Название: Передаточные функции одноконтурной системы
Вид работы: контрольная работа
Рубрика: Математика
Размер файла: 357.28 Kb
Скачать файл: referat.me-218212.docx
Краткое описание работы: Практическая работа № 1 По заданным дифференциальным уравнениям определить операторные уравнения при нулевых начальных условиях, передаточные функции, структурные схемы звеньев, характеристические уравнения и их корни. Показать распределение корней на комплексной плоскости.
Передаточные функции одноконтурной системы
Практическая работа № 1
1. По заданным дифференциальным уравнениям определить операторные уравнения при нулевых начальных условиях, передаточные функции, структурные схемы звеньев, характеристические уравнения и их корни. Показать распределение корней на комплексной плоскости.
Оценить устойчивость каждого из звеньев.
а) ![]() ; б)
; б)![]() .
.
2. По заданной передаточной функции записать дифференциальное уравнение:
 .
.
1. а). Дифференциальное уравнение можно записать в виде:
![]() .
.
Обозначим Y(s) и F(s) как изображения сигналов соответственно y и f , тогда операторное уравнение (при нулевых начальных условиях) примет вид:
1,25s3Y(s) – 4s2Y(s) + 5sY(s) = 3F(s) – sF(s).
Данное уравнение можно преобразовать, вынеся Y(s) и F(s) за скобки:
Y(s). (1,25s3 – 4s2 + 5s) = F(s). (3 – s).
Отсюда получено:
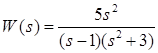
![]() .
.
Очевидно, что входной сигнал x
отсутствует, и выходной сигнал у
определяется только внешним воздействием f
(система, действующая по возмущению): ![]() , то получается уравнение Y(s) = WF(s).F(s). Структурная схема объекта приведена на рис. 1.
, то получается уравнение Y(s) = WF(s).F(s). Структурная схема объекта приведена на рис. 1.
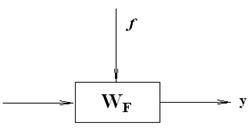
Рис.1
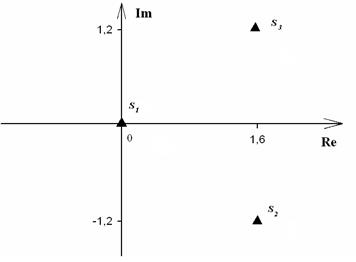
Рис. 2
Передаточная функция имеет знаменатель, называемый характеристическим выражением:
A(s) =![]() .
.
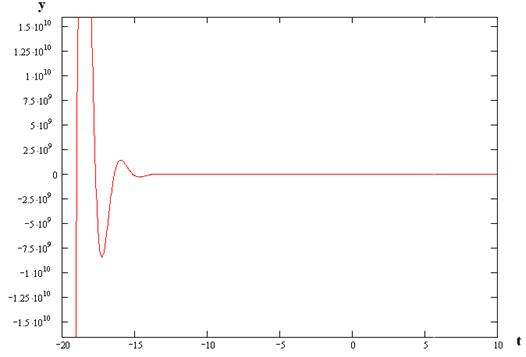
Если приравнять данное выражение к нулю, то образуется характеристическое уравнение ![]() , корни которого:
, корни которого:
![]() ,
, ![]() и
и ![]() .
.
Распределение корней на комплексной плоскости показано на рис. 2. По рисунку видно, что корни лежат в правой полуплоскости, следовательно, объект неустойчив.
б) Дифференциальное уравнение можно записать в виде:
![]() .
.
Обозначим Y(s), X(s) и F(s) как изображения сигналов соответственно y , x и f , тогда операторное уравнение (при нулевых начальных условиях) примет вид:
2s2Y(s) + 4sY(s) + 10Y(s) = 3X(s) + 4sF(s).
Данное уравнение можно преобразовать, вынеся Y(s) и X(s) за скобки:
Y(s). (5s2 + 4s + 10) = 3X(s) + 4sF(s).
Отсюда получено:
![]() .
.
Если обозначить передаточные функции объекта как
![]() и
и ![]() ,
,
то получается уравнение Y(s) = Wx(s).X(s) + WF(s).F(s). Структурная схема объекта приведена на рис. 3.
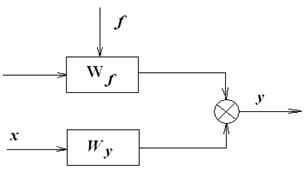
Рис. 3
Характеристическая функция имеет вид:
![]() ,
,
а характеристическое уравнение:
![]() .
.
Корни этого уравнения равны:
![]() и
и ![]() .
.
Распределение корней на комплексной плоскости показано на рис. 4:
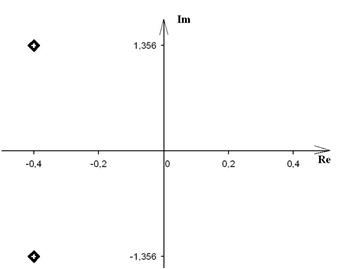
Рис. 4.
Все корни характеристического уравнения лежат в левой полуплоскости, очевидно, что объект устойчив.
2. Дана передаточная функция вида:
Зная, что по определению, ![]() , получим:
, получим:
 , тогда:
, тогда:
![]() .
.
Раскрывая скобки:
![]()
Применяя к полученному выражению обратное преобразование Лапласа, находим искомое дифференциальное уравнение:
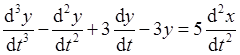 .
.
Практическая работа № 2
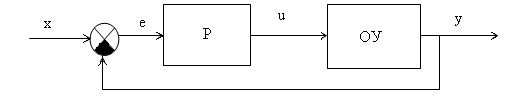
Дана одноконтурная АСР, для которой определена передаточная функция регулятора (Р) с настройками и дифференциальное уравнение объекта управления (ОУ). Требуется определить:
- передаточную функцию разомкнутой системы W∞(s),
- характеристическое выражение замкнутой системы (ХВЗС),
- передаточные функции замкнутой системы Фз(s) – по заданию, Фв(s) – по возмущению, ФЕ(s) – по ошибке,
- коэффициенты усиления АСР,
- устойчивость системы.
Р - ПИ-регулятор с ПФ вида  ;
;
дифференциальное уравнение объекта управления:
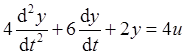 .
.
Определим передаточную функцию объекта:
W
об(
s
)
![]() .
.
Передаточная функция разомкнутой системы имеет вид:

