Название: Расчет регулятора одноконтурной САУ
Вид работы: курсовая работа
Рубрика: Коммуникации и связь
Размер файла: 452.73 Kb
Скачать файл: referat.me-170897.docx
Краткое описание работы: МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ ОДЕССКАЯ НАЦИОНАЛЬНАЯ МОРСКАЯ АКАДЕМИЯ Кафедра ТАУ и ВТ Курсовая работа на тему: " Расчет регулятора одноконтурной САУ"
Расчет регулятора одноконтурной САУ
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ОДЕССКАЯ НАЦИОНАЛЬНАЯ МОРСКАЯ АКАДЕМИЯ
Кафедра ТАУ и ВТ
7
Курсовая работа
на тему:
"Расчет регулятора одноконтурной САУ"
Выполнил :
курсант 3-го курса
факультета автоматики
группы 2231
Матвиенко Д.В.
Проверил:
Поповский А.Ю.
Одесса 2010
Часть I. Идентификация объекта управления
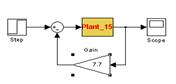
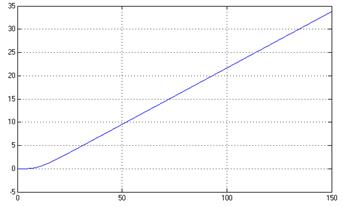
Заданный ОУ (рис.1.1) подвергаем воздействию тестового сигнала в виде ступенчатого изменения, и получаем разгонную характеристику:
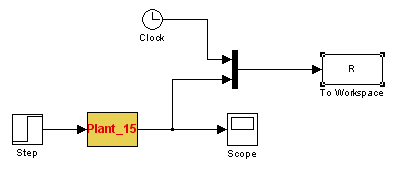
Рис.1.1
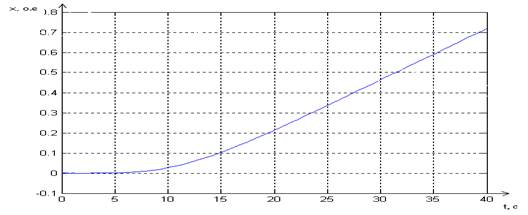
Рис.1.2
По разгонной характеристике (рис.1.2) видно, что данный объект управления - нейтральный, его можно представить последовательным соединением идеального интегрирующего звена и звена ИТЗ:
![]()
Процедура уточненной аппроксимации ОУ, представленного соединением идеального интегрирующего звена и звена ИТЗ:


![]()
Проверка точности идентификации (рис.2.1):
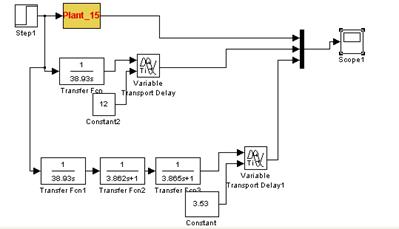
Рис.2.1
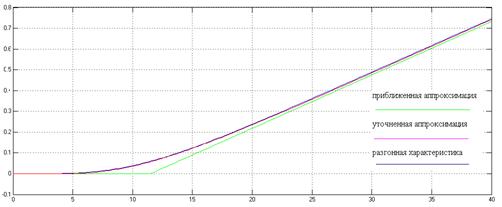
Рис.2.2
График (рис.2.2) уточненной аппроксимации точно совпадает с графиком приближенной аппроксимации и разгонной характеристикой объекта, что свидетельствует о правильном расчете;
Часть II. Расчет и оптимизация настроек непрерывного регулятора
Передаточная функция регулятора будет записываться в виде следующего выражения для ПИ-регулятора:
Для поиска настроек ПИ-регулятора в данном случае используется эмпирический метод Циглера - Никольса:
Тип регулятора - ПИД
Тип объекта - нейтральный
![]()
![]() (с)
(с)
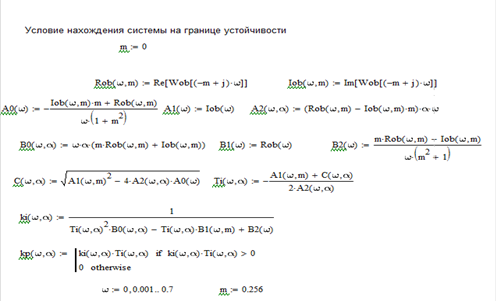
Расчет настроек ПИД-регулятора частотным методом. Задача найти настройки, соответствующие min I2 при заданном:

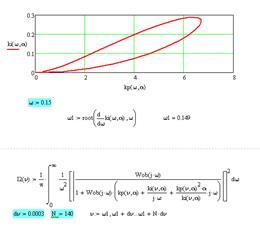
![]()

Часть III. Анализ процессов в замкнутой САР
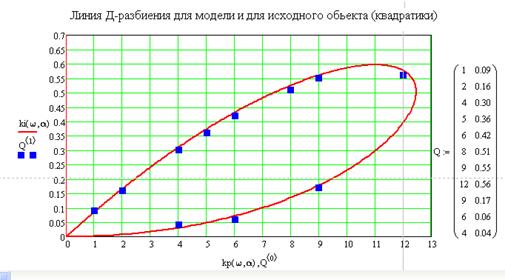
Построение линии Д-разбиения, разделяющей устойчивый объект по модели (уточненной) и найденной на объекте:
Исследуем данную систему на робастность. Для этого построим диаграмму Боде и найдем запасы устойчивости системы для проверки робастности системы. Листинг Matlab документа имеет вид:
>> T=38.93; T1=3.862; T2=3.865; tau=3.531;% параметры передаточной функции ОУ
>> kp=6.629; Ti=27.158; Td=5.432;% Параметры ПИД-регулятора
>> s=tf ('s'); Wob=exp (-tau*s) / (T*s* (T1*s+1) * (T2*s+1));% передаточная функция ОУ
>>Wreg=kp* (1+1/ (Ti*s) +Td*s);% передаточная функция регулятора
>>Wraz=Wreg*Wob;% передаточная функция разомкнутой системы
>> om=logspace (-3,0,100);% Задание диапазона и числа точек изменения частоты
>> bode (Wraz,om)
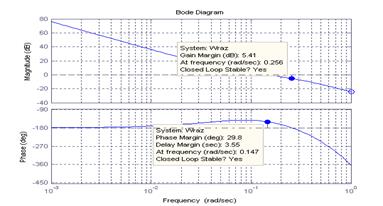
Рис.3
Из диаграммы Боде (рис.3) видно, что замкнутая система обладает робастностью, т.е. достаточной устойчивостью как по фазе - 29,8о , так и по уровню - 5.41 дБ. Система может оставаться работоспособной при изменении условий функционирования.
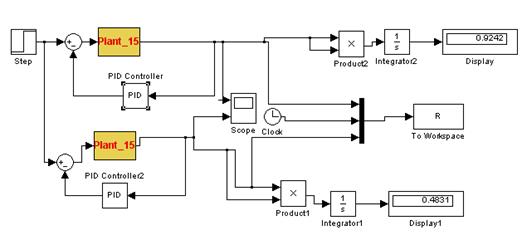
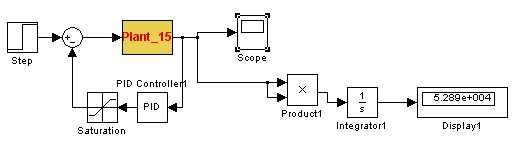
S-модель исследования процессов в замкнутой САР.
Проведем анализ замкнутой системы состоящей из объекта и регулятора, настроенного двумя методами - частотным и инженерным:
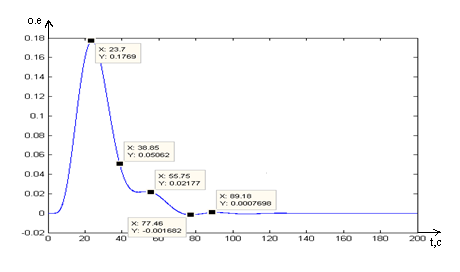
Переходной процесс в замкнутой системе, с регулятором настроенным частотным методом:
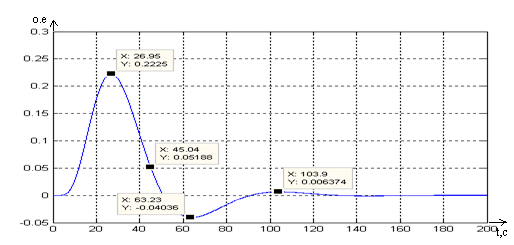
Переходной процесс в замкнутой системе, с регулятором настроенным инженерным методом:
| Значения настроек |
Колебательность Ψ,% |
Динамический заброс s,% |
Время регулирования |
Квадратичный ИКК |
| Инж. метод |
2.8 |
18.1 |
45.04 |
0.9242 |
| Частотный метод |
12.3 |
0.9 |
38.65 |
0.4831 |
Величина квадратичного ИКК, произведенная инженерным методом, оказывается ниже, чем аналогичная у регулятора с настройками частотным методом. Это связано с тем, что настройки уточненным (частотным) способом удовлетворяют дополнительному требованию по величине колебательности в переходном процессе.
