Название: Процесс фрезерования
Вид работы: лабораторная работа
Рубрика: Промышленность и производство
Размер файла: 78.6 Kb
Скачать файл: referat.me-299157.docx
Краткое описание работы: Динамический расчет вертикально-фрезерного станка 675 П. Расчет обработки вала ступенчатого. Динамическая модель основных характеристик токарно-винторезного станка 16Б16А. Определение прогиба вала, параметров резца, режимов резания и фрезерования.
Процесс фрезерования
Министерство Образования Российской Федерации
Тольяттинский Государственный Университет
Кафедра «Технология машиностроения»
Отчет о практических работах
Вариант № 4
Студент Брагина Е.О
Группа ТМ-402
Преподаватель Бобровский А.В
Тольятти, 2006г.
Задача № 1
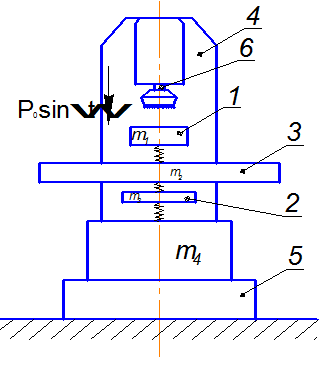
Динамический расчет вертикально-фрезерного станка 675 П
Дано:
1. приспособление
2. стол станка
3. салазки
4. консоль
5. станина
6. шпиндель
| j | 1 | 2 | 3 | 4 |
| kj , Н/м | 8,5·107 | 2,6·107 | 3,2·107 | 4,9·107 |
| mj , кг. | 150 | 510 | 270 | 1060 |
Обрабатываемый материал: сталь.
Фреза торцевая Т15К6 D=100 04.2.059.000-00 ТУ 2-0,35-874-82
Sz =0,5 мм z=8 t=1 мм B=50 мм.
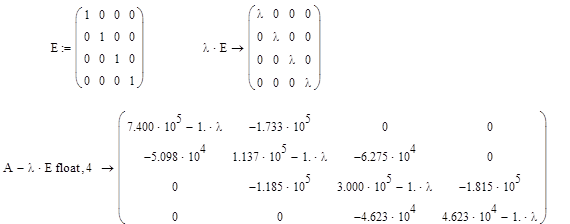
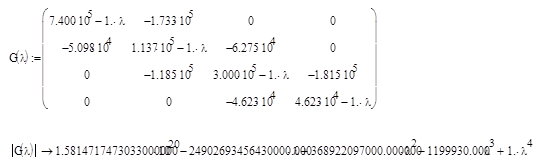
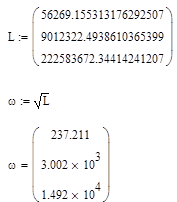
Найти: собственные частоты каждой составляющей. Для каждой из частот определить собственные значения.
