Название: Моделирование структурных схем в среде SIMULINK пакета MATLAB
Вид работы: лабораторная работа
Рубрика: Информатика и программирование
Размер файла: 54.35 Kb
Скачать файл: referat.me-137022.docx
Краткое описание работы: Практические навыки моделирования структурных схем в среде SIMULINK пакета MATLAB. Построение графиков функций в декартовой системе координат. Решение систем линейных и нелинейных уравнений. Работа с блоками Sum, Algebraic Constraint, Gain, Product.
Моделирование структурных схем в среде SIMULINK пакета MATLAB
Целью данной лабораторной работы является изучение принципов и получения практических навыков моделирования структурных схем в среде SIMULINK пакета MATLAB.
ТЕОРЕТИЧЕСКИЕ ИССЛЕДОВАНИЯ
Задание 1
Построить график функции в декартовой системе координат. Результаты представить в виде графика.
![]()
Диапазон изменения аргумента: 0.1-1.8
Шаг: 1/20=0.05
Структурная схема для построения данного графика функции представлена на рисунке 1.1
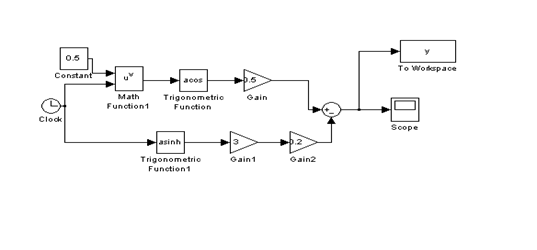
Рисунок 1.1 – Структурная схема моделирования функции к заданию 1
Задание 2
Решить системы линейных и нелинейных уравнений. Начальные приближения:
 ;
;
Задана система линейных уравнений:
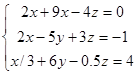 ;
;
Преобразую систему к виду:
 ;
;
Структурная схема для решения данного линейногоуравнения представлена на рисунке 1.2
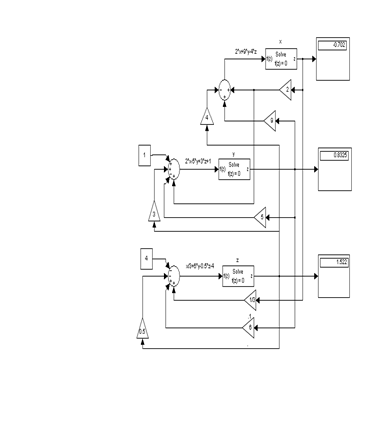
Рисунок 1.2 - Структурная схема для решения системы линейныхуравненийк заданию 2
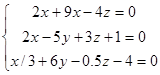
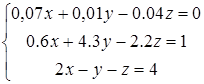
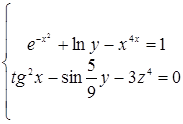
Задана система нелинейных уравнений:
 ;
;
Преобразую систему к виду:
 ;
;
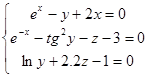
Структурная схема решения данного линейногоуравнения представлена на рисунке 1.3
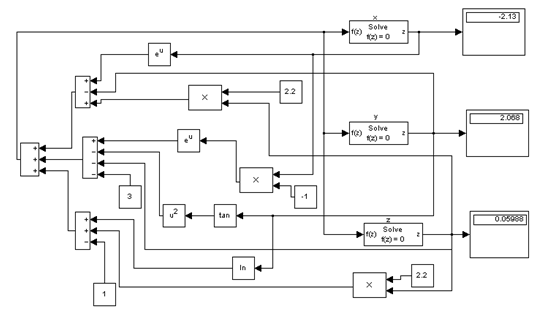
Рисунок 1.3 - Структурная схема для решения системы нелинейныхуравненийк заданию 2
Задание 3
Осуществить моделирование структуры, представленной на рисунке 1.4
Рисунок 1.4 – Структурная схема к заданию 3
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ
1. Структурная схема для построения графика функции  к заданию 1 представлена на рисунке 2.1
к заданию 1 представлена на рисунке 2.1
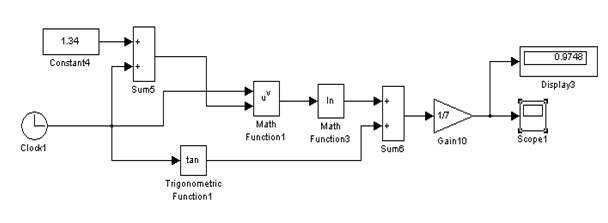
Рисунок 2.1 – Структурная схема моделирования функции к заданию 1
Построил график функции к заданию 1, представленный на рисунке 2.2.
