20)
![]() (21)
(21)
Подставляя (19), (20) и (21) в (18), получаем:
![]() (22)
(22)
Работа силы тяжести ![]() :
:
![]() (17)
(17)
Работа силы тяжести ![]() :
:
![]() (23)
(23)
Сумма работ внешних сил определится сложением работ, вычисляемых по формулам (17) – (24):
![]() .
.
Подставляя заданные значения, получаем:
![]()
Или
![]() . (24)
. (24)
Согласно теореме (2) приравняем значения Т и ![]() , определяемые по формулам (16) и (24):
, определяемые по формулам (16) и (24):
![]() ,
,
откуда выводим
![]() м/с.
м/с.
Дано:
R2 =30; r2 =20; R3 =40; r3 =40
X=C2 t2 +C1 t+C0
При t=0 x0
=7 ![]() =0
=0
t2 =2 x2 =557 см
X0 =2C2 t+C1
C0 =7
C1 =0
557=C2 *52 +0*5+7
25C2 =557-7=550
C2 =22
X=22t2 +0t+7
![]() =V=22t
=V=22t
a=![]() =22
=22
V=r2
![]() 2
2
R2
![]() 2
=R3
2
=R3
![]() 3
3
![]() 3
=V*R2
/(r2
*R3)
=(22t)*30/20*40=0,825t
3
=V*R2
/(r2
*R3)
=(22t)*30/20*40=0,825t
![]() 3
=
3
=![]() 3
=0,825
3
=0,825
Vm
=r3
*![]() 3
=40*(0,825t)=33t
3
=40*(0,825t)=33t
at
m
=r3
![]()
![]() =0,825t
=0,825t
at
m
=R3
![]() =40*0,825t=33t
=40*0,825t=33t
an
m
=R3
![]() 2
3
=40*(0,825t)2
=40*(0,825(t)2
2
3
=40*(0,825t)2
=40*(0,825(t)2
a=![]()
***********************************
Дано :R2 =15; r2 =10; R3 =15; r3 =15
X=C2 t2 +C1 t+C0
При t=0 x0
=6 ![]() =3
=3
t2 =2 x2 =80 см
X0 =2C2 t+C1
C0 =10
C1 =7
80=C2 *22 +3*2+6
4C2 =80-6-6=68
C2 =17
X=17t2 +3t+6
![]() =V=34t+3
=V=34t+3
a=![]() =34
=34
V=r2
![]() 2
2
R2
![]() 2
=R3
2
=R3
![]() 3
3
![]() 3
=V*R2
/(r2
*R3)
=(34t+3)*15/10*15=3,4t+0,3
3
=V*R2
/(r2
*R3)
=(34t+3)*15/10*15=3,4t+0,3
![]() 3
=
3
=![]() 3
=3,4
3
=3,4
Vm
=r3
*![]() 3
=15*(3,4t+0,3)=51t+4,5
3
=15*(3,4t+0,3)=51t+4,5
at
m
=r3
![]()
![]() =3,4t
=3,4t
at
m
=R3
![]() =15*3,4t=51t
=15*3,4t=51t
an
m
=R3
![]() 2
3
=15*(3,4t+0,3)2
=15*(3,4(t+0,08)2
2
3
=15*(3,4t+0,3)2
=15*(3,4(t+0,08)2
a=![]()
Решение второй задачи механики
Дано:
m=4.5 кг; V0 =24 м/с;
R=0.5V H;
t1 =3 c;
f=0.2;
Q=9 H; Fx =3sin(2t) H.
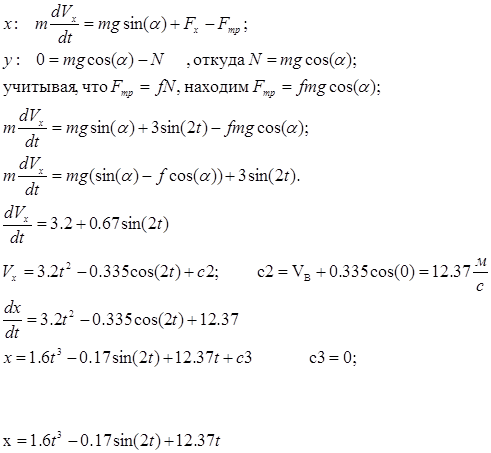
Определить: x = f(t) – закон движения груза на участке ВС
Решение:
1) Рассмотрим движение на промежутке АВ
учитывая, что R=0.5VH;
![]()
Разделяем переменные и интегрируем
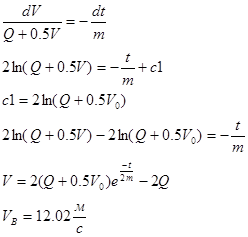
2) Рассмотрим движение на промежутке ВС (V0 =VB )
Дано:
m =36 кг
R =6 см=0,06 м
H =42 см=0,42 м
yC =1 см=0,01 м
z С =25 см=0,25 м
АВ=52 см=0,52
М=0,8 Н·м
t 1 =5 с
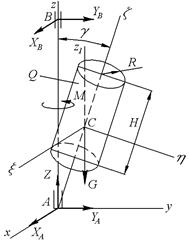
Найти реакции в опорах А и В .
