Название: Симплекс метод решения задачи линейного программирования
Вид работы: контрольная работа
Рубрика: Информатика и программирование
Размер файла: 128.79 Kb
Скачать файл: referat.me-139713.docx
Краткое описание работы: Описание симплекс метода решения задачи линейного программирования. Решение задачи методом Литла на нахождение кратчайшего пути в графе, заданном графически в виде чертежа. Из чертежа записываем матрицу расстояний и поэтапно находим кратчайший путь.
Симплекс метод решения задачи линейного программирования
Задача №1 (Симплекс метод решения задачи линейного программирования.)
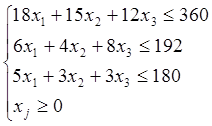
Найти Fmax = 9x1 + 10x2 + 16x3, при ограничениях:
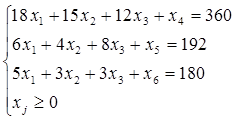
Запишем задачу в каноническом виде:
F=9x1 + 10x2 + 16x3 →max
Заполним начальную таблицу:
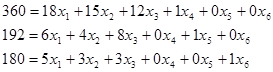
Таблица 0.
| 0 | 9 | 10 | 16 | 0 | 0 | 0 | Отношение, θ |
|||
| i | Базис | |||||||||
| 1 | 0 | 360 | 18 | 15 | 12 | 1 | 0 | 0 | 30 | |
| 2 | 0 | 192 | 6 | 4 | 8 | 0 | 1 | 0 | 24 | |
| 3 | 0 | 180 | 5 | 3 | 3 | 0 | 0 | 1 | 60 | |
| ∆j | 0 | -9 | -10 | -16 | 0 | 0 | 0 | |||
| Zj | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |||
Zj вычисляется по формуле ![]()
Оценки (∆j) вычисляются по формуле ![]() , где
, где ![]() - коэффициент из первой строки таблицы.
- коэффициент из первой строки таблицы.
Выбираем минимальную (отрицательную) оценку. Она определяет направляющий столбец.
Заполняем столбец «θ», по минимальному значению определяем направляющую строку.
На пересечение строки и столбца находится направляющий элемент.
Заполняем новую таблицу
Таблица 1.
| 0 | 9 | 10 | 16 | 0 | 0 | 0 | Отношение, θ |
|||
| i | Базис | |||||||||
| 1 | 0 | 72 | 9 | 9 | 0 | 1 | 0 | 8 | ||
| 2 | 16 | 24 | 1 | 0 | 0 | 48 | ||||
| 3 | 0 | 108 | 0 | 0 | - |
1 | 72 | |||
| ∆j | 384 | 3 | -2 | 0 | 0 | 2 | 0 | |||
| Zj | 384 | 12 | 8 | 0 | 0 | 2 | 0 | |||
Изменяется базис в позиции направляющей строки. Базисным становится вектор, соответствующий направляющему столбцу, т. е. ![]()
Столбец ![]() становится базисным, то есть единичным.
становится базисным, то есть единичным.
Новые значения в направляющей строке получаем делением элементов этой строки на направляющий элемент.
Остальные элементы в небазисных столбцах и в столбце ![]() вычисляем по правилу треугольника.
вычисляем по правилу треугольника.
Выбираем минимальную отрицательную оценку. Она определяет направляющий столбец.
Заполняем столбец «θ»
По минимальному значению определяем направляющую строку.
На пересечении направляющей строки и столбца находится направляющий элемент.
Заполнение второй таблицы осуществляется по аналогии с предыдущей.
Таблица 2.
| 0 | 9 | 10 | 16 | 0 | 0 | 0 | Отношение, θ |
|||
| i | Базис | |||||||||
| 1 | 10 | 8 | 1 | 1 | 0 | - |
0 | ______ | ||
| 2 | 16 | 20 | 0 | 1 | - |
0 | ______ | |||
| 3 | 0 | 96 | 0 | 0 | - |
1 | ______ | |||
| ∆j | 400 | 5 | 0 | 0 | 0 | |||||
| Zj | 400 | 14 | 10 | 16 | 0 | |||||
Так как нет отрицательных оценок ∆j, значит выполняется признак оптимальности и не вводились искусственные переменные, то получено оптимальное решение.
