Название: Анализ дискретной системы
Вид работы: курсовая работа
Рубрика: Коммуникации и связь
Размер файла: 131.42 Kb
Скачать файл: referat.me-167951.docx
Краткое описание работы: Новосибирская государственная академия водного транспорта Кафедра информационных систем Курсовая работа на тему "Анализ дискретной системы"
Анализ дискретной системы
Новосибирская государственная академия водного транспорта
Кафедра информационных систем
Курсовая работа на тему "Анализ дискретной системы"
по дисциплине "Математические модели данных, сигналов и систем"
Выполнил студент
Абросимов М.В.
Проверил
преподаватель Голышев Д.Н.
2010
Ключевые слова:
АЧХ, ФЧХ, амплитуда, колебание, импульсную характеристику, система каузальная, алгоритм, дискретная система, система, индекс, период, чистота, устойчивость, фаза.
Объем работы: 17стр.
Количество графиков: 5 рисунков
Использованная литература: 5 источников
Цель работы:
Ознакомиться с системными функциями линейных систем. Приобрести практические навыки анализа дискретной линейной системы.
а0:=1 а1:=1 а2:=1 а3:=1 b1:=0,5 b2:=0,3
Содержание
Введение
Пояснительная записка
Задание I. Разностное уравнение системы
Задание II. Импульсная характеристика
Задание III. Переходная характеристика
Задание IV. Импульсная характеристика
Задание V. Системная функция дискретной системы
Задание VI. АЧХ и ФЧХ
Задание VII. Устойчивость системы
Заключение
Список литературы
Введение
Многоскоростная обработка сигналов (multirate processing) предполагает, что в процессе преобразования цифровых сигналов возможно изменение частоты дискретизации в сторону уменьшения или увеличения и, как следствие, требуемой скорости обработки. Это приводит к более эффективной обработке сигналов, так как открывается возможность значительного уменьшения требуемой вычислительной производительности проектируемой цифровой системы. В последние годы в области многоскоростной обработки сигналов достигнуты громадные успехи. Многоскоростная фильтрация и особенности ее применения стали предметом исследований многочисленных научных работ по цифровой обработке сигналов (ЦОС). Появились десятки монографий и учебных пособий, так или иначе связанных с научными и практическими достижениями в этой области. Совершенно уникальные возможности дает использование многоскоростной обработки в системах адаптивной и нелинейной фильтрации, сжатия, анализа и восстановления речи, звука и изображений.
Пояснительная записка

Предполагается, что на вход системы поступают входные дискретные сигналы x (n ), реакцию на которые называют выходом системы y (n ). Здесь n – это номер дискретного отчета n = 0, 1, 2, 3 …
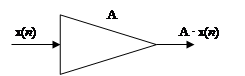
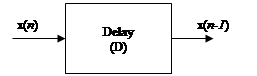
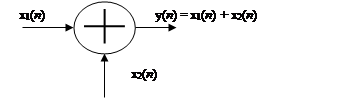
Основные конструктивные элементы дискретных систем.
1. Умножение сигнала на константу А.
2. Задержка сигнала на один отчет n (интервал времени, равный шагу дискретизации сигнала Td ).
3. Сумматор сигналов.
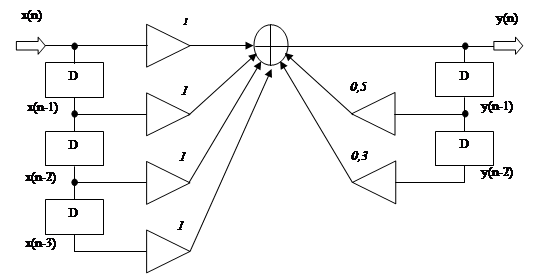
Задание I . Разностное уравнение системы
Найдем разностное уравнение системы – это зависимость между дискретными сигналами x (n ) и y (n ).
Для данной схемы получим
y ( n )= x ( n )+ x ( n -1)+ x ( n -2)+ x ( n -3)+0,5* y ( n -1)+0,3* y ( n -2)
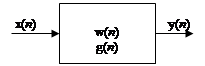
По аналогии с непрерывной системой дискретная система во временной области описывается 2 характеристиками: импульсной (весовой) w(n ) и переходной g(n ).
Задание II . Импульсная характеристика
Найдем импульсную характеристику – это реакция системы на входное воздействие в виде дискретной дельта-функции δ (n ), т.е.