Расчет настроек переоборудованного цифрового регулятора:
Для построения дискретной модели ПИ-регулятора используется преобразование Тастина:
![]() ,
,
соответствующее интегрированию по методу трапеций.
Период квантования сигнала:
Для реализации замены регулятора используем возможности пакетов компьютерной математики. Так, в частности, листинг команд в пакете Matlab будет иметь вид:
Ti=27.158; kp=6.629; Td=5.432;
T=0.1;
W1d=c2d (tf ([Td 1],1),T,'tustin'); W2d=c2d (tf (1, [Ti 0]),T,'zoh');
Wd=kp* (W1d+W2d)
Transfer function:
59.58 z^2 - 105.6 z + 46.66
-------------------------
z^2 - 1
Sampling time: 1.36
Ti=27.158; kp=6.629; Td=5.432;
T=0.5;
W1d=c2d (tf ([Td 1],1),T,'tustin'); W2d=c2d (tf (1, [Ti 0]),T,'zoh');
Wd=kp* (W1d+W2d)
Transfer function:
150.7 z^2 - 287.9 z + 137.5
-------------------------
z^2 - 1
Sampling time: 0.5
Ti=27.158; kp=6.629; Td=5.432;
T=20;
W1d=c2d (tf ([Td 1],1),T,'tustin'); W2d=c2d (tf (1, [Ti 0]),T,'zoh');
Wd=kp* (W1d+W2d)
Transfer function:
10.23 z^2 - 2.32 z + 1.854
------------------------
z^2 + 1.11e-016 z - 1
Sampling time: 20
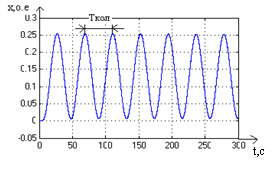
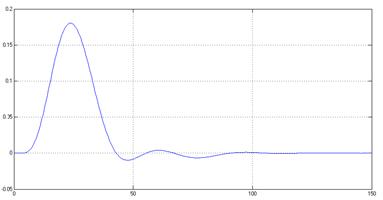
Изучение влияния насыщения
Вид переходного процесса при окончательном значении выходного уровня 0.1
Рис.3.1
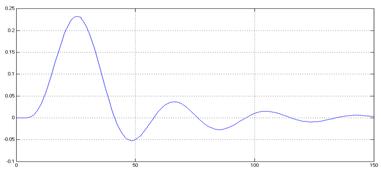
Вид переходного процесса при окончательном значении выходного уровня 0.4
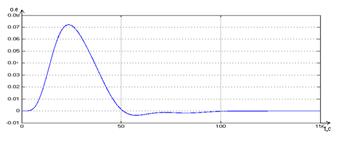
Рис 3.2
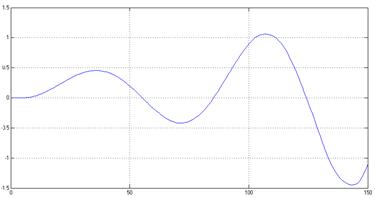
Вид переходного процесса при окончательном значении выходного уровня 1.5
3.2а
При значении выходного уровня больше 1.5, вид переходного процесса не изменяется.
S-модель замкнутой САР с цифровым и аналоговым регуляторами:
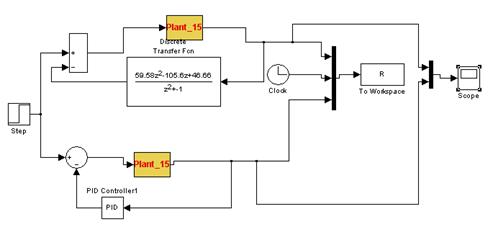
График переходного процесса в замкнутой САР:
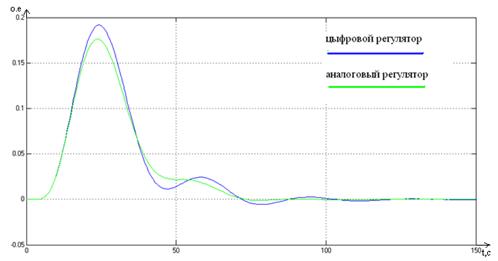
Рис.3.3
Переходные процессы в САР (рис.3.3) с цифровым и аналоговым регуляторами.