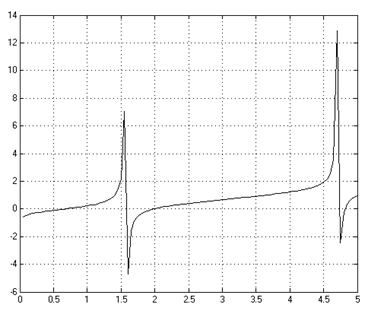
Рисунок 2.2 – График функции к заданию 1
2. Задана система линейных уравнений:
 ;
;
Структурная схема для решения данного линейногоуравнения представлена на рисунке 2.3
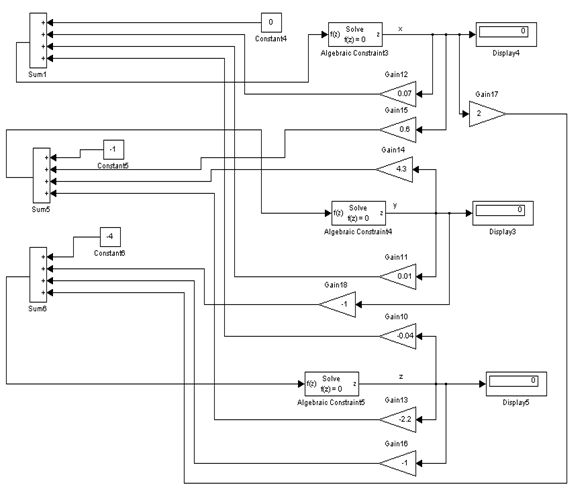 Рисунок 2.3 - Структурная схема для решения системы линейныхуравненийк заданию 2
Рисунок 2.3 - Структурная схема для решения системы линейныхуравненийк заданию 2
Построил структурные модели к заданию 2. Для линейной системы уравнений получил следующие значения:
 ;
;
3. Задана система нелинейных уравнений:
 ;
;
Структурная схема решения данного линейногоуравнения представлена на рисунке 2.4
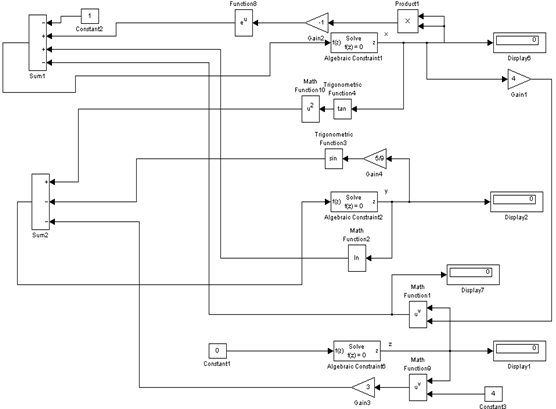
Структурная схема для решения системы нелинейныхуравненийк заданию 2.
Для нелинейной системы уравнений получил такие значения:
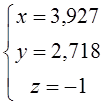 .
.
4. Построил структурную модель к заданию 3 (рисунок 2.5). График результатов работы модели F ( t , y 1 ) представлен на рисунке 2.6.
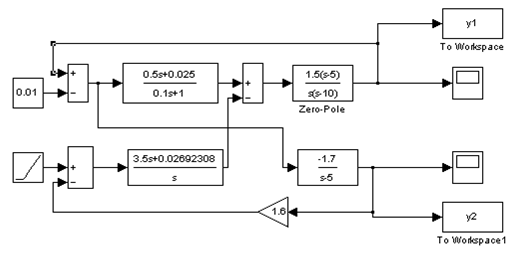
Рисунок 2.5 – Структурная схема к заданию 3
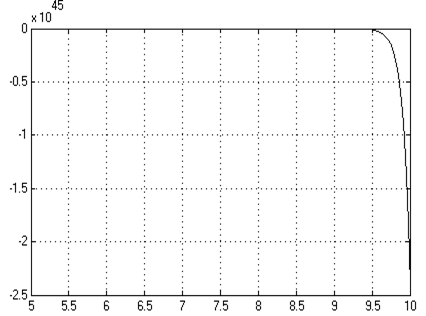
Рисунок 2.6 - График F ( t , y 1 ) результатов работы функции модели 3 к заданию 3
График результатов работы модели F ( t , y 2 ) представлен на рисунке 2.7.
