Название: Определение оптимального по квадратичному критерию качества программного управляющего воздействия
Вид работы: лабораторная работа
Рубрика: Информатика и программирование
Размер файла: 213.32 Kb
Скачать файл: referat.me-139550.docx
Краткое описание работы: Структурная схема объекта управления (ОУ). Граничные условия, критерий качества вида. Вид возмущающего воздействия. Аналитическое выражение оптимального программного управляющего воздействия u*(t), переводящее ОУ из начального состояния в конечное.
Определение оптимального по квадратичному критерию качества программного управляющего воздействия
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОС CИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ
ЮЖНОГО ФЕДЕРАЛЬНОГО УНИВЕРСИТЕТА В Г. ТАГАНРОГЕ
Факультет автоматики и вычислительной техники Кафедра систем автоматического управления
ИНДИВИДУАЛЬНОЕ ЗАДАНИЕ № 1
Дисциплина "Методы оптимизации"
Тема: Определение оптимального по квадратичному критерию качества программного управляющего воздействия.
Выполнил:
Ст-т гр. А-14425.10.07 г
Безродный С.В.
Проверила:
Преподаватель каф. САУ25.10.07 г
Тесленко О.А.
Таганрог 2007 г.
Вариант №5
Дано:
| ОУ | Т1 | Т2 | k1 | k2 | tk | m1 2 | m2 2 | x1 (0) | x1 (tk ) |
| 2 | - | 1,5 | 10 | 3 | 0,9 | 0,563 | 8,39 | 0 | 0,3 |
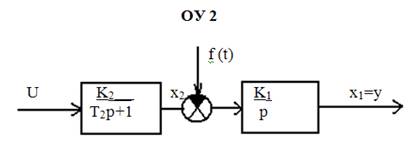
Структурная схема объекта управления (ОУ).
2. Граничные условия.
![]() ,
, ![]() (1)
(1)
3. Критерий качества вида:
 (2)
(2)
4. Вид возмущающего воздействия:
![]() (3)
(3)
Требуется определить:
Аналитическое выражение оптимального программного управляющего воздействия u* (t), переводящее ОУ из начального состояния в конечное, за конечный интервал времени t Є [0, tk ] по оптимальной траектории
x* (t) = [x1 * (t) x2 * (t)] Т .
Примечание: f (t) = 0.
Построить временные диаграммы: u* (t), x1 * (t), x2 * (t) и фазовую траекторию.
Ввести возмущающее воздействие f (t) и произвести моделирование оптимальной СУ. Построить временные диаграммы u* (t), x1 * (t), x2 * (t) и фазовую траекторию.
Примечание: амплитуду a
выбрать произвольно в разумных пределах, а частоту ω0
выбрать из интервала [ (5÷10) ·![]() ].
].
Моделирование СУ производить с помощью пакета MATLAB, программу моделирования представить в отчете.
Сделать выводы.
Выполнение работы:
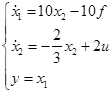
1) Математическая модель ОУ имеет вид:
Составим выражение расширенного функционала:

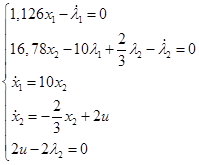
Определяем все частные производные ![]() по всем координатам и получаем систему уравнений Эйлера-Лагранжа в виде:
по всем координатам и получаем систему уравнений Эйлера-Лагранжа в виде:
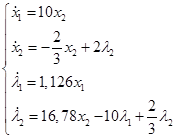
Перепишем систему в форме Коши:
Составляем матрицу коэффициентов этой системы:
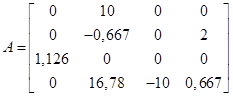
Определяем корни характеристического полинома:

![]()
![]()
Общий вид уравнений искомых экстремалей определяется однозначно, как:

Из граничных условий (1) определяем значения постоянных интегрирования:
![]()
![]()
![]()
![]()
Уравнение оптимального программного управления ![]() определяем в силу исходного ОУ с учетом выражений оптимальных программных траекторий в виде:
определяем в силу исходного ОУ с учетом выражений оптимальных программных траекторий в виде:
![]()
2) Моделирование оптимальной системы программного управления без учета возмущающего воздействия:
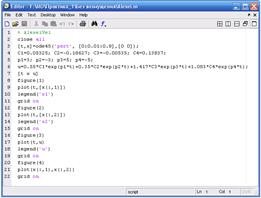
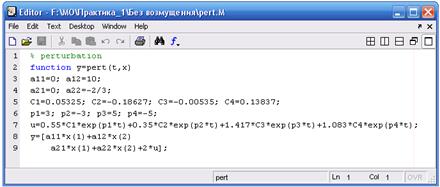
Рис.1. Листинг программы моделирования системы без учета возмущающего воздействия.