Решение
Уравнение динамического равновесия любой системы:
[М]·{Z}= [K]·{Z}=0 (1.1)
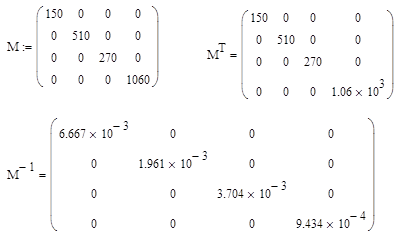
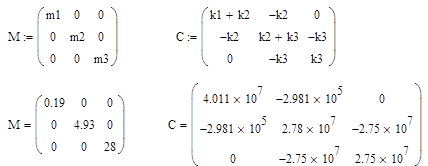
Решая это уравнение, получаем матрицу масс, где основное условие:
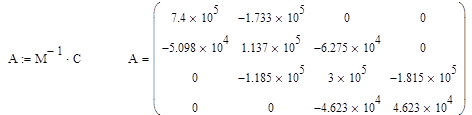
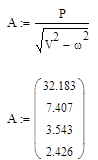
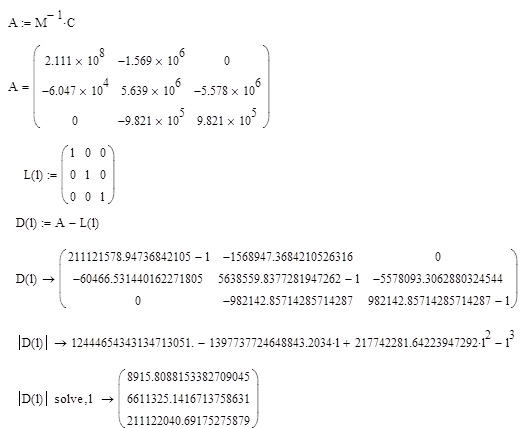
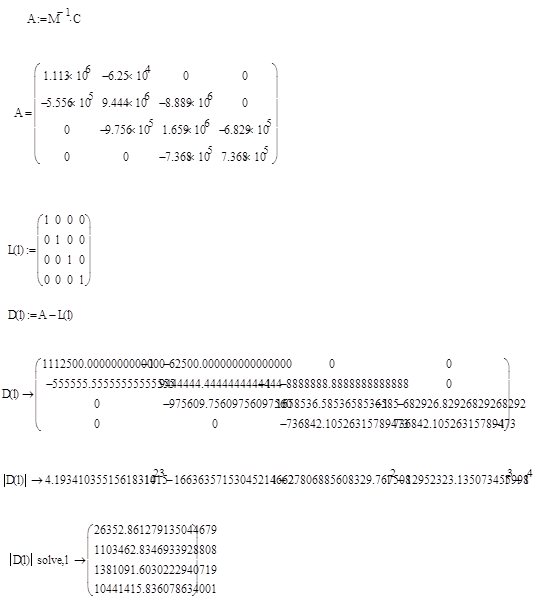
[A]= [M]-1 ·[C] (1.2)
[A] - динамическая масса,
[M] – матрица масс системы,
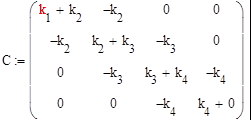
[C] – матрица жесткостей системы.
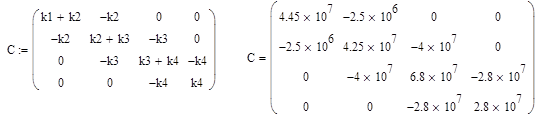
ki +ki+1 , при i=j (j=1…n+1)
С={Сi;j }= -ki , при i=j-1 (j=2..n)
-ki , при j=i-1 (i=2..n)
0, при всех остальных
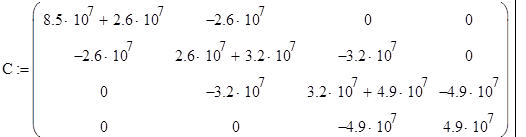
Полученные значения подставляем в формулу (1.2)

Процесс фрезерования
v=![]() (1.3)
(1.3)
Cv =332
t=1 мм
Sz =0,5 мм/зуб
B=50 мм
z=8
D=100 мм
x=0,1
y=0,4
u=0,2
q=0,2
m=0,2
р=0
T=180 мин.
Kv = Кm u ×Кn u ×Кu u =1·0,8·1= 0,8
v=![]() 142 м/мин,
142 м/мин,
n=![]() (1.4)
(1.4)
n=![]() =452 об/мин. → nстанд
=500 об/мин
=452 об/мин. → nстанд
=500 об/мин
Pz
=![]() (1.5)
(1.5)
Cp =825
t=1 мм
Sz =0,5 мм/зуб
B=50 мм
z=8
D=100 мм
n=500 об/мин
x=1
y=0,75
u=1,1
q=1,3
w=0,2
Kmp =1
Pz
=![]() =2103 Н.
=2103 Н.
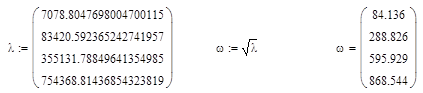
ω=![]() рад/с.
рад/с.
