Название: Оптимизация режимов резания на фрезерном станке
Вид работы: курсовая работа
Рубрика: Промышленность и производство
Размер файла: 238.18 Kb
Скачать файл: referat.me-304018.docx
Краткое описание работы: Тольяттинский Государственный Университет Кафедра “Технология машиностроения” Курсовая работа по дисциплине “Математическое моделирование"
Оптимизация режимов резания на фрезерном станке
Тольяттинский Государственный Университет
Кафедра “Технология машиностроения”
Курсовая работа
по дисциплине
“Математическое моделирование"
Студент: Комарова И.О.
Группа: М-401
Преподаватель: Бобровский А.В.
Тольятти, 2005
Оптимизация режимов резания
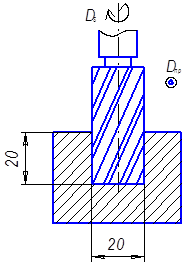
Обработка детали ведется на вертикально-фрезерном станке 6Р12 концевой фрезой с цилиндрическим хвостовиком ГОСТ 17025-71.
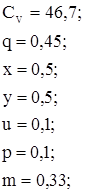
Диаметр фрезы D = 20 мм; количество зубьев z = 6; материал инструмента Р6М5; период стойкости инструмента [Т] = 80 мин; глубина фрезерования t = 20 мм; ширина фрезерования В = 20 мм; рабочий ход Lрх = 70 мм; материал заготовки ШХ15; длина заготовки L = 60 мм; шероховатость поверхности Ra6,3; частота вращения шпинделя станка n = 31,5…1600 об/мин; скорость продольных подач Sпр = 25…1250 мм/мин; мощность электродвигателя Nэ = 7,5 кВт.
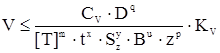
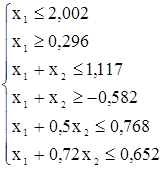
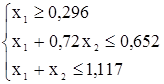
Необходимо оптимизировать процесс резания с учетом следующих ограничений:
1) ограничение по кинематике станка;
2) ограничение по периоду стойкости инструмента;
3) ограничение по мощности привода главного движения станка.
Эскиз обработки:
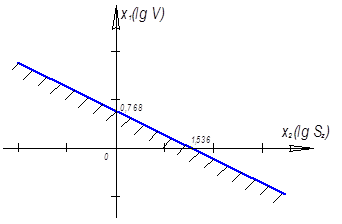
1. Графический метод
1) ограничение по кинематике станка
а) ![]()
 ;
; ![]() ;
;
 ;
; ![]() ;
;
![]()
б) ![]()
![]() ;
; ![]() ;
;
![]() ;
;
2) ограничение по периоду стойкости инструмента
![]() ;
;
 ;
;
![]() ;
;

 ;
;
 ;
;
![]() ;
;
![]() ;
; ![]() .
.
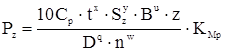
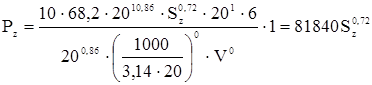
3) ограничение по мощности главного движения станка
![]() ;
; ![]()
![]()
 ;
; ![]()
 ;
;
 ;
;
![]() ;
; ![]() ;
; ![]() ;
;
![]()
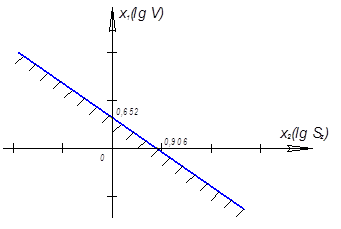
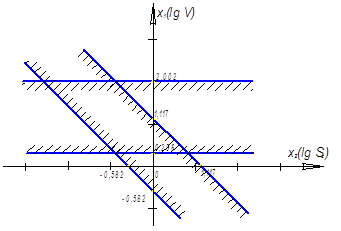
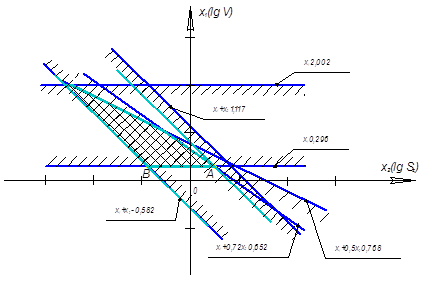
Выпишем все ограничения, а затем внесем их на один график.
Критерий оптимальности - целевая функция:

![]()
![]()
Придаем любое значение z и строим две прямые, касающиеся области оптимальных режимов резания в двух крайних ее точках. Таким образом, мы нашли точки А и В.
Найдем координаты точки А. Для этого необходимо решить систему уравнений:
 ;
;
![]() ;
; ![]()
Подставим координаты точки А в уравнение целевой функции:
![]()
Найдем координаты точки В. Для этого необходимо решить систему уравнений:
 ;
;
![]() ;
; ![]()
Подставим координаты точки В в уравнение целевой функции:
![]()
Сравним значения целевой функции для точек А и В:
![]()
![]()
Значит, оптимальной точкой резания является точка А (0,296; - 0,494).
Определим оптимальные значения режимов резания:
V= 10x1 = 100,296 = 1,977 м/мин;
Sz = 10x2 = 10-0,494 = 0,321 мм/зуб;
 об/мин;
об/мин;
![]() мм/мин.
мм/мин.
2. Симплекс-метод
Решить систему уравнений:
Найти значения, при которых целевая функция
![]() .
.
Приведем все знаки к одному направлению:
Для перехода от системы неравенств, вводим в систему уравнений единичную матрицу. Расширенная форма записи:
 ;
;
![]() .
.
Находим расширенную матрицу, матрицу свободных членов и матрицу коэффициентов при базисных переменных:
![]() .
.
Выбираем исходный базис. Запишем матрицу коэффициентов при базисных переменных:
Найдем определитель матрицы коэффициентов при базисных переменных:
Находим союзную матрицу:
Находим транспонированную матрицу:
Находим обратную матрицу:
Находим решение исходного базиса:
 ;
;
![]() .
.
Базисное решение является допустимым, т.к все его значения положительные.
Вычислим симплекс-разности для всех переменных, не вошедших в базис:
 ;
;