Решение
Для решения задачи используем систему уравнений, вытекающую из принципа Даламбера:
 (1)
(1)
Для определения углового ускорения ε из последнего уравнения системы (1) найдем момент инерции тела относительно оси вращения z по формуле
![]() , (2)
, (2)
где Jz 1 − момент инерции тела относительно центральной оси С z 1 , параллельной оси z ; d – расстояние между осями z и z 1 .
Воспользуемся формулой
![]() , (3)
, (3)
где α , b , g - углы, составленные осью z 1 с осями x , h , z соответственно.
Так как α=90º , то
![]() . (4)
. (4)
Определим моменты инерции тела ![]() ,
, ![]() как однородного сплошного цилиндра относительно двух осей симметрии h
, z
как однородного сплошного цилиндра относительно двух осей симметрии h
, z
![]() ;
;
![]() .
.
Вычисляем
![]() ;
;
![]() .
.
Определяем угол g из соотношения
 ;
;
 ;
;
 .
.
Угол b равен
![]() ;
;
![]() .
.
По формуле (4), вычисляем
![]() .
.
Момент инерции тела относительно оси вращения z вычисляем по формуле (2):
![]() ,
,
где d = yC ;
![]() .
.
Из последнего уравнения системы (1)
 ;
;
 .
.
Угловая скорость при равноускоренном вращении тела
![]() ,
,
поэтому при ω0 =0 и t = t 1 =5 c
![]() .
.
Для определения реакций опор следует определить центробежные моменты инерции ![]() и
и ![]() тела.
тела. ![]() , так как ось х
, перпендикулярная плоскости материальной симметрии тела, является главной осью инерции в точке А
.
, так как ось х
, перпендикулярная плоскости материальной симметрии тела, является главной осью инерции в точке А
.
Центробежный момент инерции тела ![]() определим по формуле
определим по формуле
![]() ,
,
где ![]() , т.е.
, т.е.
![]() .
.
Тогда
![]() .
.
Подставляя известные величины в систему уравнений (1), получаем следующие равенства
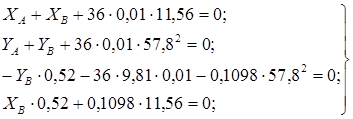
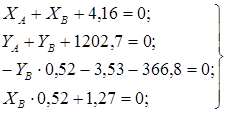
Отсюда
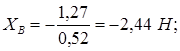
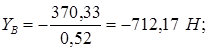
![]()
![]()
Ответ: ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Определение скорости и ускорения точки по заданным уравнениям ее движения
Задание: по заданным уравнениям движения точки М установить вид ее траектории и для момента времени t = t1 (с) найти положение точки на траектории, ее скорость, касательное и нормальное ускорения, а также радиус кривизны траектории.
Исходные данные:
x=5cos(pt2 /3); y= -5sin(pt2 /3); (1)
t1=1 (x и y – в см, t и t1 – в с).
Решение:
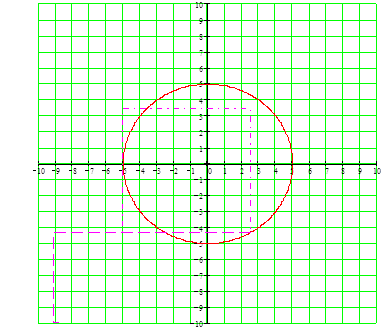
Уравнения движения (1) можно рассматривать как параметрические уравнения траектории точки. Получим уравнения траектории в координатной форме.
x2 + y2 = (5cos(pt2 /3))2 + (-5sin(pt2 /3))2 ;
Получаем x2 + y2 = 25, т. е. траекторией точки является окружность, показанная на рис. 1.
Вектор скорости точки
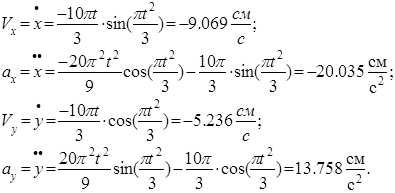
![]() (2)
(2)
Вектор ускорения точки
![]()
Здесь Vx , Vy , ax , ay – проекции скорости и ускорения точки на соответствующие оси координат.