|
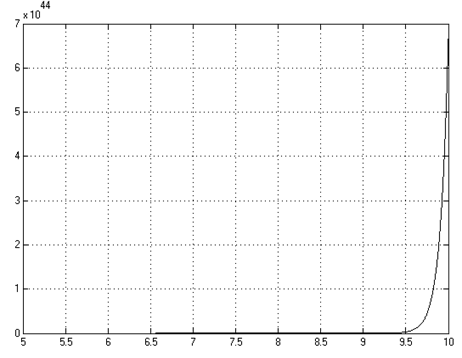
Рисунок 2.7 - График F ( t , y 2 ) результатов работы функции модели 3 к заданию 3
ВЫВОДЫ
В результате выполнения данной лабораторной работы получил практические навыки моделирования структурных схем в среде SIMULINK пакета MATLAB. Также я научился строить графики функций в декартовой системе координат (рисунок 2.1). Я научился решать системы линейных и нелинейных уравнений, то есть нашел корни этих уравнений
А также получил результаты работы модели в задании 3 (рисунок 2.2 и 2.3).
Научился работать с такими блоками, как Sum, AlgebraicConstraint, Gain, Productи другими.
Похожие работы
-
Построение графиков функций. Решение нелинейных уравнений и систем нелинейных уравнений
Методика и основные этапы построения ранжированных переменных, сферы и особенности их практического применения. Порядок построения графиков в декартовой системе. Приведение примеров решение нелинейных уравнений и их систем при помощи решающего блока.
-
Дослідження перехідних характеристик цифрових САК
Дослідження цифрових систем автоматичного керування. Типові вхідні сигнали. Моделювання цифрової та неперервної САК із використання MatLab. Результати обчислень в програмі MatLab. Збільшення періоду дискретизації цифрової системи автоматичного керування.
-
ЭВМ с использованием математического пакета MathCad в среде Windows 98 для решения дифференциального уравнения n-го порядка
Решение дифференциального уравнения N-го порядка методом интегрирования при помощи характеристического уравнения, методом интегрирования и операторным методом для значений аргументов при заданных начальных условиях и нулевых уравнения 4–го порядка.
-
Определение оптимального по квадратичному критерию качества программного управляющего воздействия
Структурная схема объекта управления (ОУ). Граничные условия, критерий качества вида. Вид возмущающего воздействия. Аналитическое выражение оптимального программного управляющего воздействия u*(t), переводящее ОУ из начального состояния в конечное.
-
Одномерная оптимизация функций методом золотого сечения
Создание программы в среде программирования MatLab для решения задачи одномерной оптимизации (нахождение минимума и максимума заданных функций) методом золотого сечения, построение блок-схемы алгоритма и графическое изображение исследованных функций.
-
Построение графического интерфейса в системе Matlab
Matlab как система инженерных и научных вычислений, принцип ее работы и назначение, сферы применения и оценка эффективности, анализ сильных и слабых сторон. Алгоритм создания интерфейса, основные способы и методы создания форм и элементов управления.
-
Порядок моделирования входного сигнала
Порядок и методика моделирования входного сигнала, общие принципы представления сигналов математическими моделями. Взаимосвязь математических моделей с компьютерными, их место и значение на современном этапе. Пакеты для моделирования различных процессов.
-
Моделирование движения невесомой заряженной частицы в электрическом поле в среде MathCAD и Matlab
Моделирование движения невесомой заряженной частицы в электрическом поле, созданном системой нескольких фиксированных в пространстве заряженных тел, в случае, когда заряженные тела находятся в одной плоскости и в ней же находится движущаяся частица.
-
Проектирование линейных стационарных САУ с микропроцессорными регуляторами
Анализ последовательного корректирующего устройства, основанного на использовании логарифмических частотных характеристик. Определение дискретной передаточной функции микропроцессорного регулятора. Динамика системы в периоде квантования по времени.
-
Решение задачи с помощью программ Mathcad и Matlab
Исследование связи между временем достижения торпеды, снабжённой разгонным двигателем (глубинной бомбы) заданной глубины и формой корпуса противолодочного корабля: сферической, полусферической, каплевидной. Представление этой зависимости графически.