если x (n ) = δ (n ), то y (n ) = w (n ), где
![]() .
.
Получим для нашей системы
w ( n )=1* δ ( n )+1* δ ( n -1)+1* δ ( n -2)+1* δ ( n -3)+0,5* w ( n -1)+0,3* w ( n -2)
При этом мы предполагаем, что наша система каузальная или физически реализуемая , что означает, что реакция (отклик) системы не может наступить раньше подачи входного сигнала.
Т.к. входной сигнал подается в момент n = 0, то импульсная характеристика должна быть равна w(n ) = 0 при отрицательных значениях n .
При n = 0 импульсная характеристика системы будет равна
w(0)=δ(0)+δ(0-1)+δ(0-2)+δ(0-3)+0,5*w(0-1)+0,3*w(0-2)
w(0)=1+0+0+0+0+0=1
При n = 1 импульсная характеристика системы будет равна
w(1)=δ(1)+δ(1-1)+δ(1-2)+δ(1-3)+0,5*w(1-1)+0,3*w(1-2)
w(1)=0+1+0+0,5+0=1,5
При n = 2 импульсная характеристика системы будет равна
w(2)=δ(2)+δ(2-1)+δ(2-2)+δ(2-3)+0,5*w(2-1)+0,3*w(2-2)
w(2)=0+0+1+0+(0,5*1,5)+1=2,05
При n = 3 импульсная характеристика системы будет равна
w(3)=δ(3)+δ(3-1)+δ(3-2)+δ(3-3)+0,5*w(3-1)+0,3*w(3-2)
w(3)=0+0+0+1+0,5*2,05+0,3*1,5=2,47
При n = 4 импульсная характеристика системы будет равна
w(4)=δ(4)+δ(4-1)+δ(4-2)+δ(4-3)+0,5*w(4-1)+0,3*w(4-2)
w(4)=0+0+0+0+0,5*2,47+0,3*2,05=1,85
При n = 5 импульсная характеристика системы будет равна
w(5)=δ(5)+δ(5-1)+δ(5-2)+δ(5-3)+0,5*w(5-1)+0,3*w(5-2)
w(5)=0+0+0+0+0,5*1,85+0,3*2,47=1,66
При n = 6 импульсная характеристика системы будет равна
w(6)=δ(6)+δ(6-1)+δ(6-2)+δ(6-3)+0,5*w(6-1)+0,3*w(6-2)
w(6)=0+0+0+0+0,5*1,66+0,3*1,85=1,38
При n = 7 импульсная характеристика системы будет равна
w(7)=δ(7)+δ(7-1)+δ(7-2)+δ(7-3)+0,5*w(7-1)+0,3*w(7-2)
w(7)=0+0+0+0+0,5*1,38+0,3*1,66=1,19
При n = 8 импульсная характеристика системы будет равна
w(8)=δ(8)+δ(8-1)+δ(8-2)+δ(8-3)+0,5*w(8-1)+0,3*w(8-2)
w(8)=0+0+0+0+0,5*1,19+0,3*1,38=1,01
При n = 9 импульсная характеристика системы будет равна
w(9)=δ(1)+δ(9-1)+δ(9-2)+δ(9-3)+0,5*w(9-1)+0,3*w(9-2)
w(9)=0+0+0+0+0,5*1,01+0,3*1,19=0,86
При n = 10 импульсная характеристика системы будет равна
w(10)=δ(10)+δ(10-1)+δ(10-2)+δ(10-3)+0,5*w(10-1)+0,3*w(10-2)
w(10)=0+0+0+0+0,5*0,86+0,3*1,01=0,73
При n = 11импульсная характеристика системы будет равна
w(11)=δ(11)+δ(11-1)+δ(11-2)+δ(11-3)+0,5*w(11-1)+0,3*w(11-2)
w(11)=0+0+0+0+0,5*0,73+0,3*0,86=0,62
При n = 12 импульсная характеристика системы будет равна
w(12)=δ(12)+δ(12-1)+δ(12-2)+δ(12-3)+0,5*w(12-1)+0,3*w(12-2)
w(12)= 0+0+0+0+0,5*0,62+0,3*0,73=0,53
При n = 13 импульсная характеристика системы будет равна
w(13)=δ(13)+δ(13-1)+δ(13-2)+δ(13-3)+0,5*w(13-1)+0,3*w(13-2)
w(13)=0+0+0+0+0,5*0,53+0,3*0,62=0,45
При n = 14 импульсная характеристика системы будет равна
w(14)=δ(14)+δ(14-1)+δ(14-2)+δ(14-3)+0,5*w(14-1)+0,3*w(14-2)
w(14)=0+0+0+0+0,5*0,45+0,3*0,52=0,38
При n = 14 импульсная характеристика системы будет равна
w(15)=δ(15)+δ(15-1)+δ(15-2)+δ(15-3)+0,5*w(15-1)+0,3*w(15-2)
w(15)=0+0+0+0+0,5*0,38+0,3*0,45=0,32
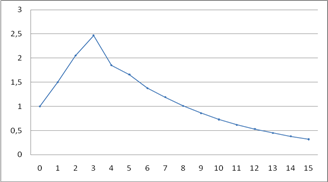
Рисунок 1: импульсная характеристика
Задание III . Переходная характеристика
Найдем переходную характеристику – это реакция системы на входное воздействие в виде дискретной функции единичного скачка, т.е.