Амплитуда для каждой составляющей
Задача № 2
Динамический расчет обработки вала ступенчатого
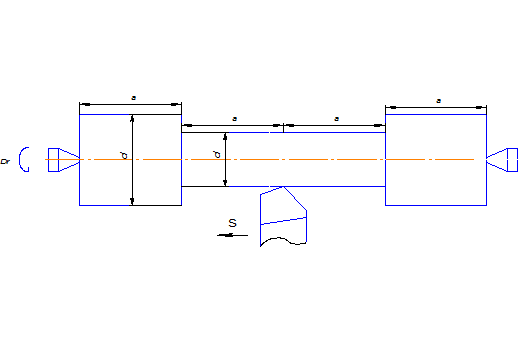
Дано
a=0,2 м,
d1 =0,04 м,
d2 =0,02 м,
e=0,05 мм
Емат =2,15·1011 Па,
jлюнета =2,75·107 Н/м,
mлюнета =28 кг
Найти: собственные частоты, резонансные амплитуды.
Решение: Определяем жесткость детали в точке, где находится резец.
Jj=![]()
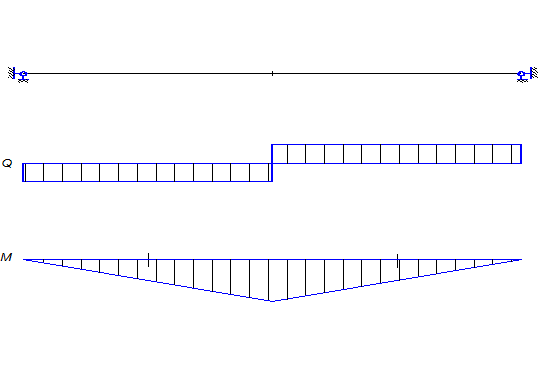
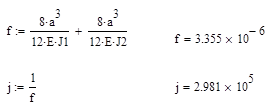
Определяем прогиб вала
f=
![]() (2.1)
(2.1)
J1
=![]() 1,257·10-7
м4
1,257·10-7
м4
J2
=![]() 7,854·10-9
м4
7,854·10-9
м4
Масса вала
m=![]() =4,93 кг.
=4,93 кг.
Параметры резца
b×h×L=20×20×60 мм.
J=![]()
![]() =1,33·10-8
м4
=1,33·10-8
м4
j=![]() H/м
H/м
Масса: m=ρ×b×h×L =0,1884 кг
Динамический расчет
Режимы резания
tmax =t + e=1,55 мм
tmin =t - e=1,45 мм
v=![]() (2.2)
(2.2)
Cv =340
t=1,5 мм
S=1 мм/об
m=0,2
x=0,15
y=0,45
T=60 мин.
Kv = Кm u ×Кn u ×Кu u =1·0,9·1,15= 1,035
v=![]() 146 м/мин,
146 м/мин,
n=![]() (2.3)
(2.3)
n=![]() =2324 об/мин. → nстанд
=2000 об/мин
=2324 об/мин. → nстанд
=2000 об/мин
ω=![]() рад/с.
рад/с.
Vреал
=![]() м/мин
м/мин
Pz
=![]() (2.4)
(2.4)
Cp =300
t=1,5 мм
S=1 мм
y=0,75
х=1
n=-0,15
![]() =1·1·1,1·1·0,93=1,023Pzmax
=
=1·1·1,1·1·0,93=1,023Pzmax
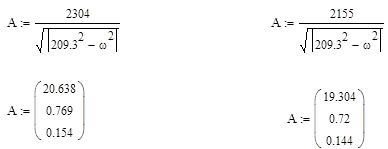
=![]() =2304 Н.
=2304 Н.
Pzmax
=![]() =2155 Н.
=2155 Н.