Ответ:
Максимальное значение функции Fmax =400 достигается в точке с координатами:
![]() =0
=0
![]() =8
=8
![]() =20
=20
![]() =0
=0
![]() =0
=0
![]() =96
=96
Задача №2 (Метод Литтла)
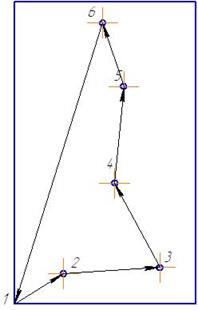
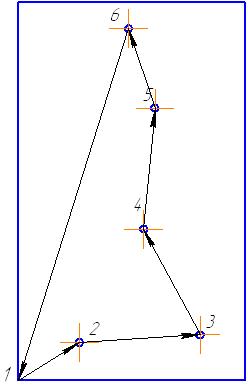
Найти кратчайший путь в графе, заданном графически в виде чертежа, методом Литтла.
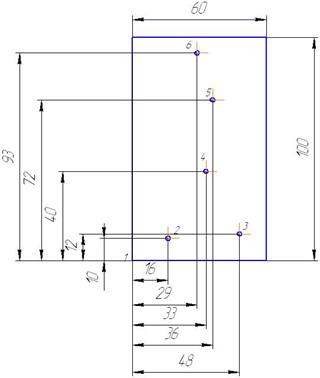
Из чертежа запишем матрицу расстояний. (Расстояние от т.1 до т.2 равно:
![]() , и т.д.)
, и т.д.)
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 1 | ∞ | 18,87 | 49,48 | 51,86 | 80,51 | 97,42 |
| 2 | 18,87 | ∞ | 32,06 | 34,48 | 65,15 | 84,01 |
| 3 | 49,48 | 32,06 | ∞ | 31,76 | 61,19 | 83,20 |
| 4 | 51,86 | 34,48 | 31,76 | ∞ | 32,14 | 53,15 |
| 5 | 80,51 | 65,15 | 61,19 | 32,14 | ∞ | 22,14 |
| 6 | 97,42 | 84,01 | 83,20 | 53,15 | 22,14 | ∞ |
Предположим что кратчайший путь будет следующим:
т.1→ т.2→ т.3→ т.4→ т.5→ т.6→т.1 и составит ![]()
Решение: Первый этап.
Шаг 1. Приведем матрицу расстояний по строкам и столбцам
(в строке вычитаем из каждого элемента минимальный, затем в столбцах)
| 1 | 2 | 3 | 4 | 5 | 6 | ||
| 1 | ∞ | 18,87 | 49,48 | 51,86 | 80,51 | 97,42 | 18,87 |
| 2 | 18,87 | ∞ | 32,06 | 34,48 | 65,15 | 84,01 | 18,87 |
| 3 | 49,48 | 32,06 | ∞ | 31,76 | 61,19 | 83,20 | 31,76 |
| 4 | 51,86 | 34,48 | 31,76 | ∞ | 32,14 | 53,15 | 31,76 |
| 5 | 80,51 | 65,15 | 61,19 | 32,14 | ∞ | 22,14 | 22,14 |
| 6 | 97,42 | 84,01 | 83,20 | 53,15 | 22,14 | ∞ | 22,14 |
↓
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 1 | ∞ | 0 | 30,61 | 32,99 | 61,64 | 78,55 |
| 2 | 0 | ∞ | 13,19 | 15,61 | 46,28 | 65,14 |
| 3 | 17,72 | 0,30 | ∞ | 0 | 29,43 | 51,44 |
| 4 | 20,10 | 2,72 | 0 | ∞ | 0,38 | 21,39 |
| 5 | 58,37 | 43,01 | 39,05 | 10,00 | ∞ | 0 |
| 6 | 75,28 | 61,87 | 61,06 | 31,01 | 0 | ∞ |
| 0 | 0 | 0 | 0 | 0 | 0 |
↓
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 1 | ∞ | 0 | 30,61 | 32,99 | 61,64 | 78,55 |
| 2 | 0 | ∞ | 13,19 | 15,61 | 46,28 | 65,14 |
| 3 | 17,72 | 0,30 | ∞ | 0 | 29,43 | 51,44 |
| 4 | 20,10 | 2,72 | 0 | ∞ | 0,38 | 21,39 |
| 5 | 58,37 | 43,01 | 39,05 | 10,00 | ∞ | 0 |
| 6 | 75,28 | 61,87 | 61,06 | 31,01 | 0 | ∞ |
Шаг 2. Определим оценки нулевых клеток:
![]()
![]()
![]()
![]()
![]()
![]()
Шаг 3. Вычеркиваем клетку с максимальной оценкой. Включаем данную клетку в путь обхода. (5 – 6)
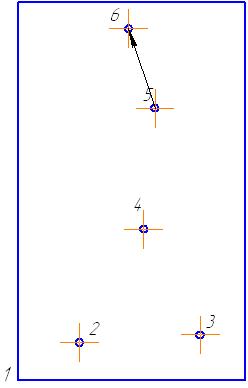
Шаг 4. Переписываем матрицу расстояний, накладывая запрет на одну из клеток для исключения преждевременного замыкания контура (в клетку 6-5 ставим ∞).