Характеристическое выражение замкнутой системы:
![]() ;
;
Передаточные функции замкнутой системы:
 - по заданию;
- по заданию;
 - по ошибке;
- по ошибке;
 - по возмущению.
- по возмущению.
По передаточным функциям определим коэффициенты усиления путем подстановки в них s = 0:
К3 = Ф3(0) = 1 – по заданию;
КЕ = ФЕ(0) = 0 – по ошибке;
Кв = Фв(0) = 0 – по возмущению.
Определим устойчивость АСР по критерию Гурвица.
Так как коэффициенты ХВЗС а3 = 4, а2 = 6, а1 = 18, а0 = 4 (степень полинома n = 3), то матрица Гурвица имеет вид:
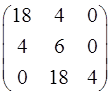
Диагональные миноры матрицы равны соответственно:
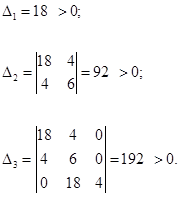
Поскольку все определители положительны, то АСР является устойчивой.
Практическая работа № 3
По табличным данным построить переходную кривую объекта, определить параметры передаточной функции объекта, рассчитать настройки ПИД-регулятора, обеспечивающие 20%-е перерегулирование.
DXвх = 5,5 кПа; DY = 0,149 %; tзап = 40 сек
| t, мин |
0 |
20 |
50 |
80 |
110 |
140 |
170 |
200 |
230 |
260 |
| D Y |
0 |
0,009 |
0,032 |
0,060 |
0,089 |
0,116 |
0,130 |
0,141 |
0,149 |
0,149 |
Полученная переходная характеристика изображена на рисунке 5:
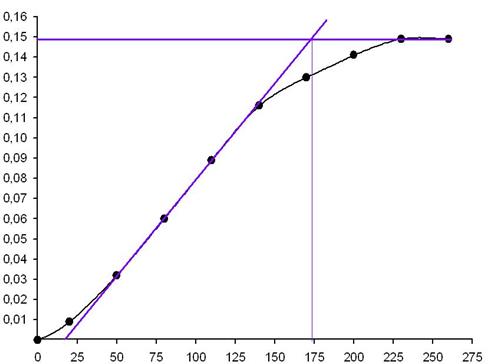
Рис. 5. Переходная характеристика.
Установившееся значение выходной величины составляет:
![]() ;
;
Коэффициент усиления равен:
![]() ;
;
Постоянная времени равна:
![]() .
.
Для процесса с 20 % перерегулированием ПИД-регулятора, его настройки:
![]() ;
;
![]() ;
;
![]() .
.
Практическая работа № 4
Дана одноконтурная АСР. Требуется определить:
· передаточные функции регулятора и объекта управления,
· передаточную функцию разомкнутой системы W∞(s),
· характеристическое выражение замкнутой системы (ХВЗС),
· передаточные функции замкнутой системы Фз(s) – по заданию,
Фв(s) – по возмущению, ФЕ(s) – по ошибке,
· коэффициенты усиления АСР,
· примерный вид переходных процессов по заданию, ошибке и возмущению,
· устойчивость системы.
Структурная схема АСР:
 |
W1(s): ![]() ; W2(s):
; W2(s): ![]() ;
;
K1 = 1,2; K0 = 1,0; K = 1,0
· Передаточная функция регулятора:
![]() .
.
· Передаточная функция объекта управления:
![]() .
.
Определим операторные уравнения звеньев объекта управления: для этого обозначим Y(s) и U(s) как изображения сигналов соответственно y и u , тогда операторные уравнения примут вид:
W1(s): sY(s) = 2U(s);
W2(s): 2s2Y(s)+sY(s)+4Y(s)=7U(s).
Данные уравнения можно преобразовать, вынеся Y(s) и U(s) за скобки:
W1(s): sY(s) = 2U(s);
W2(s): Y(s)·(2s2+s+4)=7U(s).
Отсюда получено:
W1(s): Y
(
s
)
= ![]()
W2(s): Y(s)
=![]() .
.
Тогда:
![]()
![]() .
.
Передаточная функция объекта управления:

· Передаточная функция разомкнутой системы:
![]()
![]()
· Характеристическое выражение замкнутой системы:
![]()
· передаточные функции замкнутой системы
Ф3(s) – по заданию:
![]()
ФЕ(s) – по ошибке:
![]()
ФВ(s) – по возмущению:
При определении передаточной функции по возмущению принимается Wу.в. = Wоу. Тогда:

![]() .
.
· По передаточным функциям определим коэффициенты усиления путем подстановки в них s = 0:
К3 = Ф3(0) = 1 – по заданию;
КЕ = ФЕ(0) = 0 – по ошибке;
Кв = Фв(0) = 0 – по возмущению.
· Определим устойчивость АСР по критерию Гурвица.
Так как коэффициенты ХВЗС ![]() (степень полинома n = 4), то матрица Гурвица имеет вид:
(степень полинома n = 4), то матрица Гурвица имеет вид:
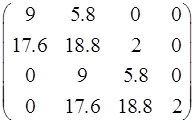
Диагональные миноры матрицы равны соответственно:
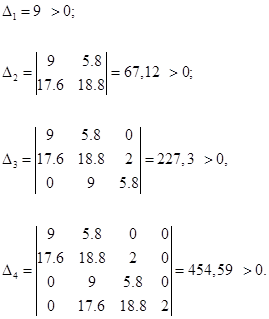
Поскольку все определители положительны, то АСР является устойчивой.
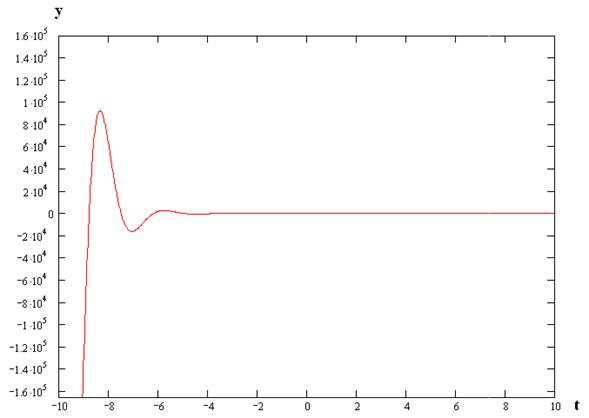
· Определим вид переходных процессов по заданию, ошибке и возмущению:
а) По заданию:
![]()
Корни знаменателя:
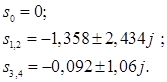
Изображение разбивается на сумму дробей:
 .
.
Тогда оригинал y (t), согласно таблицам, имеет вид:
y (t) = y 0 + y 1,2(t) + y 3,4(t) =
![]() +
+![]() ;
;
где a1,2, α3,4 и w1,2, w3,4 - действительная и мнимая части пары комплексных корней s1,2 и s3,4 соответственно.
C1,2, С3,4 и D1,2, D3,4 – действительная и мнимая части пары коэффициентов М1 и М3 соответственно.
Для корня s0 = 0:
 ;
;
Для корней ![]() :
:
 =
= ;
;
Для корней ![]() :
:

 ;
;
Тогда:
![]()
Получим оригинал:
![]()
б) По ошибке:
![]()
Корни знаменателя:
Изображение разбивается на сумму дробей:
 .
.
Тогда оригинал y (t), согласно таблицам, имеет вид:
y (t) = y 1,2(t) + y 3,4(t) =
![]() +
+![]() ;
;
где a1,2, α3,4 и w1,2, w3,4 - действительная и мнимая части пары комплексных корней s1,2 и s3,4 соответственно.
C1,2, С3,4 и D1,2, D3,4 – действительная и мнимая части пары коэффициентов М1 и М3 соответственно.
Для корней ![]() :
:


Для корней ![]() :
:

 ;
;
Тогда:
![]()
Получим оригинал:
![]()
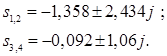
в) По возмущению:
![]()
Корни знаменателя:
Изображение разбивается на сумму дробей:
 .
.
Тогда оригинал y (t), согласно таблицам, имеет вид:
y (t) = y 1,2(t) + y 3,4(t) =
![]() +
+![]() ;
;
где a1,2, α3,4 и w1,2, w3,4 - действительная и мнимая части пары комплексных корней s1,2 и s3,4 соответственно.
C1,2, С3,4 и D1,2, D3,4 – действительная и мнимая части пары коэффициентов М1 и М3 соответственно.
Для корней ![]() :
:


Для корней ![]() :
:

 ;
;
Тогда:
![]()
Получим оригинал:
![]()
Похожие работы
-
Кривые разгона объекта управления
Цель работы 1. Изучить методику экспериментального определения кривых разгона объекта управления и определить кривые разгона по каналам регулирования и возмущения для напорного бака.
-
Классический метод математического описания и исследования многосвязных систем
Математическая модель линейной непрерывной многосвязной системы. Уравнение движения и общее решение неоднородной системы линейных дифференциальных уравнений. Сигнальный граф системы и структурная схема. Динамики САУ и определение ее характеристик.
-
Синтез САУ
Задание для курсовой работы по теории управления Исследовать систему, при обнаружении свойств, отрицательно влияющих на работоспособность системы, удалить их, или уменьшить их влияние. При необходимости обеспечить регулирование наилучшем регулятором.
-
Дифференцированные уравнения
1.ВВЕДЕНИЕ 2.ОСНОВНЫЕ ПОНЯТИЯ 2.1.ЗАПИСЬ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ В СТАНДАРТНОЙ И ОПЕРАТОРНОЙ ФОРМЕ В теории автоматического регулирования в настоящее время принято записывать дифференциальные уравнения в двух формах.
-
Дифференциальные уравнения для электрической цепи
Министерство Образования Российской Федерации ИрГТУ Кафедра АПП Курсовая работа по математике Выполнил: студент группы АТП-05-1 Поверил: профессор
-
Передаточная функция дискретной системы
Определение связи между выходом и входом для непрерывных систем. Вычисление передаточной функции и основы структурного метода дискретной системы. Расчет передаточной функции дискретной системы с обратной связью. Передаточные функции цифровых алгоритмов.
-
Системы с одним и двумя воздействиями
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ Кафедра Информационных технологий автоматизированных систем РЕФЕРАТ На тему:
-
Анализ дифференциальных уравнений
Порядок и процедура поиска решения дифференциального уравнения. Теорема существования и единственности решения задачи Коши. Задачи, приводящие к дифференциальным уравнениям. Дифференциальные уравнения первого порядка, с разделяющими переменными.
-
Метод контурных токов, метод узловых потенциалов
Метод контурных токов позволяет уменьшить количество уравнений системы. Метод узловых потенциалов. Положительное направление всех узловых напряжений принято считать к опорному узлу. Определить токи в ветвях.
-
Существование решения дифференциального уравнения и последовательные приближения
Теорема существования и единственности решения уравнения.