Найдем их, дифференцируя по времени уравнения движения (1)
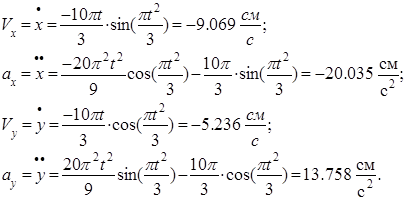 (3)
(3)
По найденным проекциям определяем модуль скорости:
V=Ö(Vx 2 + Vy 2 ); (4)
и модуль ускорения точки:
а =![]() Ö(ах
2
+ау
2
). (5)
Ö(ах
2
+ау
2
). (5)
Модуль касательного ускорения точки
аt =|dV/dt|, (6)
аt = |(Vx ax +Vy ay )/V| (6’)
Знак “+” при dV/dt означает, что движение точки ускоренное, знак “ - “ - что движение замедленное.
Модуль нормального ускорения точки
ап = V2 /p; (7)
p – радиус кривизны траектории.
Модуль нормального ускорения точки можно найти и следующим образом:
an
=![]() Ö(а2
-at
2
); (8)
Ö(а2
-at
2
); (8)
После того как найдено нормальное ускорение по формуле (8), радиус кривизны траектории в рассматриваемой точке определяется из выражения:
p=V2 / an . (9)
Результаты вычислений по формулам (3)-(6), (8), (9) для момента времени t1=1с приведены ниже в таблице
Координаты см |
Скорость см/с |
Ускорение, см/с2 | Радиус см |
|||||||
| х | у | Vx | Vy | V | ax | ay | a | at | an | p |
| 2.5 | -2.5Ö3 | -5p/Ö3 | -5p/3 | 10p/3 | -20.04 | 13.76 | 24.3 | 10.5 | 21.9 | 5 |
Ниже на рисунке показано положение точки М в заданный момент времени.
Дополнительное задание:
z=1.5tx=5cos(pt2 /3); y= -5sin(pt2 /3); t1=1 (x и y – в см, t и t1 – в с).
Найдем скорости и ускорения дифференцируя по времени уравнения движения
По найденным проекциям определяем модуль скорости:
V=Ö(Vx 2 + Vy 2 +Vz 2 );
и модуль ускорения точки:
а =![]() Ö(ах
2
+ау
2
+ аz
2
).
Ö(ах
2
+ау
2
+ аz
2
).
V=![]() ;
;
a=24.3 см/с;
Касательное ускорение точки
аt = |(Vx ax +Vy ay + Vz az )/V|
at =(-9.069*(-20.04)+(-5.24)*13.76+1.5*0)/10.58=10.36 см/с
Модуль нормального ускорения точки можно найти и следующим образом:
an
=![]() Ö(а2
-at
2
);
Ö(а2
-at
2
);
an =21.98 см/с2 .
Радиус кривизны траектории в рассматриваемой точке определяется из выражения:
p=V2 / an . р=5.1 см
Результаты вычислений для момента времени t1=1с приведены ниже в таблице
Координаты см |
Скорость см/с |
Ускорение, см/с2 | Радиус см |
||||||||||
| x | y | z | Vx | Vy | Vz | V | ax | ay | az | a | at | an | p |
| 2.5 | -4.33 | 1.5 | -9.07 | -5.24 | 1.5 | 10.58 | -20.04 | 13.76 | 0 | 24.3 | 10,36 | 21.98 | 5.1 |
Задание: точка М движется относительно тела D. По заданным уравнениям относительного движения точки М и движения тела D определить для момента времени t=t1 абсолютную скорость и абсолютное ускорение точки М.
Дано:
ОМ=Sr=120pt2 см;
jе =8t2 – 3t рад ;
t1=1/3 c; R=40 см.
Решение:
1) Положение точки М на теле D определяется расстоянием Sr =ОМ
при t=1/3 cSr =120p/9=41.89 см.
![]()
При t=1/3с Vr =80p=251.33 см/с.
ar t =d2 Sr /dt2 ar t =240p=753.98 см/с2
ar n =Vr 2 /R ar n =(80p)2 /40=1579.14 см/с2
2) Ve =we r , где r- радиус окружности, описываемой той точкой тела, с которой в данный момент совпадает точка М.
a=OM/R. r=R*sina=40*sin(p/3)=34.64 см.
wе =dje /dt=16t-3 при t=1/3 wе =7/3=2.33 с-1
Ve =80.83 см/с.
ае ц =we 2 r ае ц =188.6 см/с2 .
ае в =eе reе = d2 je /dt2 =16 с-2 ае в =554.24 см/с2 .