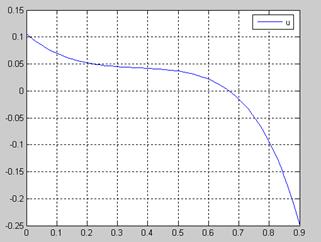
Рис.2. Оптимальное программное воздействие u (t).
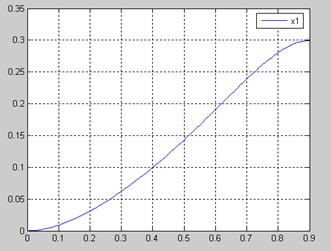
Рис.3. Переходная характеристика х1 (t).
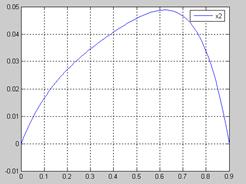
Рис.4. Переходная характеристика х2 (t).
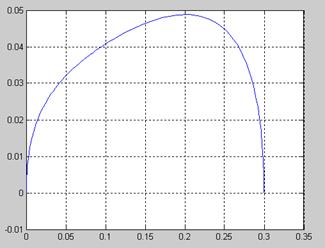
Рис.5. Фазовая траектория.
3) Моделирование оптимальной системы программного управления с учетом возмущающего воздействия:
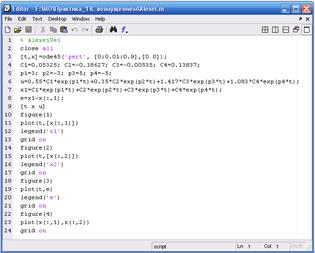
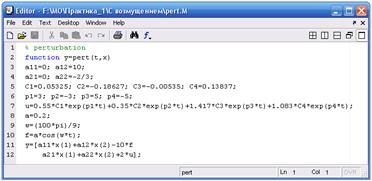
Рис.6. Листинг программы моделирования системы с учетом возмущающего воздействия.
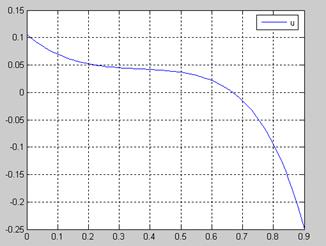
Рис.7. Оптимальное программное воздействие u (t).
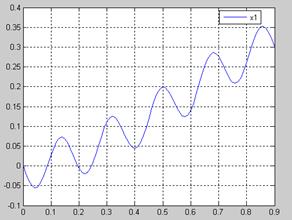
Рис.8. Переходная характеристика х1 (t).
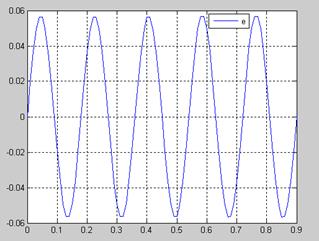
Рис.9. Отклонение истинной переходной характеристики от программной е (t).
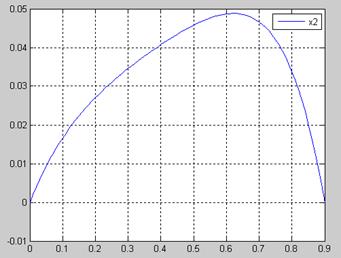
Рис.10. Переходная характеристика х2 (t).