если x (n ) = h (n ), то y (n ) = g (n ), где
![]()
Получим для нашей системы
g ( n )=1* h ( n )+1* h ( n -1)+1* h ( n -2)+1* h ( n -3)+0,5* g ( n -1)+0,3* g ( n -2)
При этом мы предполагаем, что наша система каузальная или физически реализуемая , что означает, что переходная характеристика должна быть равна g(n ) = 0 при отрицательных значениях n .
При n = 0 переходная характеристика системы будет равна
g(0)=h(0)+h(0-1)+h(0-2)+h(0-3)+0,5*g(0-1)+0,3*g(0-2)
g(0)=1+0+0+0+0+0=1
При n = 1 переходная характеристика системы будет равна
g(1)=h(1)+h(1-1)+h(1-2)+h(1-3)+0,5*g(1-1)+0,3*g(1-2)
g(1)=1+1+0+0+0,5+0=2,5
При n = 2 переходная характеристика системы будет равна
g(2)=h(2)+h(2-1)+h(2-2)+h(2-3)+0,5*g(2-1)+0,3*g(2-2)
g(2)=1+1+1+0+0,5*2,5+0,3=4,55
При n = 3 переходная характеристика системы будет равна
g(3)=h(3)+h(3-1)+h(3-2)+h(3-3)+0,5*g(3-1)+0,3*g(3-2)
g(3)=1+1+1+1+0,5*4,55+0,3*2,5=7,02
При n = 4 переходная характеристика системы будет равна
g(4)=h(4)+h(4-1)+h(4-2)+h(4-3)+0,5*g(4-1)+0,3*g(4-2)
g(4)=1+1+1+1+0,5*7,02+0,3*4,55=8,87
При n = 5 переходная характеристика системы будет равна
g(5)=h(5)+h(5-1)+h(5-2)+h(5-3)+0,5*g(5-1)+0,3*g(5-2)
g(5)= 1+1+1+1+0,5*8,87+0,3*7,02=10,54
При n = 6 переходная характеристика системы будет равна
g(6)=h(6)+h(6-1)+h(6-2)+h(6-3)+0,5*g(6-1)+0,3*g(6-2)
g(6)= 1+1+1+1+0,5*10,54+0,3*8,87=11,93
При n = 7 переходная характеристика системы будет равна
g(7)=h(7)+h(7-1)+h(7-2)+h(7-3)+0,5*g(7-1)+0,3*g(7-2)
g(7)= 1+1+1+1+0,5*11,93+0,3*10,54=13,12
При n = 8 переходная характеристика системы будет равна
g(8)=h(8)+h(8-1)+h(8-2)+h(8-3)+0,5*g(8-1)+0,3*g(8-2)
g(8)= 1+1+1+1+0,5*13,12+0,3*11,93=14,13
При n = 9 переходная характеристика системы будет равна
g(9)=h(9)+h(9-1)+h(9-2)+h(9-3)+0,5*g(9-1)+0,3*g(9-2)
g(9)= 1+1+1+1+0,5*14,13+0,3*13,12=15,0
При n = 10 переходная характеристика системы будет равна
g(10)=h(10)+h(10-1)+h(10-2)+h(10-3)+0,5*g(10-1)+0,3*g(10-2)
g(10)= 1+1+1+1+0,5*15,0+0,3*14,13=15,73
При n = 11 переходная характеристика системы будет равна
g(11)=h(11)+h(11-1)+h(11-2)+h(11-3)+0,5*g(11-1)+0,3*g(11-2)
g(11)= 1+1+1+1+0,5*15,73+0,3*15,0=16,36
При n = 12 переходная характеристика системы будет равна
g(12)=h(12)+h(12-1)+h(12-2)+h(12-3)+0,5*g(12-1)+0,3*g(12-2)
g(12)= 1+1+1+1+0,5*16,36+0,3*15,73=16,90