3) ![]()
ас =2*wе Vr sin(wе , Vr ) sin(wе , Vr )=90-a=p/6 ac =585.60 см/с2
4) 
V=Ö(Ve 2 +Vr 2 ) V=264.01 см/с
Модуль абсолютного ускорения находим методом проекций.
ax =aе в +ас
ay =arn cos(p/3)+ar t cos(p/6)
az =-ае ц - arn cos(p/6)+ar t cos(p/3)
а=Ö(ax 2 +ay 2 +az 2 )
Результаты расчетов сведены в таблицу
w e , c-1 |
Скорость см/с | e е с-2 |
Ускорение , см/с2 | ||||||||||
| Ve | Vr | V | ае ц | a е в | arn | аr t | ас | ax | ay | az | а | ||
| 2.33 | 80.8 | 251.3 | 264 | 16 | 188.6 | 554 | 1579 | 754 | 586 | 1140 | 1143 | -1179 | 1999 |
Определение реакций опор твердого тела
Дано :
Q=10 kH;
G=5 kH;
a=40 см; b=30 см; c=20 см;
R=25 см; r=15 см.
Задание:
Найти реакции опор конструкции.
Решение:
Для определения неизвестных реакций составим уравнения равновесия.
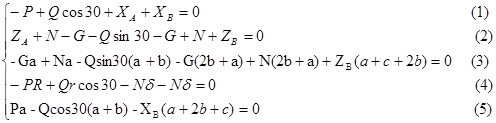
Из уравнения (4) определяем P, а затем находим остальные реакции опор. Результаты вычислений сведем в таблицу.
Силы, кН |
||||
| Р | ХА | ZA | XB | ZB |
| 5.15 | -0.17 | 2.08 | -3.34 | 2.92 |
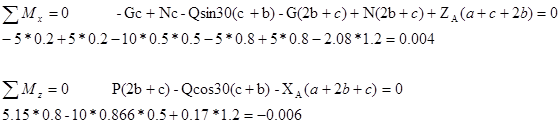
Проверка.
Составим уравнения относительно точки В.
Похожие работы
-
Действие физических сил на конструкцию
Определение реакций опор составной конструкции по системе двух тел. Способы интегрирования дифференциальных уравнений. Определение реакций опор твердого тела. Применение теоремы об изменении кинетической энергии к изучению движения механической системы.
-
Кинетическая энергия
ЭНЕРГИЯ. Цель урока: учащиеся должны знать понятие энергии, кинетической энергии и единицы ее измерения. Тип урока: комбинированный. План изучения нового материала.
-
Определение реакции опор твёрдого тела
Рассчётно -графическая работа С-7 «Определение реакции опор твёрдого тела» Cилы, кН Размеры, см Результаты вычислений приведены в таблице: Силы, кН
-
Физика. Билеты к экзамену за 9 класс
Физика 9 кл. Бровкиной Билет №1 1. Механическое движение. Система отсчета. Материальная точка. Траектория. Путь и перемещение материальной точки. 2. Лабораторная работа. Определение коэффициента трения скольжения.
-
Статика твердого тела
Составление и решение уравнения движения груза по заданным параметрам, расчет скорости тела в заданной точке с помощью диффенциальных уравнений. Определение реакций опор твердого тела для определенного способа закрепления, уравнение равновесия.
-
Реакция опор твердого тела
Порядок определения реакции опор твердого тела, используя теорему об изменении кинетической энергии системы. Вычисление угла и дальности полета лыжника по заданным параметрам его движения. Исследование колебательного движения материальной точки.
-
Определение величин по теоретической механике
Определение поступательного и вращательного движения твердого тела. Кинематический анализ плоского механизма. Применение теоремы об изменении кинетической энергии к изучению движения механической системы. Применение общего управления динамики к движению.
-
Определение реакций опор составной конструкции
Реакция опор и давление в промежуточном шарнире составной конструкции. Система уравновешивающихся сил и равновесия по частям воздействия. Применение теоремы об изменении кинетической энергии к изучению движения механической системы под действием тяжести.
-
Центр скоростей и ускорение плоскодвижущегося шатуна
Расчет мгновенного центра скоростей и центростремительного ускорения шатуна, совершающего плоское движение. Определение реакции опор для закрепления бруса, при котором Ма имеет наименьшее значение. Нахождение модуля ускорения и модуля скорости точки.
-
Интегрирование уравнений движения материальной точки, находящейся под действием переменных сил
Закон движения груза для сил тяжести и сопротивления. Определение скорости и ускорения, траектории точки по заданным уравнениям ее движения. Координатные проекции моментов сил и дифференциальные уравнения движения и реакции механизма шарового шарнира.