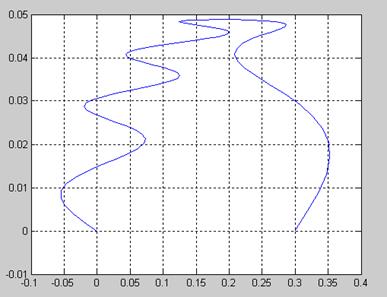
Рис.11. Фазовая траектория.
Выводы по работе
В данной работе определялось аналитическое выражение оптимального программного управляющего воздействия по квадратичному критерию качества. Из графиков рис.3. - рис.5. видно, что характер процесса - апериодический, установившаяся ошибка равна нулю, процесс перевода ОУ из начального состояния х1 (0) = х2 (0) = 0 в конечное х1 (0,9) = 0,3, х2 (0,9) = 0 происходит по оптимальной траектории, доставляя экстремум функционалу в заданный промежуток времени t = 0,9 c.
При действии на систему возмущения (3) наблюдали на рис.8. - рис.11. отклонения истинных переходных характеристик от программных, причем на рис.9. представлен график ![]() .
.
Похожие работы
-
Особенности реализации машинно-ориентированных алгоритмов расчета частотных характеристик канала воздействия
Рассмотрены проблемы формализованного анализа динамики сложных технологических объектов на базе топологических моделей. Приведены результаты машинной реализации алгоритмов расчета частотных характеристик.
-
Точность систем автоматического управления
Порядок оценки точности системы автоматического управления по величине установившейся ошибки при типовых воздействиях, механизм ее повышения. Разновидности ошибок и методика их вычисления. Определение ошибок по виду частотных характеристик системы.
-
Получение уравнения переходного процесса по передаточной функции
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ ЗАДАНИЯ ПОЛУЧЕНИЕ УРАВНЕНИЯ ПЕРЕХОДНОГО ПРОЦЕССА ПО ПЕРЕДАТОЧНОЙ ФУНКЦИИ. ЦЕЛЬ. Научиться определять уравнение переходного процесса по изображению регулируемого параметра по Лапласу.
-
Cинтез систем
Введение Управление каким-либо объектом – это процесс воздействия на него с целью обеспечения требуемого течения процессов в объекте или требуемого изменения его состояния. Основой управления является переработка информации о состоянии объекта в соответствии с целью управления.
-
Автоматическая система регулирования температуры
Функциональная схема, принцип действия и характеристики автоматической системы регулирования температуры. Статические характеристики нелинейной системы. Анализ устойчивости, моделирование и оптимизация линеаризованной системы с помощью программы Matlab.
-
Анализ одноконтурной САУ четвёртого порядка
Анализ устойчивости САУ. Расчёт частотных характеристик замкнутой САУ. Показатели качества регулирования. Синтез последовательного корректирующего устройства. Показатели качества регулирования скорректированной САУ. Моделирование скорректированной САУ.
-
Динамическое программирование и вариационное исчисление
Постановка задачи динамического программирования. Поведение динамической системы как функция начального состояния. Математическая формулировка задачи оптимального управления. Метод динамического программирования. Дискретная форма вариационной задачи.
-
Принципы построения систем автоматического управления
Теория автоматического управления как наука, предмет и методика ее изучения. Классификация систем автоматического управления по различным признакам, их математические модели. Дифференциальные уравнения систем автоматического управления, их решения.
-
Исследование системы автоматического управления
Теория автоматического управления - совокупность целесообразных действий, направленных на достижение поставленных целей. Объект управления - техническое устройство, в котором протекает управляемый процесс. Алгебраические критерии устойчивости Гурвица.
-
Автоматизированные формы
Структурная схема автоматизированной системы, передаточные функции каждого из звеньев и системы в целом, местной и общей обратной связи. Вычисление передаточной функции замкнутой и разомкнутой систем, координаты точек годографа по критерию Михайлова.