При n = 13 переходная характеристика системы будет равна
g(13)=h(13)+h(13-1)+h(13-2)+h(13-3)+0,5*g(13-1)+0,3*g(13-2)
g(13)= 1+1+1+1+0,5*16,90+0,3*16,36=17,36
При n = 14 переходная характеристика системы будет равна
g(14)=h(14)+h(14-1)+h(14-2)+h(14-3)+0,5*g(14-1)+0,3*g(14-2)
g(14)= 1+1+1+1+0,5*17,36+0,3*16,90=17,75
При n = 15 переходная характеристика системы будет равна
g(15)=h(15)+h(15-1)+h(15-2)+h(15-3)+0,5*g(15-1)+0,3*g(15-2)
g(15)= 1+1+1+1+0,5*17,75+0,3*17,36=18,08
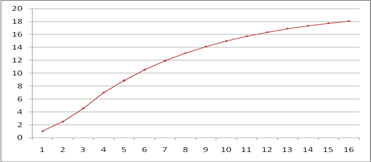
Рисунок 2: переходная характеристика
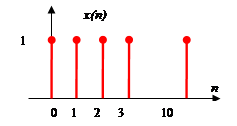
Задание IV . Импульсная характеристика
Найдем отклик системы на входное воздействие следующего вида
![]() .
.
y(n)=1*x(n)+1*x(n-1)+1*x(n-2)+1*x(n-3)+0,5*y(n-1)+0,3*y(n-2)
При n = 0 выходной сигнал системы будет равна
y(0)=x(0)+ x(0-1)+x(0-2)+x(0-3)+0,5*y(0-1)+0,3*y(0-2)
y(0)=1+0+0+0+0+0=1
При n = 1 выходной сигнал системы будет равна
y(1)=x(1)+x(1-1)+x(1-2)-x(1-3)+0,5*x(1-1)+0,3*x(1-2)
y(1)=1+1+0+0+0,5+0=2,5
При n = 2 выходной сигнал системы будет равна
y(2)=x(2)+x(2-1)+x(2-2)+x(2-3)+0,5*y(2-1)+0,3*y(2-2)
y(2)=1+1+1+0+0,5*2,5+0,3=4,55
При n = 3 выходной сигнал системы будет равна
y(3)=x(3)+x(3-1)+x(3-2)+x(3-3)+0,5*y(3-1)+0,3*y(3-2)
y(3)=1+1+1+1+0,5*4,55+0,3*2,5=7,02
При n = 4 выходной сигнал системы будет равна
y(4)=x(4)+x(4-1)+x(4-2)+x(4-3)+0,5*y(4-1)+0,3*y(4-2)
y(4)=1+1+1+1+0,5*7,02+0,3*4,55=8,87
При n = 5 выходной сигнал системы будет равна
y(5)=x(5)+x(5-1)+x(5-2)+x(5-3)+0,5*x(5-1)+0,3*x(5-2)
y(5)=1+1+1+1+0,5*8,87+0,3*7,02=10,54
При n = 6 выходной сигнал системы будет равна
y(6)=x(6)+x(6-1)+x(6-2)+x(6-3)+0,5*y(6-1)+0,3*y(6-2)
y(6)= 1+1+1+1+0,5*10,54+0,3*8,87=11,93
При n = 7 выходной сигнал системы будет равна
y(7)=x(7)+x(7-1)+x(7-2)+x(7-3)+0,5*y(7-1)+0,3*y(7-2)
y(7)= 1+1+1+1+0,5*11,93+0,3*10,54=13,12
При n = 8 выходной сигнал системы будет равна
y(8)=x(8)+x(8-1)+x(8-2)+x(8-3)+0,5*y(8-1)+0,3*y(8-2)
y(8)= 1+1+1+1+0,5*13,12+0,3*11,93=14,13
При n = 9 выходной сигнал системы будет равна
y(9)=x(9)+x(9-1)+x(9-2)+x(9-3)+0,5*y(9-1)+0,3*y(9-2)
y(9)= 1+1+1+1+0,5*14,13+0,3*13,12=15,0
При n = 10 выходной сигнал системы будет равна
y(10)=x(10)+x(10-1)+x(10-2)+x(10-3)+0,5*y(10-1)+0,3*y(10-2)
y(10)= 1+1+1+1+0,5*15,0+0,3*14,13=15,73