Симплекс разности отрицательны, следовательно, найдено оптимальное решение: ![]() Вывод: результаты, полученные графическим и симплекс-методом совпали, значит задача решена правильно.
Вывод: результаты, полученные графическим и симплекс-методом совпали, значит задача решена правильно.
3. Симплекс-таблицы. Решить систему уравнений:
Найти значения, при которых целевая функция
![]() .
.
Приведем все знаки к одному направлению:
Для перехода от системы неравенств, вводим в систему уравнений единичную матрицу. Расширенная форма записи:
 ;
; ![]() .
.
Приведем систему уравнений к виду, где выделены базисные переменные:
![]()
По последней записи системы уравнений и целевой функции построим таблицу 1.
После нахождения разрешающего элемента в таблице 1, переходим к заполнению таблицы 2. После построения таблицы 2 в последней строке имеется положительный элемент, значит оптимальное решение не найдено.
Определяем разрешающий элемент в таблице 2 и переходим к заполнению таблицы 3.
Таблица 3.
| Таблица 1 | Таблица 2 | Таблица 3 | ||||||||||
СН БН |
СЧ | х1 | х2 | СН БН |
СЧ | x4 | x2 | СН БН |
СЧ | x4 | x3 | |
| x3 | -0,296 | -1 | 1 | x3 | 0,356 | 1 | 0,72 | x2 | 0,494 | 1,388 | 1,388 | |
| x4 | 0,652 | 1 | 0,72 | x1 | 0,652 | 1 | 0,72 | x1 | 0,296 | 0 | -1 | |
| x5 | 1,117 | 1 | 1 | x5 | 0,465 | -1 | 0,28 | x5 | 0,327 | -1,388 | -0,388 | |
| zmin | -0,135 | 1 | 1 | zmin | -0,787 | -1 | 0,28 | zmin | -0,925 | -1,388 | -0,388 | |
В таблице 3 все элементы последней строки отрицательны, значит оптимальное решение найдено:
![]() .
.
Вывод: результаты, полученные графическим методом и методом симплекс-таблиц совпали, значит, задача решена правильно.
Похожие работы
-
Параметрическая оптимизация систем управления
Многокритериальная параметрическая оптимизация систем управления К У Р С О В А Я Р А Б О Т А - по дисциплине: - «Проектирование систем управления» Задание
-
Технология механической обработки вала
Министерство образования и науки Украины ПГАСА Кафедра Эксплуатации и ремонта машин РАСЧЕТНО-ГРАФИЧЕСКАЯ РАБОТА по дисциплине “Технологические основы машиностроения "
-
Оптимальная последовательность обработки деталей на двух и четырех станках
Министерство Образования Российской Федерации Тольяттинский государственный университет Кафедра “Технология машиностроения” Отчет о практических работах
-
Рассчитать основные размеры бражной колонны
Министерство образования и науки Российской Федерации Федеральное агентство по образованию ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра органической химии и пищевой технологии
-
Метрологическое обеспечение аппарата химической промышленности при высоких требованиях к основны
Федеральное агентство по образованию РФ ТОЛЬЯТТИНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ Кафедра химии Контрольная работа по дисциплине "Метрология, стандартизация и сертификация"
-
Динамический расчет вертикально-фрезерного и токарного станков
Министерство Образования Российской Федерации Тольяттинский государственный университет Кафедра “Технология машиностроения” Отчет о практических работах по
-
Расчет и проектирование универсального сборного приспособления
ТОЛЬЯТТИНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ Кафедра "Технология машиностроения" КУРСОВАЯ РАБОТА по дисциплине "Технологическая оснастка"
-
Система автоматического управления стабилизации уровня вибраций
Построение элементарной схемы и исследование принципа работы системы автоматического управления, ее значение в реализации способа поднастройки системы СПИД. Основные элементы системы и их взаимосвязь. Анализ устойчивости контура и его оптимальных частот.
-
Расчет алгоритма управления АСУ
Кривая разгона. Динамические параметры и математическое описание кривой разгона. Алгоритм управления. Выбор переходного процесса и настройки параметров алгоритмов управления АСУ. Регулирование в программе SIMULINC. Оптимизация переходного процесса.
-
Процесс фрезерования
Динамический расчет вертикально-фрезерного станка 675 П. Расчет обработки вала ступенчатого. Динамическая модель основных характеристик токарно-винторезного станка 16Б16А. Определение прогиба вала, параметров резца, режимов резания и фрезерования.