| 1 | 2 | 3 | 4 | 5 | |
| 1 | ∞ | 0 | 30,61 | 32,99 | 61,64 |
| 2 | 0 | ∞ | 13,19 | 15,61 | 46,28 |
| 3 | 17,72 | 0,30 | ∞ | 0 | 29,43 |
| 4 | 20,10 | 2,72 | 0 | ∞ | 0,38 |
| 6 | 75,28 | 61,87 | 61,06 | 31,01 | ∞ |
Далее повторяем шаги 1 – 4, пока не дойдем до одной клетки.
Второй этап.
Шаг 1. Приведем матрицу расстояний по строкам и столбцам.
| 1 | 2 | 3 | 4 | 5 | |
| 1 | ∞ | 0 | 30,61 | 32,99 | 61,64 |
| 2 | 0 | ∞ | 13,19 | 15,61 | 46,28 |
| 3 | 17,72 | 0,30 | ∞ | 0 | 29,43 |
| 4 | 20,10 | 2,72 | 0 | ∞ | 0,38 |
| 6 | 75,28 | 61,87 | 61,06 | 31,01 | ∞ |
| 0 | 0 | 0 | 0 | 0,38 |
↓
| 1 | 2 | 3 | 4 | 5 | |
| 1 | ∞ | 0 | 30,61 | 32,99 | 61,26 |
| 2 | 0 | ∞ | 13,19 | 15,61 | 45,90 |
| 3 | 17,72 | 0,30 | ∞ | 0 | 29,05 |
| 4 | 20,10 | 2,72 | 0 | ∞ | 0 |
| 6 | 75,28 | 61,87 | 61,06 | 31,01 | ∞ |
Шаг 2. Определим оценки нулевых клеток:
![]()
![]()
![]()
![]()
![]()
![]()
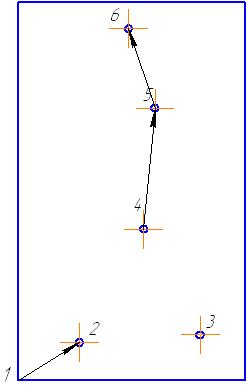
Шаг 3. Вычеркиваем клетку с максимальной оценкой. Включаем данную клетку в путь обхода. (1 – 2)

Шаг 4. Переписываем матрицу расстояний, накладывая запрет на одну из клеток для исключения преждевременного замыкания контура (в клетку 2 – 1 ставим ∞).
| 1 | 3 | 4 | 5 | |
| 2 | ∞ | 13,19 | 15,61 | 45,90 |
| 3 | 17,72 | ∞ | 0 | 29,05 |
| 4 | 20,10 | 0 | ∞ | 0 |
| 6 | 75,28 | 61,06 | 31,01 | ∞ |
Третий этап.
Шаг 1. Приведем матрицу расстояний по строкам и столбцам.
| 1 | 3 | 4 | 5 | |
| 2 | ∞ | 13,19 | 15,61 | 45,90 |
| 3 | 17,72 | ∞ | 0 | 29,05 |
| 4 | 20,10 | 0 | ∞ | 0 |
| 6 | 75,28 | 61,06 | 31,01 | ∞ |
| 17,72 | 0 | 0 | 0 |
↓
| 1 | 3 | 4 | 5 | ||
| 2 | ∞ | 13,19 | 15,61 | 45,90 | 13,19 |
| 3 | 0 | ∞ | 0 | 29,05 | 0 |
| 4 | 2,38 | 0 | ∞ | 0 | 0 |
| 6 | 57,56 | 61,06 | 31,01 | ∞ | 31,01 |
↓
| 1 | 3 | 4 | 5 | |
| 2 | ∞ | 0 | 2,42 | 32,71 |
| 3 | 0 | ∞ | 0 | 29,05 |
| 4 | 2,38 | 0 | ∞ | 0 |
| 6 | 26,55 | 30,05 | 0 | ∞ |
Шаг 2. Определим оценки нулевых клеток:
![]()
![]()
![]()
![]()
![]()
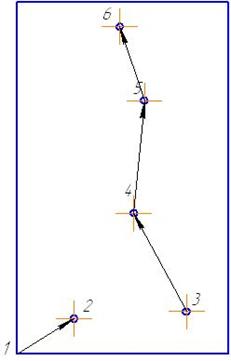
Шаг 3. Вычеркиваем клетку с максимальной оценкой. Включаем данную клетку в путь обхода. (4 – 5)
Шаг 4. Переписываем матрицу расстояний, накладывая запрет на одну из клеток для исключения преждевременного замыкания контура (в клетку 6 – 4 ставим ∞).
| 1 | 3 | 4 | |
| 2 | ∞ | 0 | 2,42 |
| 3 | 0 | ∞ | 0 |
| 6 | 26,55 | 30,05 | ∞ |
Четвертый этап.