При n = 11 выходной сигнал системы будет равна
y(11)=x(11)+x(11-1)+x(11-2)+x(11-3)+0,5*y(11-1)+0,3*y(11-2)
y(11)=0+1+1+1+0,5*15,73+0,3*15,0=15,36
При n = 12 выходной сигнал системы будет равна
y(12)=x(12)+x(12-1)+x(12-2)+x(12-3)+0,5*y(12-1)+0,3*y(12-2)
y(12)=0+0+1+1+0,5*15,36+0,3*15,73=14,40
При n = 13 выходной сигнал системы будет равна
y(13)=x(13)+x(13-1)+x(13-2)+x(13-3)+0,5*y(13-1)+0,3*y(13-2)
y(13)=0+0+0+1+0,5*14,40+0,3*15,36=12,81
При n = 14 выходной сигнал системы будет равна
y(14)=x(14)+x(14-1)+x(14-2)+x(14-3)+0,5*y(14-1)+0,3*y(14-2)
y(14)=0+0+0+0+0,5*12,81+0,3*14,40=10,72
При n = 15 выходной сигнал системы будет равна
y(15)=x(15)+0*x(15-1)+x(15-2)+x(15-3)+0,5*y(15-1)+0,3*y(15-2)
y(15)=0+0+0+0+0,5*10,72+0,3*12,81=9,20
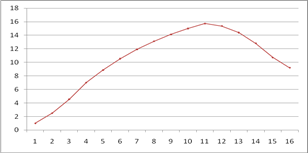
Рисунок 3: выходной сигнал
Задание V . Системная функция дискретной системы
Найдем системную функцию дискретной системы .
Преобразуем разностное уравнение из области отчетов n в область некоторой комплексной переменной z по следующим правилам:
![]() ,
, ![]() ,
, ![]() и т.д.
и т.д.
Тогда получим
y(n)=1*x(n)+1*x(n-1)+1*x(n-2)+1*x(n-3)+0,5*y(n-1)+0,3*y(n-2)
y(z)=1*x(z)+1*x(z)*z-1 +1*x(z)*z-2 +1*x(z)z-3 +0,5*y(z)*z-1 +0,3*y(z)*z-2
Системная функция W(z ) – это отношение выходного и входного сигналов в области z , равная
![]() .
.
Разделим наше выражение на X(Z)
Тогда получим:
w(z)=1+z-1 +z-2 +z-3 +0,5*w(z)*z-1 +0,3*w(z)*z-2
отсюда получим конечное выражение
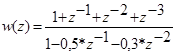
Задание VI . АЧХ и ФЧХ
Найдем амплитудно-частотную и фазово-частотную характеристику системы (АЧХ и ФЧХ) .
Для вычисления АЧХ и ФЧХ используем программу MathCad
Зададим коэффициенты системы
а0:=1
а1:=1
а2:=1
а3:=1
b1:=0,5
b2:=0,3
L:=10
ω:=-L,-L+0.05..L
j:=![]()
Передаточная функция системы

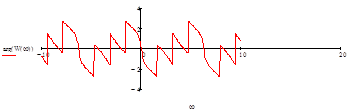
Рисунок 4: АЧX
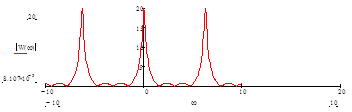
Рисунок 5: ФЧХ
Обратим внимание, что обе частотные характеристики являются периодическими функциями с периодом повторения, равном частоте дискретизации
 ,
,
где Td – это шаг дискретизации сигнала.
Задание VII . Устойчивость системы
Оценим устойчивость системы
Понятие устойчивости системы связано с ее способностью возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели ее из этого состояния.