Исследуем, как изменится качество переходного процесса при изменении времени квантования САР:
T=0.5
Рис.3.4
T=5
Рис.3.5
Т=20
Рис.3.6
При уменьшении времени квантования уменьшается колебательность процесса, длительность процесса, а также динамический заброс. При увеличении времени квантования процесс становится затянутым, увеличивается длительность процесса. При сильном увеличении времени квантования процесс становится неустойчивым.
Выводы
В курсовой работе необходимо было по заданному объекту с неизвестными параметрами выполнить его идентификацию, аппроксимацию и рассчитать для него регулятор различными методами. Аппроксимация выполнялась двумя методами: инженерным и уточненным. Инженерный метод позволил достаточно приближенно определить параметры объекта в отличии от уточненного метода, однако при этом не требуется сложных расчетов. Далее выполнялся расчет настроек непрерывного ПИД-регулятора с помощью инженерного (эмпирический метод Циглера-Никольса) и частотного методов. Расчет цифрового регулятора позволил определить, что качество переходного процесса в системе с цифровым регулятором несколько хуже. Однако у цифрового регулятора есть свои преимущества: его легче реализовать и повышая степень дискретизации можно добиться требуемого качества процесса.
Список литературы
1. Теория автоматического управления Ч. II. Теория нелинейных и специальных систем автоматического управления. Под ред. А.А. Воронова. Учеб. пособие для вузов. М., Высш. школа, 1977, 288с.
2. Методические указания по выполнению курсовой работы по дисциплине "Теория автоматического управления". Составил Поповский А.Ю.
Похожие работы
-
Расчет настроек автоматического регулятора 2
Министерство общего и профессионального образования РФ Пермский государственный технический университет Березниковский филиал Курсовая работа
-
Расчет настроек автоматического регулятора
Пермский Государственный Технический Университет Курсовая работа по предмету: Автоматизация технологических процессов и производств. Тема: Расчет настроек автоматического регулятора.
-
Исследование частотных свойств линейных динамических звеньев
Министерство образования и науки Украины Донбасская Государственная Машиностроительная Академия Кафедра АПП Лабораторная работа по дисциплине "Теория автоматического управления"
-
Расчет структурно-алгоритмической схемы системы автоматического регулирования
Получение структурно-алгоритмической схемы системы автоматического регулирования по заданным математическим моделям. Построение кривых Михайлова и Найквиста. Расчет настроек регулятора, обеспечивающих минимальное значение интегральной оценки качества.
-
Средства отображения информации
Обоснование выбора типа индикатора в соответствии с режимом стробирования. Построение буферной микросхемы. Расчет формирователей строк или столбцов. Синтез знакогенератора. Характеристики германиевого транзистора. Выбор резисторов по номинальному ряду.
-
Исследование системы управления подводного аппарата по вертикальной координате
Характеристика управления подводного аппарата по разомкнутому контуру, путём подачи на двигатель постоянного напряжения. Статическая характеристика двигателя. Методы построения регулятора высоты подводного аппарата. Изучение релейной схемы управления.
-
Теорії лінійних одноконтурних автоматичних систем регулювання
Визначення перехідної функції об’єкта керування. Побудова кривої розгону об’єкта. Обчислення і побудова комплексно-частотної характеристики (КЧХ) об’єкта. Побудова КЧХ розімкнутої автоматичної системи регулювання. Запас сталості за модулем і фазою.
-
Разработка и исследование системы автоматического регулирования температуры электропечи на базе промышленного регулятора Р-111
Система автоматического регулирования температуры жидкости в термостате на основе промышленного цифрового регулятора ТРМ-10. Система стабилизации температуры. Нагрев изделий до заданной температуры, соответствующей требованиям технического процесса.
-
Проектирование судового радиоприёмного устройства
Расчет полосы пропускании общего радиотракта приемника. Выбор числа преобразований частоты и номиналов промежуточных частот. Структурная схема приемника. Распределение избирательности и усиления по трактам. Определение коэффициента шума приемника.
-
Расчет переходных процессов в линейных цепях с сосредоточенными параметрами
Министерство транспорта Российской Федерации Федеральное Государственное Образовательное Учреждение Государственная Морская Академия имени адмирала С.О. Макарова