Задача № 3
Динамическая модель основных характеристик токарно-винторезного станка 16Б16А
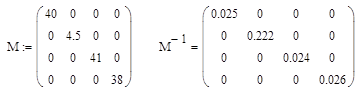
| j | 1 | 2 | 3 | 4 |
| kj , Н/м | 4,2·107 | 2,5·106 | 4 ·107 | 2,8·107 |
| mj , кг. | 40 | 4,5 | 41 | 38 |
Найти: собственные частоты каждой составляющей. Для каждой из частот определить собственные значения.
Решение
Уравнение динамического равновесия любой системы
[М]·{Z}= [K]·{Z}=0
Решая это уравнение, получаем матрицу масс, где основное условие
[A]= [M]-1 ·[C]
v=![]() (2.2)
(2.2)
Cv =340
t=1 мм
S=0,5мм/об
m=0,2
x=0,15
y=0,45
T=60 мин.
Kv = Кm u ×Кn u ×Кu u =1·0,9·1,15= 1,035
v=![]() 212 м/мин
212 м/мин
n=![]() (2.3)
(2.3)
n=![]() =1687 об/мин. → nстанд
=1600 об/мин
=1687 об/мин. → nстанд
=1600 об/мин
ω=![]() рад/с.
рад/с.
Vреал
=![]() м/мин
м/мин
Pz
=![]() (2.4)
(2.4)
Cp =300
t=1 мм
S=0,5 мм
y=0,75
х=1
n=-0,15
![]() =1·1·1,1·1·0,93=1,023
=1·1·1,1·1·0,93=1,023
Pz
=![]() =814 Н.
=814 Н.

Похожие работы
-
Система координат станка детали и инструмента
Система координат детали, станка, инструмента 1 Система координат детали. 2 Система координат станка. 3 Система координат инструмента. Система координат детали
-
Вертикально- фрезерные станки с ЧПУ компании Инжиниринг
РЕФЕРАТ НА ТЕМУ: Вертикально- фрезерные станки с чпу компании Инжиниринг. О КОМПАНИИ В ЦЕЛОМ. Современные, высокопроизводительные станки сЧПУ тайваньского производства, предлагаемой компанией, используются во всех отраслях промышленности: автомобильной, энергетической промышленности, аэрокосмической промышленности, приборостроении и прочие.
-
Расчет режимов резания при механической обработке
Федеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования Уфимский государственный авиационный технический университет
-
Оптимизация режимов резания на фрезерном станке
Тольяттинский Государственный Университет Кафедра “Технология машиностроения” Курсовая работа по дисциплине “Математическое моделирование"
-
Исследование влияния температурных деформаций шпиндельного узла горизонтально-фрезерного станка на точность обработки
Исследование зависимости температурной деформации шпиндельного горизонтально-фрезерного станка (при холостом ходу) и его узлов от времени работы и охлаждения. Пути минимизации воздействия нагрева на успешность осуществления технологического процесса.
-
Динамический расчет вертикально-фрезерного и токарного станков
Министерство Образования Российской Федерации Тольяттинский государственный университет Кафедра “Технология машиностроения” Отчет о практических работах по
-
Разработка технологического процесса механической обработки детали типа "Вал"
Методика и основные этапы разработки технологического процесса механической обработки детали - вала первичного КПП трактора ДТ-75. Характеристика и назначение данной детали, расчет необходимых параметров и материалов. Выбор и обоснование режимов резания.
-
Обтачивание цилиндрического валика Методы обработки изделий из стали
Контрольная работа №1 Задание 1 Обточить цилиндрический валик при заданных условиях. При этом необходимо: выбрать модель станка, по паспорту определить все параметры расчета.
-
Расчет режимов резания
Расчет рационального режима резания при обтачивании валика на станке. Выбор геометрических параметров режущей части резца, инструментального материала. Выбор углов в плане, угла наклона главной режущей кромки. Расчетное число оборотов шпинделя станка.
-
Обозначение осей координат и направлений перемещений исполнительных органов на схемах станков с числовым программным управлением (ЧПУ)
Стандартная система координат станка с числовым программным управлением. Направления стандартной системы координат различных видов станков. Методика и условные обозначения осей координат и направлений перемещений на схемах агрегатных станков с ЧПУ.