Естественно, что существует граница устойчивости – это мощность силы, выведшей систему из состояния равновесия.
Для этих целей необходимо вычислить полюса системной функции W(z ), т.е. такие значения z , при которых знаменатель системной функции равен нулю. Получим
1-0,5*z-1 -0,3*z-2 =0
Умножим правую и левую часть на z2
Z2 -0,5*z-0,3=0
Z1;2
=![]()
Z1;2 =0.85;-0.35
Если хотя бы одно из полученных значений корня ![]() , то система считается неустойчивой
Z1
=0.85<1
, то система считается неустойчивой
Z1
=0.85<1
Данная система устойчива.
Вывод
Мы ознакомились с системными функциями линейных систем. Приобрели практические навыки анализа дискретной линейной системы, научились строить графики АЧХ и ФЧХ с помощью программы MathCad.
Подводя общий итог проведенных выше исследований, можно утверждать что наша система неустойчива.
Список литературы
1. Основы цифровой обработки сигналов . Курс лекций / А.И. Солонина, Д.А. Улахович, С.М. Арбузов и др. – СПб.: БХВ-Петербург, 2003. – 608 с.
2. Голышев Н.В. , Щетинин Ю.И. Теория и обработка сигналов. Учеб. пособие. – Новосибирск, Изд-во НГТУ, 1998. – Ч.1. – 103 с.
3. Голышев Н.В. , Щетинин Ю.И. Теория и обработка сигналов. Учеб. пособие. – Новосибирск, Изд-во НГТУ, 1998. – Ч.2. – 115 с.
4. Сиберт У.М. Цепи, сигналы, системы. – М.: Мир, 1988. – Ч.1. – 336с.
5. Сиберт У.М. Цепи, сигналы, системы. – М.: Мир, 1988. – Ч.2. – 360с.
Похожие работы
-
Системы с прерывистым входным сигналом. Математическое описание дискретных систем
Использование импульсного сигнала в качестве носителя информации (сканирование диаграммы направленности или переключение процесса слежения с одного объекта на другой и т.д.). Функциональные схемы следящих систем при наличии прерываний входного сигнала.
-
Расчет регулятора одноконтурной САУ
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ ОДЕССКАЯ НАЦИОНАЛЬНАЯ МОРСКАЯ АКАДЕМИЯ Кафедра ТАУ и ВТ Курсовая работа на тему: " Расчет регулятора одноконтурной САУ"
-
Исследование частотных свойств линейных динамических звеньев
Министерство образования и науки Украины Донбасская Государственная Машиностроительная Академия Кафедра АПП Лабораторная работа по дисциплине "Теория автоматического управления"
-
Частотные характеристики дискретных систем управления
Предмет: Теория Автоматического Управления Тема: Частотные характеристики дискретных систем управления 1. Частотное представление дискретного сигнала
-
Расчет цифрового корректора
Контрольная работа студентов-заочников по дисциплине «Цифровая обработка сигналов» Расчет цифрового корректора Задан канал передачи дискретных сообщений. Межсигнальная
-
Анализ качества дискретных систем управления
Реферат Предмет: Теория автоматического управления Тема: Анализ качества дискретных систем управления Методы определения качества дискретных систем автоматического управления аналогичны методам определения качества непрерывных систем с учетом некоторых особенностей.
-
Устойчивость дискретных систем управления
Основные понятия устойчивости дискретных систем. Критерий устойчивости Михайлова с использованием билинейного преобразования. Определение устойчивости дискретных систем в форме z-преобразования. Применение критериев устойчивости для дискретных систем.
-
Расчет переходных процессов в дискретных системах управления
Соотношение между входным и выходным сигналом дискретной системы автоматического управления. Дискретное преобразование единичного воздействия, функция веса дискретной системы. Определение связи между переходной и функцией веса дискретной системы.
-
Дискретные системы радиоавтоматики
Передаточные функции дискретных систем как отношение z-изображений выходной и входной величин при нулевых начальных условиях. Определение передаточной функции дискретной системы при нулевом значении флюктуационной составляющей. Использование фиксатора.
-
Расчет переходных процессов в линейных цепях с сосредоточенными параметрами
Министерство транспорта Российской Федерации Федеральное Государственное Образовательное Учреждение Государственная Морская Академия имени адмирала С.О. Макарова