Шаг 1. Приведем матрицу расстояний по строкам и столбцам.
| 1 | 3 | 4 | ||
| 2 | ∞ | 0 | 2,42 | 0 |
| 3 | 0 | ∞ | 0 | 0 |
| 6 | 26,55 | 30,05 | ∞ | 26,55 |
↓
| 1 | 3 | 4 | |
| 2 | ∞ | 0 | 2,42 |
| 3 | 0 | ∞ | 0 |
| 6 | 0 | 3,50 | ∞ |
Шаг 2. Определим оценки нулевых клеток:
![]()
Шаг 3. Вычеркиваем клетку с максимальной оценкой. Включаем данную клетку в путь обхода. (3 – 4)
Шаг 4. Переписываем матрицу расстояний, накладывая запрет на одну из клеток для исключения преждевременного замыкания контура (в клетку 6 – 3 ставим ∞).
| 1 | 3 | |
| 2 | ∞ | 0 |
| 6 | 0 | ∞ |
Пятый этап.
Остались не задействованными связи 2 – 3 и 6 – 1.
В результате получаем следующую цепочку:
1→ 2→ 3 → 4→ 5→ 6 →1
Длина пути составляет:
L=18,87+32,06+31,76+32,14+22,14+97,42=234,39
это и есть кратчайший путь.
Похожие работы
-
Применение симплекс-метода
Сущность и описание симплекс-метода и улучшенного симплекс-метода (метода обратной матрицы), преимущества и недостатки их применения в линейном прогаммировании. Листинг и блок-схема программы на языке Turbo Pascal для решения математической задачи.
-
Табличный симплекс-метод
Математическое программирование. Табличный симплекс – метод. Метод искусственного базиса. Формирование целевой функции и системы ограничений. Статус ресурсов.
-
Исследование устойчивости, решение задач линейного программирования графическим способом
Строение системы уравнений-ограничений и ее переменных, графический способ решения задач линейного программирования на плоскости. Выражение неизвестных через две независимые переменные, являющиеся координатными осями графика. Значение целевой функции.
-
Программная реализация симплекс-метода
Методы решения задач линейного программирования. Вектор коэффициентов целевой функции. Простой однооконный интерфейс с набором всех необходимых инструментов для работы с программой. Структура программного модуля. Автоматический режим работы программы.
-
Решение задач линейного программирования симплекс-методом
Сущность линейного программирования. Математическая формулировка задачи ЛП и алгоритм ее решения с помощью симплекс-метода. Разработка программы для планирования производства с целью обеспечения максимальной прибыли: блок-схема, листинг, результаты.
-
Регрессионные зависимости
Вычисление значений регрессионно-авторегрессионной зависимости заданного выражения линейного программирования. Графическое представление математической модели в виде уравнения регрессии. Принципи оптимизации производственных и коммерческих операций.
-
Математическое программирование
Решение задачи линейного программирования симплекс-методом. Нахождение оптимального плана по критерию максимума прибыли. Транспорт - определение плана перевозок грузов на предприятие, которое обеспечивает минимальные совокупные транспортные издержки.
-
Решение задачи оптимального управления
Математические основы оптимизации. Постановка задачи оптимизации. Методы оптимизации. Решение задачи классическим симплекс методом. Графический метод. Решение задач с помощью Excel. Коэффициенты целевой функции. Линейное программирование, метод, задачи.
-
Решение задач нелинейного программирования
Решение задачи нелинейного программирования с определением экстремумов функции. Этапы процесса нахождения решения задачи нелинейного программирования с использованием ее геометрической интерпретации. Определение гиперповерхности уровней функции.
-
Исследование операций
Математическая модель задачи. Система ограничений. Составление симплекс-таблиц. Разрешающий элемент. Линейное программирование. Коэффициенты при свободных членах. Целевая функция. Метод потенциалов, северо-западного угла. Выпуклость, вогнутость функции.